
透過運動控制系統驗證光電感測器與系統效能
前言:決定成敗的關鍵—光電系統的效能驗證
在航太國防、衛星通訊與自動駕駛等尖端領域,光電(EO)感測器如同系統的千里眼,其指向的精準度與成像品質,是決定任務成敗、確保人員安全的基石,然而,一個像素的微小偏差,在長距離應用中都可能放大為數公尺的誤差,導致災難性的後果;因此,如何透過精準、可靠的測試,來百分之百驗證這些精密「眼睛」的效能,便成為產品從實驗室走向市場前,最關鍵的投資與挑戰,本文將不僅是技術的闡述,更是一份協助您實現成功驗證的實戰指南。
致研發工程師:從根源解決測試痛點
身為研發工程師,您最關切的核心問題,莫過於量測數據的絕對可靠性,在進行最小可解析溫差(MRTD)或調變轉換函數(MTF)等精密測試時,最大的挑戰在於如何清晰地歸因誤差來源:觀測到的誤差,究竟是來自待測感測器本身,還是源於測試運動平台的不穩定?
運動平台的抖動(Jitter)、不佳的重複性、以及多軸運動疊加的幾何誤差,都可能污染寶貴的測試數據,讓無數心血功虧一簣,本篇文章將從您的視角出發,深入探討如何從設計根本上,打造一個誤差遠小於待測物的測試系統,並提供多種實用的系統佈局,幫助您克服空間、負載與特殊環境(如真空艙)的限制,確保每一次量測,都真實反映產品的極致效能。
本篇文章重點在闡述光電(EO)感測器的原理,並說明如何運用運動控制設備進行精準測試,文中將深入探討光電(EO)感測器的種類、驗證其效能所需的光子學測試方法、基礎測試設計原則,以及選擇合適運動設備的最佳實務,同時也將介紹多種利用運動系統精確控制光電(EO)感測器視線的技術,最後提出三種可應用於感測器動態測試的光電(EO)測試佈局。
光電(EO)感測器及其應用
光電感測器廣泛應用於軍事、警政、科學研究、政府實驗室及航太產業等領域,其應用範疇包括實驗室研究所需的可見光與紅外線相機、計量學設備、雷射加工系統、車輛駕駛與防撞感測器、飛彈尋標器、監控與瞄準系統、望遠鏡以及衛星影像系統,在光電系統的設計階段,工程師會建立模型來模擬感測器在各種光學條件下對遠距離物體的解析能力,此模型會評估物件偵測與識別效能如何受到環境因素的影響,例如:大氣干擾、背景溫度、戰場遮蔽物以及可見光與不可見光的照度水平,而在光電感測器的製造過程中,必須透過多種測試來檢驗其理論設計效能,以確保光學元件與成像器的實際表現符合預期。
光子學測試
導入自動化光電(EO)光子學測試,能夠顯著縮短產品測試時間、降低重工成本並提升測試精度,這些優勢最終會反映在更低的總體成本、更高的感測器品質與產出率上,透過自動化運動測試所取得的精確光電計量資料,還能進一步用於改善感測器效能,藉由適當的電子電路,成像的失真資料可被用作即時數位校正感測器影像的查閱表 (lookup table),透過結合不同的測試目標與多樣化的自動化運動掃描模式,可以測定多項光電(EO)效能指標,這些感測器規格包括有效焦距、影像均勻度與失真映射、成像器與光學元件的對準、視場角量測、最小可解析對比度(MRC,Minimum Resolvable Contrast)、最小可解析溫差(MRTD,Minimum Resolvable Temperature Difference)、雜散光測試、空間解析度、調變轉換函數(MTF,Modulation Transfer Function)、物件追蹤效能及其他光學參數,由於衛星成像儀的效能至關重要,因此必須針對特定光頻率,驗證每個像素的雜訊水平、均勻度和偵測效能,對於衛星光電(EO)感測器,前述的許多測試不僅要在正常大氣條件下執行,還需在高真空環境(例如 10⁻⁶ hPa 或更低的壓力)與低溫環境(例如深冷溫度)下再次進行,以模擬太空中的實際運作條件,在這些真空應用中,運動系統的材料與潤滑劑需要特殊處理,以確保在真空艙內具備低釋氣特性並能在低溫下正常運作,有時運動測試系統甚至需要加熱與絕緣,以維持編碼器和馬達的正常功能。
結合光子學設備與運動系統
測試光電(EO)感測器與系統時,會搭配多種專業光子學設備,例如:用以呈現模擬目標的準直儀、改變影像波長的濾光輪、解析度條狀目標、視場失真目標、可變紅外線或可見光源、雜散光偵測器,甚至是雷射反制措施,測試物件通常會透過準直儀呈現給感測器,用以測試感測器的遠場效能,利用精確的定位讓這些光子學系統在感測器視場內移動,將能提供與感測器設計相關聯的影像資料,進而驗證其效能,由於透鏡會將一個收斂的角視場投射到一維或二維偵測器陣列上,因此測試設備的目標物必須以感測器焦點為中心,進行均勻的角度步進移動,才能準確地測試感測器的視場,如果運動系統的移動與穩定精度能夠低於感測器的像素解析度等級,便可以有效地描繪出完整的視場特性。
寬視場與窄視場感測器及光電系統
感測器等級測試
寬視場(WFOV,Wide field of view)感測器主要用於提升態勢感知能力,以及在大範圍區域內偵測物件或目標,因此,繪製其失真圖譜對於驗證設計與製造品質至關重要,WFOV 感測器在偏離光學中心的位置通常會產生較大的失真,因為這些區域的透鏡與偵測器之間的夾角更大,這類感測器在視場(FOV)中心 70% 範圍以外的區域,影像失真可能相當顯著,量測到的失真資料可用於數位校正影像,並能準確地將疊加的符號定位於影像上。
窄視場(NFOV,Narrow field of view)感測器具備高放大倍率,通常應用於長距離監控、遠程物件識別、追蹤與瞄準,NFOV 的像素解析度通常遠高於 WFOV 感測器,因此運動系統必須進行更微小、更精確的移動來測試其窄視場,如圖 1 所示,NFOV 與 WFOV 感測器可以安裝在雲台上進行效能測試,測試過程中的步進尺寸、精度、重複性、視線抖動以及離軸運動誤差,都必須遠小於感測器的像素解析度與系統所要求的誤差預算。
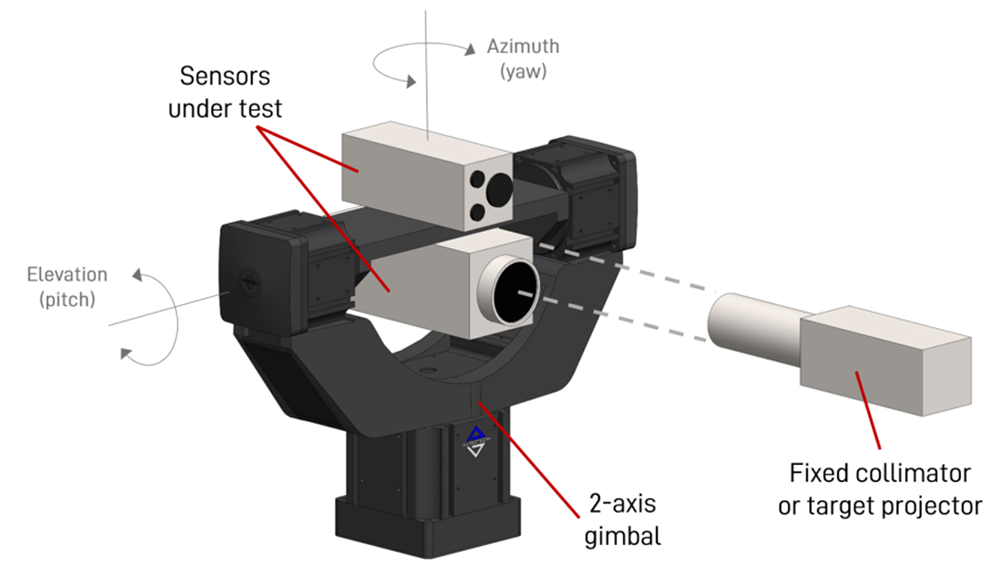
圖 1. 寬視場(WFOV)與窄視場(NFOV)感測器測試雲台範例。
系統等級測試
在光電(EO)系統等級的測試中,必須將光電成像感測器、雷射測距儀與標定器、具備慣性穩定視線(LOS,Line of Sight)指向功能的控制系統伺服雲台、基座或吊艙,以及影像處理與物件追蹤系統等元件整合起來共同測試,以驗證它們之間的互動與整體效能是否正確,如圖 2 所示,一個光電監控系統可被安裝在雲台上,並對所有被動與主動的光電及穩定系統進行測試,另一個系統等級的測試範例是,將一個包含慣性導引自動駕駛系統的飛彈尋標器安裝起來,並進行運動結合光電(EO)測試,系統等級的測試通常需要在呈現一個移動的光電(EO)目標的同時,利用振動台或傾斜台對待測物(UUT)施加基座運動,以模擬待測物(UUT)在真實世界操作中的載具基座運動或飛行狀態,透過運動系統模擬目標運動與載具基座運動的自動化光電(EO)測試,是驗證完整系統效能與品質的關鍵環節。
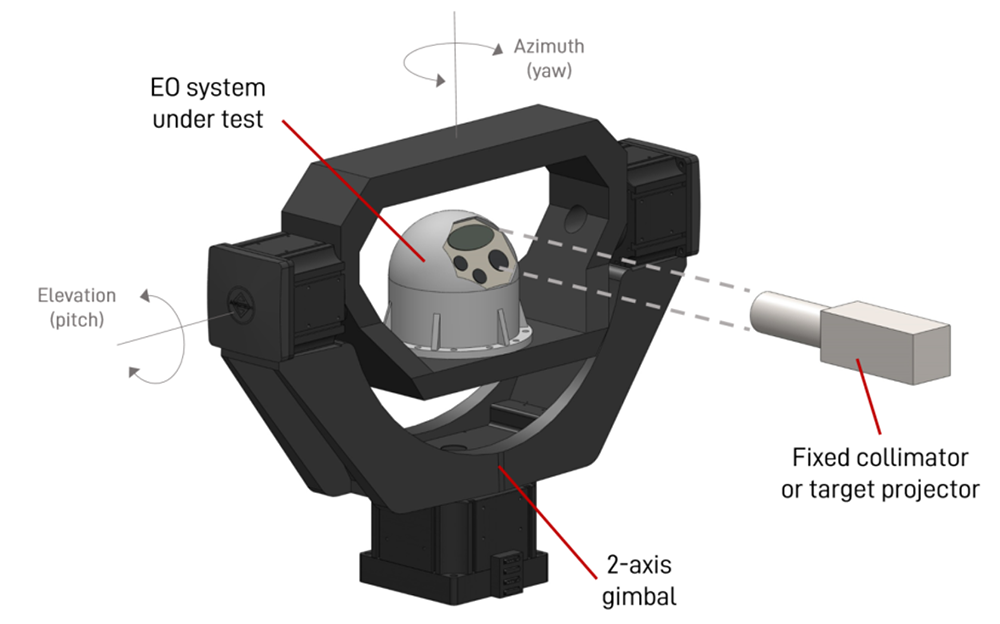
圖 2. 光電監控系統測試範例。
光電(EO)運動測試系統的基本設計實務
測試運動系統角度效能的考量
隨著科技演進,更高密度的偵測器、更靈敏的成像器以及更優異的訊號處理技術,使得光電(EO)系統的像素解析度與指向精度規格不斷提升,擁有一個能夠精確且可重複地移動目標視線、並以精確、均勻的步進通過感測器視場的高精度角向定位系統,對於確保成功的光電(EO)測試結果至關重要,對於某些測試,例如:失真量測,目標物在移動至預定步進點的過程中,必須與待測物(UUT)保持相同的固定距離,以確保光電(EO)像素解析度在每個位置都相同,同時,維持目標物垂直於待測物(UUT)也相當重要,如此才能確保目標物的對稱性與尺寸視角在每個位置都一致,在測試影像處理與追蹤系統時,則會改變目標物的尺寸、視角及遮蔽情況,以確認追蹤演算法能夠適應變化的目標。
測試設計經驗法則
在設計一個光電(EO)測試系統時,請遵循以下運動系統的基本原則,以獲得最佳的測試成果:
- 盡可能減少軸數,並讓運動機構越靠近待測物(UUT)越好:
減少運動軸數與堆疊的平台數量,將使系統更加精確,並減少整體的抖動,在視線路徑中增加更多的運動軸,會引入其他需要考量的位置誤差、軸承誤差以及能量與抖動來源。 - 力求運動規格達到待測物(UUT)像素解析度尺寸的十分之一:
將運動的精度、重複性、最小步進尺寸與抖動控制在小於一個像素尺寸的範圍內,以獲得優良的測試結果,運動系統必須能夠移動並穩定至比被測感測器解析度更小的層級,否則可能發生影像模糊。 - 運動致動器內建的高基礎編碼器(HFE,High Fundamental Encoder)解析度對於最小化測試設備的位置誤差與抖動至關重要,無論是靜態影像分析測試或是移動視線測試,具備HFE 解析度的系統都能提供更低的抖動、更佳的精度、重複性與步進能力。
- 測試平台應為一個剛性、隔振的安裝表面,用以承載設備:
基座的振動、不佳的平坦度、不良的剛性,或是待測物(UUT)與測試設備安裝表面的分離,都可能對精密的量測產生不利影響,當一個沉重的運動測試系統移動時,可能會使其安裝表面傾斜或彎曲,務必考量基座剛性與移動質量可能造成的撓曲之間的關係,並注意安裝表面的撓曲與剛性需要對照光電(EO)測試的需求進行檢核,光學平台能提供隔振與通用的安裝孔,但其平坦度不如精細研磨的花崗岩平台,光學平台在高負載移動下可能會彎曲,並導致測試設備的視線誤差,安裝表面的平坦度會影響運動系統的軸承線性與角度效能,因此必須謹慎確保安裝表面的平坦度誤差不會顯著影響運動系統的效能,特別是相對於測試光電(EO)感測器所需的精度而言。
測試佈局的決策
第一個需要考量的測試佈局是,應該移動待測物(UUT)還是移動測試設備,待測物(UUT)、測試設備的實體尺寸與限制,以及測試場地的佈局,往往決定了應該移動哪一個物件,如果待測物(UUT)或測試設備體積非常龐大,或是有許多軟管、纜線或其他無法移動、或需要極大力或力矩才能彎曲的元件,那麼它就不是一個適合移動的選項,在可能的情況下,應該將較小、較不受束縛的物件視為移動單元,移動的物件越大,運動系統的尺寸就會越大,成本也越高。
這些考量因素將測試設計導向三種典型的佈局之一:
移動待測物(UUT)而測試設備固定、利用反射鏡雲台在待測物(UUT)與測試設備之間操控影像視線、以及移動測試設備而待測物(UUT)固定。
移動待測物(UUT),固定測試設備的佈局
移動待測物(UUT)能將測試設備所產生的誤差對感測器焦點的影響降到最低,圖 1 與圖 2 展示了移動 WFOV/NFOV 感測器及完整光電(EO)系統,同時觀測固定的光電(EO)測試設備(如圖中所示的目標準直儀)的範例,將待測物(UUT)安裝在一個雙軸雲台上,可以提供大約 -60 度至 +135 度的垂直測試角度,以及接近 +/-80 度的水平視場測試角度,超出此範圍感測器的視線就會被雲台阻擋,如果上方的雲台軸可以使用測角儀,待測物(UUT)便能在水平方向進行 360 度測試,但垂直角度可能僅有 +/-45 度或更小,在此佈局中,旋轉軸的運動誤差對整體測試精度的影響很小,因為光電(EO)焦點是置於雲台軸的中心,如果能將雲台的軸承傾斜誤差運動控制在感測器的次像素等級,並將軸的線性幾何誤差控制在小於一個像素,此配置將能產生極小的測試設備視線誤差,對齊待測物(UUT)與雲台的座標系統非常重要,並且應透過一台攝影機觀看目標物,並在水平方向掃描雲台的方位角,同時擷取目標物的垂直影像位置,但不移動俯仰軸,來檢查由雲台軸的正交性與安裝問題所引起的視線串擾,大多數運動控制器都具備誤差校正功能,允許控制器透過內插一個方位角對俯仰角的正交性查閱表來自動校正正交性誤差。
以上這些要點能將測試設備的運動誤差降至最低,因此任何待測物(UUT)的視線量測結果,都能真實反映成像器穿透光學元件後所見的影像。
在待測物(UUT)與測試設備之間操控視線的佈局
一個相對更簡單且高度精確的光電(EO)系統測試方法是,在光電(EO)感測器附近放置一個反射鏡雲台,用以移動待測物(UUT)相對於測試目標的視線,並精確地在待測物(UUT)與測試設備之間操控視線,如圖 3 所示,這種方式無需將光電(EO)系統安裝到運動系統上,也避免了處理光電(EO)系統在運動系統上的纜線、軟管及其他元件的問題,反射鏡的尺寸必須足夠大,以便在其表面上操控視線影像的直徑(而非像其他兩種測試佈局那樣移動待測物(UUT)或測試設備),測試設計者需要注意的是,如果反射鏡雲台在方位角上偏離軸線 45 度,待測物(UUT)影像在其上的直徑會是雲台在 0 度時的兩倍,反射鏡雲台的實體行程只需要感測器總視場角(FOV)的一半,因為在雲台上反射影像角度會使光電(EO)感測器與測試設備之間的影像角度加倍,在訂購設備前,應使用光線追蹤圖模擬測試的完整角向影像路徑,以確保其能涵蓋感測器的視場(FOV),且雲台的任何部分都不會對影像產生漸暈(vignetting),3D 模型是一個有效的工具,可以用來檢查光學影像的干涉,並驗證測試佈局具備完整的視場能力。
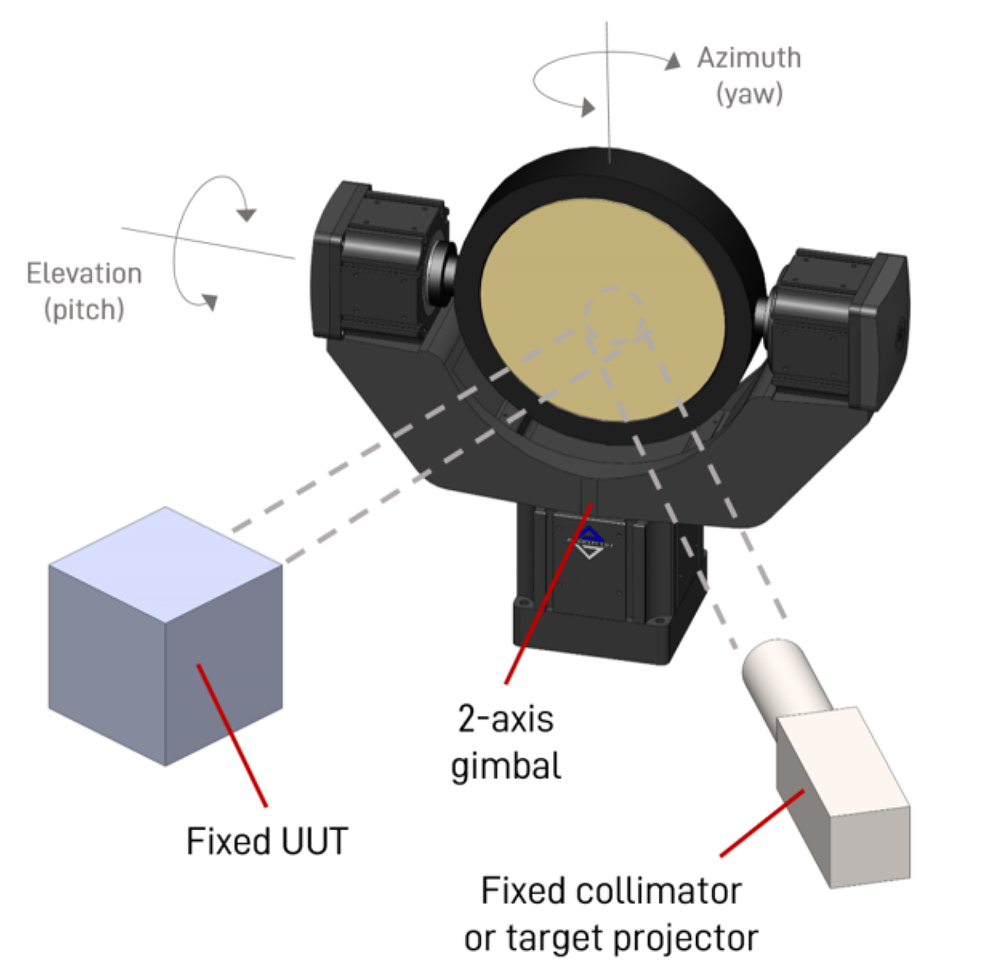
圖 3. 在待測物(UUT)與測試設備之間操控視線。
如果成像器位於真空艙內,可能需要將光子學測試設備置於艙外,使用反射鏡雲台將目標視線透過真空艙的窗口反射至艙內的待測物(UUT),是一個有效的方法,可以將非真空等級的設備保留在艙外,視線路徑上的折射率變化與窗口失真可以被量測並從測試資料中移除,如果這些誤差無法實際地被移除,則可能需要將目標與反射鏡雲台一同放入真空艙內,使用一個具備中至高頻寬的反射鏡雲台,也是一個模擬光電(EO)系統操作中對移動目標進行感測與追蹤測試的良好方法,這同時也是一個更簡單、更經濟的解決方案,因為待測物(UUT)與測試設備的機械和電氣介面都不需要移動。
固定待測物(UUT),移動目標的測試佈局
此測試佈局,如圖 4 所示,適用於光電(EO)感測器非常龐大、沉重,或因其特性而無法在測試過程中移動的情況,在一個待測物(UUT)感測器的視場(FOV)周圍以角度方式移動測試設備,可能會使控制程式變得複雜,特別是當感測器具有寬視場(WFOV)時,要讓一個目標投影器或干涉儀在一個光電(EO)感測器的視場(FOV)周圍指向,將需要一個五軸或六軸運動系統,使其在以感測器為中心的半球體上移動,針對此類測試而建構的系統範例如圖 5 所示。
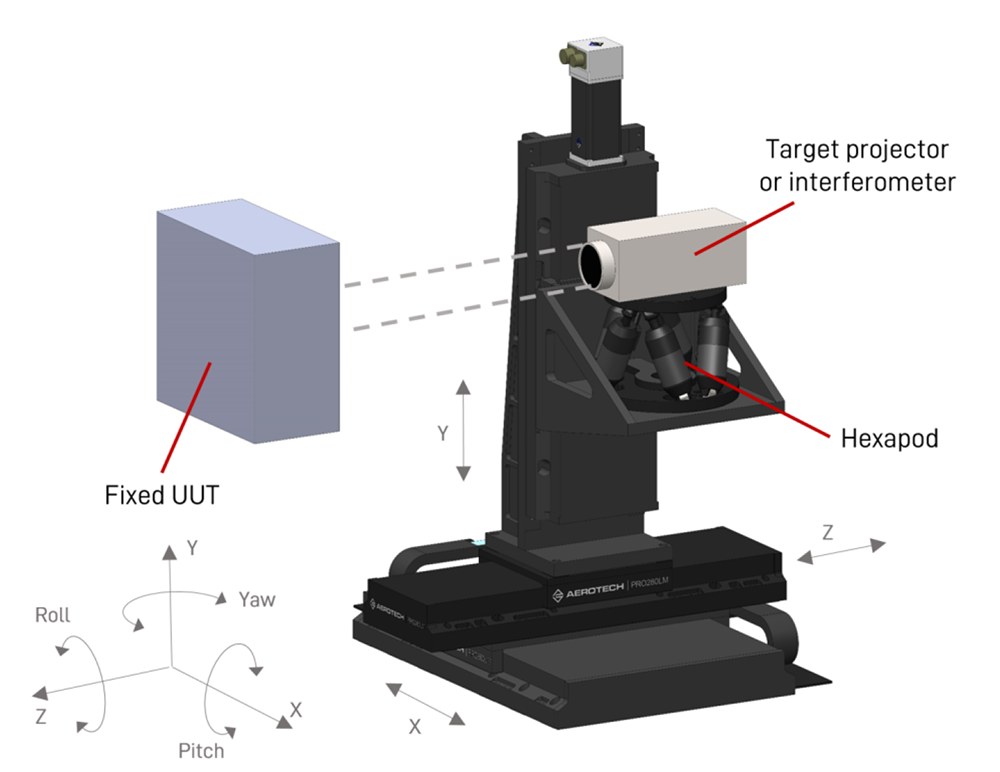
圖 4. 固定待測物(UUT),測試設備在六軸六足平台及長行程線性 X、Y、Z 軸上移動。
一個具備 200 公斤負載能力的六足平台安裝在 450mm 行程的 X 軸與 Z 軸上的系統範例如圖 5 所示。

圖 5. 具備 200 公斤負載能力之六足平台安裝於 450mm 行程 X 與 Z 軸上的系統範例。
如果還需要滾轉運動,則需要一個 Y 軸線性平台與六足平台的滾轉運動相結合,如果焦距或感測器的視場(FOV)很大,六足平台可能沒有足夠的行程來單獨覆蓋整個感測器視場(FOV),六足平台也可用於校正由線性平台運動所產生並導致視線誤差的幾何誤差運動。
一個 XYZ 搭配雲台的解決方案,如圖 6 所示,可以執行與 XYZ 搭配六足平台解決方案相似的運動,XYZ 搭配雲台的方法允許比六足平台解決方案大得多的角度運動,因此更適合寬視場(WFOV)感測器的應用,然而,這種解決方案由於機構封裝與軸向佈局的限制,在視場方面存在局限性。
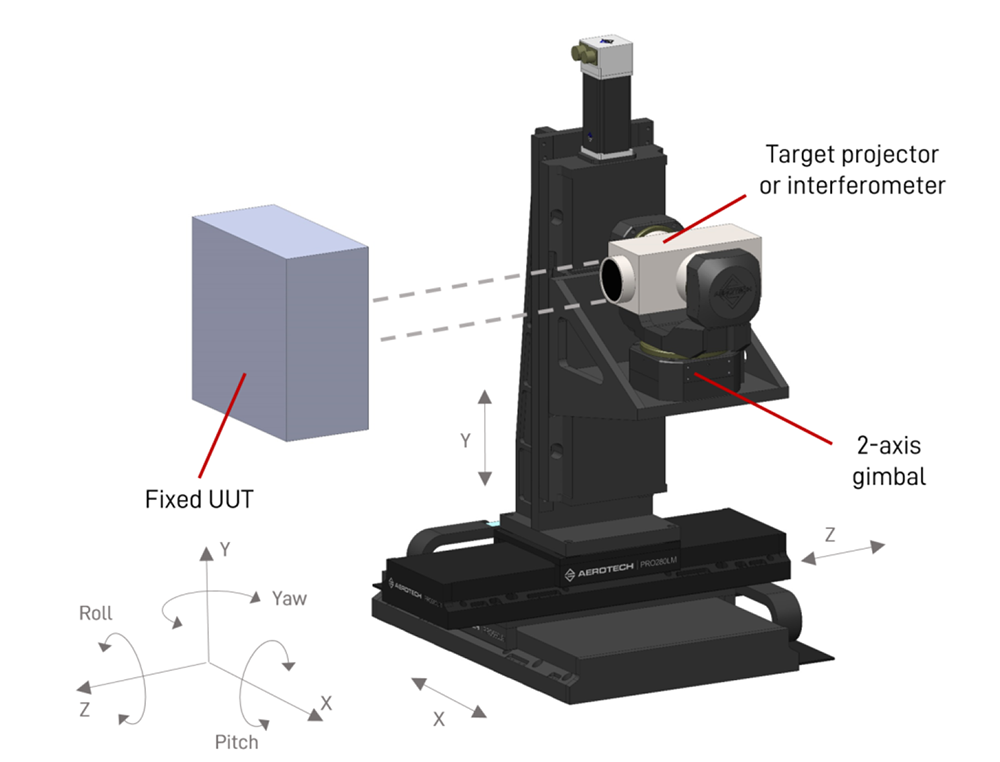
圖 6:固定待測物(UUT),測試設備在雙軸雲台及長行程線性 X、Y、Z 軸上移動。
圖 7 中的佈局展示了一個倒置的雲台安裝在 X、Y、Z 線性平台上,並承載著一個目標投影器,如果目標投影器需要移動到待測物(UUT)下方很遠的位置以覆蓋一個大的視場,那麼將雲台與目標投影器倒置是一個更優化的配置,一個類似的配置,可以用一個倒置的六足平台取代雲台,以提供微小運動與誤差校正能力。
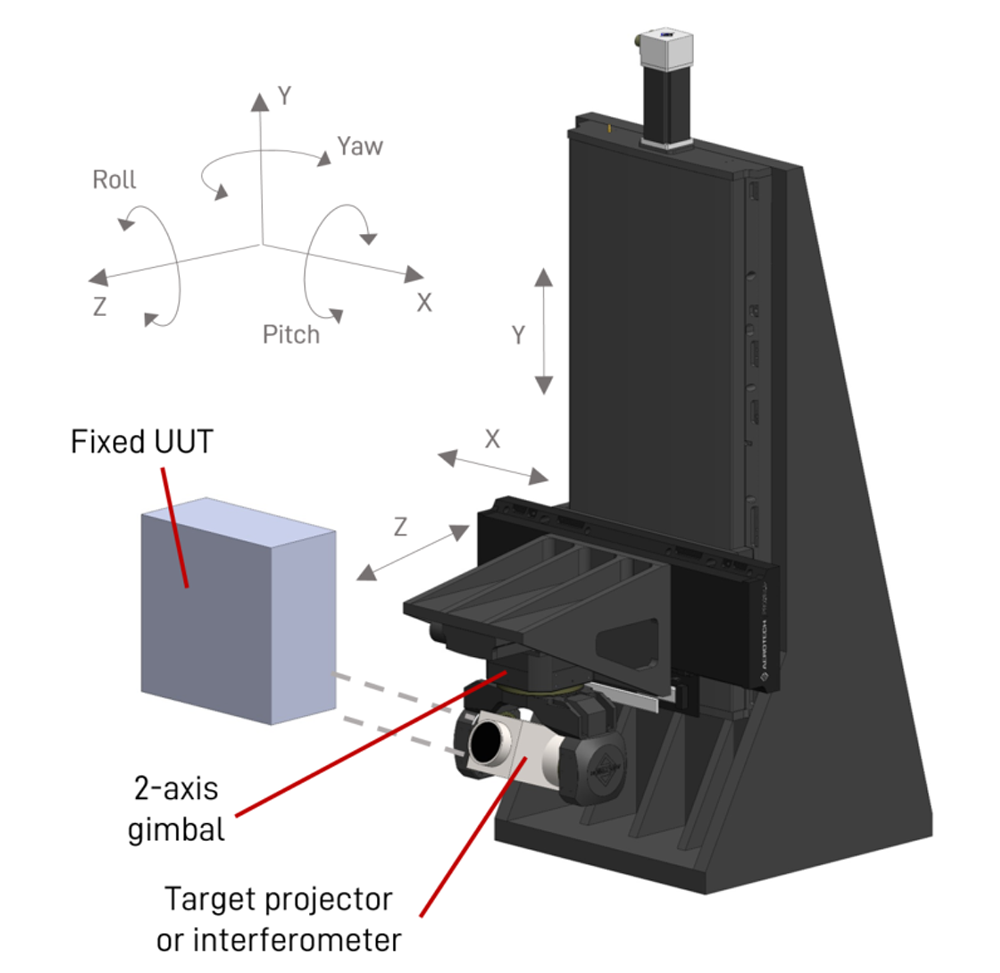
圖 7. 固定待測物(UUT),測試設備在倒置的雙軸雲台及長行程 X、Y、Z 軸上移動。
總結
本文總結了在測試光電(EO)系統時所使用的各種測試配置與佈局,如同大多數的工程決策,設計系統時必須權衡各種取捨。
關於作者

Tom Markel 是 Aerotech 的航太戰略客戶經理,負責全球最大航太製造商的業務開發與企業關係,作為一名擁有電機工程學位與軟體背景的運動控制工程師,Tom 在 Aerotech 服務超過 21 年,專門為自動化製造與測試設計高精度運動解決方案,包括 EO/IR 測試系統與戶外雲台系統,在加入 Aerotech 之前,Tom 在航太與國防產業擔任系統與測試工程師長達 13 年。
相關產品
光電測試儀器 (Santa Barbara Infrared - SBIR)
- 目標輪 (Target Wheels)
- 黑體輻射源 (Blackbody Calibration Sources)
- 動態紅外場景產生器 (Dynamic IR Scene Projectors)
- 準直儀紅外線測試系統 (STC Collimators)
- 同軸度校正模組 (Boresight Alignment Module)
- 紅外線測試自動化軟體 (IRWindows™)
精密運動平台 (Aerotech)
- 平衡環轉台 (Gimbals)
- 史都華六軸平台 (Hexapods)
- 運動控制龍門 (Gantries)
- 客製化運動平台 (Custom Motion Systems)
- 運動控制平台 (Motion Control Platform)