
MRTD測試技術深度解析:紅外線系統性能評估與創新方法白皮書
熱影像處理 (Thermal Image Processing) 技術,一種能夠將物體自身發出的紅外線輻射轉換為可視化影像的非接觸式探測手段,已從最初主要應用於專業領域,迅速擴展並深度滲透到眾多現代工業與科學研究乃至民生安全的關鍵環節。其基本原理在於,宇宙間所有溫度高於絕對零度的物體都會持續向外輻射紅外線能量,而熱影像系統(或稱紅外線熱像儀)正是透過高靈敏度的紅外線感測器陣列捕捉這些肉眼不可見的能量,再經過複雜的電子訊號處理、先進的影像處理演算法運算,最終以偽色彩或灰階圖像的形式,直觀地呈現出被測物體表面的溫度分佈狀況或指示潛在的熱異常特徵。
熱影像技術憑藉其獨特的優勢——如非接觸式遠距離探測、可視化大面積溫度場、在完全黑暗或煙霧、薄霧等惡劣視覺條件下仍能有效成像、以及能夠揭示設備早期潛在故障的熱特徵等——使其在以下諸多對精密探測與環境感知有著高度需求的產業領域中,展現出不可替代的戰略性價值與廣泛應用前景:
- 在軍事國防與公共安全領域,熱影像技術是構成現代化裝備與應急響應能力的基石,它被廣泛應用於:
- 夜視與全天候觀瞄系統:
為單兵、車輛、飛行器及艦船提供在黑夜、惡劣天氣(如雨、雪、霧)或戰場煙霧遮蔽下的清晰視野與目標鎖定能力。 - 情報、監視與偵察 (ISR):
透過無人機、偵察衛星或地面監視系統搭載的熱像儀,進行遠距離、隱蔽的目標探測、活動監控與態勢感知。 - 精確導引與武器系統:
作為導彈、精確制導炸彈等武器的末端導引頭,利用目標的熱特徵實現精準打擊。 - 搜救與反恐維穩:
在複雜環境(如災區、叢林、城市)中快速定位生命跡象(人體熱輻射)或隱藏的熱源(如引擎、火源)。 - 邊境巡邏與要地防衛:
實現對廣闊區域或敏感邊界的全天候入侵監測與早期預警。 這些應用對於提升作戰效能、保障人員安全、以及維護國家與公共利益至關重要,其核心需求在於卓越的探測距離、高解析度的目標識別能力、以及在複雜動態環境下的穩定可靠運作。
- 夜視與全天候觀瞄系統:
- 在尖端科學研究與產品研發 (R&D) 活動中,熱影像不僅是量測工具,更是洞察微觀熱現象、優化宏觀熱設計的利器,它被廣泛用於:
- 新材料熱特性表徵:
如複合材料、奈米材料、熱電材料等的導熱、散熱性能評估。 - 電子元件與複雜系統的熱設計驗證:
分析高功率晶片、印刷電路板 (PCB)、電池模組、乃至大型設備在運行時的熱分佈、熱流路徑與潛在熱點,以優化散熱設計,提升產品可靠性與壽命。 - 積體電路工作時的動態熱點分析:
在微米甚至奈米尺度上精確定位晶片內部因缺陷或高負載引起的異常發熱點,為失效分析與製程改進提供依據。 - 物理化學反應過程中的溫度動態監測:
例如催化反應、燃燒過程、相變過程等的原位溫度場可視化,為理解反應機理、優化反應條件提供直觀且精確的熱行為數據。 此領域的核心需求在於極高的溫度量測精度、優異的空間解析度(以分辨微小結構)以及快速的動態響應能力。
- 新材料熱特性表徵:
- 對於半導體產業這一技術密集型領域而言,從晶圓製造、封裝測試到最終的晶片在各類電子產品中的應用,熱影像技術在確保產品質量、提升製程良率與保障元件可靠性方面均扮演著日益關鍵的角色:
- 製程溫度均勻性監控:
例如在快速熱處理 (Rapid Thermal Processing, RTP)、化學氣相沉積 (CVD)、蝕刻等關鍵製程中,實時監測晶圓表面的溫度分佈,確保製程的高度均勻性。 - 缺陷篩檢與早期失效分析:
透過對工作狀態下晶片或封裝元件進行熱成像,可以快速定位因內部短路、漏電流、接觸不良等引起的微區過熱點,為早期失效預警與失效物理分析提供有力工具。 - 高功率半導體元件的散熱性能評估:
對於功率電晶體、LED、雷射二極體等高功率元件,其結溫的精確控制直接影響其性能與壽命,熱影像技術可提供非接觸式的精確結溫量測與熱阻分析。 半導體產業對熱影像技術的需求特點是高空間解析度(微米級)、高溫度解析度(mK級)、快速響應以及與自動化檢測設備的良好整合能力。
- 製程溫度均勻性監控:
- 在工業自動化與預防性維護領域,熱影像系統已成為保障生產連續性、提升設備可靠性與確保作業安全的標準配置:
- 關鍵設備狀態監測:
對生產線上的馬達、泵、壓縮機、軸承、齒輪箱、變壓器、開關櫃、管線等核心設備進行實時或定期的紅外線溫度掃描,能夠在設備發生嚴重故障前,及早發現因機械摩擦、電氣過載、接觸不良、絕緣劣化或流體洩漏等引起的異常溫升,從而實現預防突發性故障、優化維修排程、顯著降低非計畫性停機時間並保障生產安全。 - 品質控制與製程優化:
在諸如金屬焊接、玻璃製造、塑膠注塑、食品加工、熱處理等眾多工業製程中,對產品或模具的溫度進行精確監控與均勻性分析,是確保最終產品質量、優化製程參數的關鍵環節。 - 建築能效評估與設施安全:
用於檢測建築物外牆的保溫缺陷、屋頂滲漏、暖通空調系統的能量損失;以及在數據中心、石化廠等高風險場所進行早期火災隱患排查。 此領域應用通常要求熱像儀具有堅固耐用、操作簡便、良好的環境適應性以及能夠整合到現有監控系統或手持巡檢設備中的特點。
- 關鍵設備狀態監測:
此外,熱影像技術在消防搜救(穿透煙霧定位火源與被困人員)、醫療診斷(輔助檢測炎症、循環系統異常、體溫篩檢)、環境監測(追蹤熱污染、森林火災預警、野生動物普查)以及農業應用(作物健康狀況評估、灌溉均勻性分析)等諸多其他重要領域,也正發揮著越來越重要的作用。
推動熱影像技術應用範圍持續擴大並深化其價值的核心驅動力,不僅包括紅外線感測器與光學技術的持續突破(例如,空間解析度不斷提升、熱靈敏度NETD屢創新低、非致冷焦平面陣列技術的成熟與成本下降、以及多光譜/高光譜熱成像等新技術的出現),更源於各行各業對於提升運營效率、保障產品質量、強化安全預警、以及實現智能化決策的內在、迫切且不斷升級的需求。
熱影像系統的性能核心:挑戰、關鍵指標與精密測試之必要性
儘管熱影像技術的應用前景廣闊,但要充分發揮其潛力,確保所獲取熱影像資訊的準確性、可靠性與可詮釋性,則面臨著一系列技術挑戰;首先,實現精確的輻射溫度量測是熱影像技術的核心難點之一,這不僅要求紅外線熱像儀本身具有良好的校準,還需在使用過程中妥善考慮被測物體的發射率 (emissivity)、環境背景輻射的反射與吸收、大氣衰減以及觀測距離與角度等多重複雜因素的影響。
其次,熱影像的影像品質直接決定了其能否有效揭示細微的溫度差異或空間細節,這主要由兩大關鍵性能指標來衡量:空間解析度 (spatial resolution),即系統分辨被測目標上兩個相鄰細小點的能力;以及熱靈敏度 (thermal sensitivity),通常以雜訊等效溫差 (NETD) 來表徵,即系統能夠分辨出的最小可測量溫差;一個高性能的熱影像系統,必須在這兩個維度上均達到優異水平。
然而,僅憑單獨的NETD或空間解析度指標,尚不足以全面評估一個熱影像系統在實際應用中的綜合觀測效能,特別是當目標尺寸較小且溫差也較微弱時,為此,業界發展並廣泛採用最小可解析溫差 (MRTD) 這一綜合性性能指標。MRTD測試的獨特之處在於它將系統的熱靈敏度和空間解析度結合起來,透過人類觀察者對一系列不同空間頻率的標準四條槓目標板在不同溫差下的可辨識度進行主觀評價,從而得到一條能夠全面反映系統在不同空間細節層次上探測微弱溫差能力的特性曲線。MRTD不僅是紅外線熱像儀設計、製造與驗收的核心標準之一,也是預測其在特定應用場景下對目標探測距離與識別能力的關鍵依據。
要確保MRTD及其他關鍵性能指標量測結果的有效性與可比較性,嚴謹的實驗室校準與標準化的性能測試方法學至關重要。這就要求使用一系列高精度的紅外線測試與校準設備,例如:能夠提供極其穩定且均勻的已知溫度與輻射通量的黑體輻射源、用於模擬遠距離目標並精確定義空間頻率的紅外線準直儀、以及承載標準測試圖案的精密目標板等。唯有透過這些專業設備與標準化流程,才能對熱影像系統的真實性能進行客觀、全面的評估與驗證,從而為其在各個領域的成功應用奠定堅實基礎。接下來,我們將深入探討一種旨在提升MRTD測試效率與結果可靠性的創新方法。
精進熱影像系統性能評估:MRTD量測的替代方法與實證研究
最小可解析溫差 (MRTD) 測試是評估紅外線成像系統性能時,通常需要進行的關鍵測試之一,此測試綜合了系統的靈敏度與解析度量測,其最終目標是繪製一條曲線,該曲線表示觀察者能夠解析出特定空間頻率 (spatial frequency) 的目標時,所需的最小溫差。這條MRTD曲線將溫度與空間頻率的二維空間劃分為兩個區域:觀察者能夠解析目標影像的區域,以及無法解析的區域(如圖1所示)。
 圖1:MRTD 曲線示意圖,縱軸為溫差(Temperature),橫軸為空間頻率(spatial frequency)。曲線本身代表在各空間頻率下,人眼恰能分辨四條槓目標所需的最小溫差值,曲線以上為可解析區域,以下為不可解析區域。
圖1:MRTD 曲線示意圖,縱軸為溫差(Temperature),橫軸為空間頻率(spatial frequency)。曲線本身代表在各空間頻率下,人眼恰能分辨四條槓目標所需的最小溫差值,曲線以上為可解析區域,以下為不可解析區域。
值得注意的是,MRTD測試本質上是主觀的,這表示其最終結果依賴於一位經過訓練的人類觀察者來判斷特定的目標圖案是否可以被清晰分辨。這種主觀性雖然能夠反映成像系統在實際應用中被人眼感知的情形,但也可能引入觀察者間以及同一觀察者在不同時間的判讀差異,因此標準化的測試流程與明確的解析度判斷標準對於確保結果的可比較性至關重要。
傳統的MRTD測試配置通常包含以下幾個核心部分:待測的紅外線成像系統,即待測物 (UUT);一個標準的 四條槓目標板 (4-bar target),其槓條的寬度和間距定義了特定的空間頻率;以及一個光學系統(通常是高品質的紅外線準直儀 (Infrared Collimators)),用於將目標板的影像以平行光方式投射到待測物的入瞳處,從而精確地定義待測物所觀測到的目標空間頻率。
所謂的四條槓目標板,典型地是一塊具有良好熱傳導性的薄金屬片(例如銅或鋁),上面透過精密蝕刻或加工方式去除了四條等寬且等間距的平行槓狀區域,形成透光的狹縫。觀察者便是透過這些狹縫觀測到放置在目標板後方的溫控輻射源,這個輻射源通常是一個高精度、高穩定性的黑體校準源 (Blackbody Calibration Sources),其示意圖可參考圖2。
一套精密的溫度控制系統會獨立量測並設定此黑體輻射源的溫度,同時也會監控(或假定)目標板本身的溫度(通常接近環境溫度);如此一來,便可以在觀察者眼中呈現的槓狀區域(其輻射主要來自後方的黑體)與周圍的背景區域(其輻射主要來自目標板本身)之間,建立起一個精確可控的差分溫差 (ΔT),這個溫差的大小,可以由測試操作員或觀察者本人進行細微的調整。
傳統執行MRTD測試的方法,其典型流程是:操作員首先選定一個特定空間頻率的四條槓目標板,然後手動調整並設定黑體與目標板之間的溫差初始點(例如:從零溫差或一個較大的溫差開始),接著必須耐心等待黑體的溫度實際達到並穩定在該設定點(這可能需要數秒到數分鐘,取決於黑體的熱響應速度和溫控系統的性能)。在溫度穩定後,操作員再請觀察者仔細判斷當前溫差下,目標板上的四條槓是否能夠被清晰地分辨出來。如果可以,操作員可能會嘗試進一步減小溫差;如果不可以(或目標是逐漸從模糊變清晰),則可能需要增加溫差或記錄當前為「恰可分辨」的狀態。這個「調整溫差 -> 等待穩定 -> 觀察判斷」的循環過程會不斷重複,直到找到那個「最小」可解析溫差值。完成一個溫差點的判讀後,測試團隊才能記錄數據並準備進行下一個空間頻率目標或下一個溫差方向(例如從正溫差「白條」轉為負溫差「黑條」)的測試。
由於上述流程中包含了多次的溫度調整、漫長的等待時間(尤其是等待黑體溫度穩定)以及依賴人類觀察者進行主觀判斷並作出決策的環節,因此這種傳統方法與現代測試領域中普遍追求的客觀、自動化數據採集及高效分析流程相比,往往顯得極為耗時,常常構成整個紅外線系統測試與驗證流程中的主要瓶頸。
測試總時間的長短,主要受到以下幾個關鍵因素的制約:首先是黑體本身和目標板溫度的量測系統的反應速度和精度;其次是黑體在指令下改變溫度設定點後,其實際溫度變化速率,即每單位時間能改變多少溫度;再者是黑體輻射表面在達到新的設定溫度後,其整體表面達到高度溫度均勻分佈(即消除因快速溫變可能導致的局部熱點或冷點)所需的時間。除了這些與硬體相關的時間因素外,另一個至關重要的時間組成部分,則是人類觀察者在每個溫差點下,仔細觀察、判斷目標是否達到「可解析」標準並作出決策所需要的時間。
儘管現代先進的黑體控制器已經能夠實現非常快速且極其精確的溫度量測與控制,並且,一個典型的四條槓目標板在整個黑體輻射表面上所佔據的有效成像面積通常非常小,因此黑體局部表面達到溫度均勻狀態所需的時間也相對較短。然而,綜合來看,影響傳統MRTD測試時間最主要的兩個制約因素,依然是黑體在不同溫差設定點之間進行溫度轉換所需的時間(特別是當溫差變化範圍較大或黑體熱慣性較大時),以及操作員/觀察者在每個判斷點進行觀察、決策並與系統互動所需的時間。
為了有效縮短MRTD測試這一關鍵環節所需的時間,以應對日益增長的測試通量需求,一些實驗室已經投入了大量的資源和精力,並探索實施了多種旨在提升效率的改進措施。例如,一種常見的策略是配置多個高精度黑體,並將它們預先分別設定並穩定在測試過程中可能頻繁涉及到的幾個關鍵溫差點附近,當需要測試特定溫差時,可以快速切換到相應的預穩定黑體,從而省去單個黑體反覆升降溫並等待穩定的時間。另一種策略則是對測試方法學本身進行簡化或調整,例如,不再追求繪製完整的MRTD曲線,而是在預先選定的幾個關鍵空間頻率點上,僅針對若干個固定的溫差值進行「通過/不通過 (pass/fail)」的二元判斷標準。這些方法,雖然可能在一定程度上提升測試效率,並且在特定的生產線品質控制等情境下,能夠依據實際的生產需求(例如,每日需要測試的產品數量、可用的人力資源配置等)來實現較佳的成本效益,但它們的共同缺點是,通常無法對一個紅外線成像設備的MRTD性能進行完整而全面的特性描述,可能會遺漏某些關鍵頻率點的性能表現或無法精確捕捉到性能的細微變化。
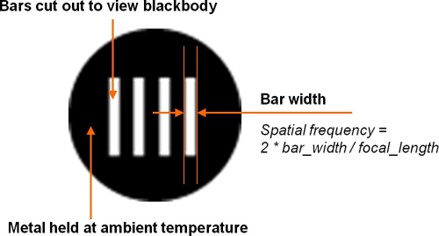
圖2:一個標準四條槓目標板的示意圖,它定義了特定的空間頻率,並利用其後方的黑體來設定觀察目標與背景之間的溫差。通常,目標板本身接近環境溫度,而黑體溫度則被精密控制以產生正溫差(目標亮)或負溫差(目標暗)。
一種替代的MRTD測試方法已經被討論並在某些實驗室中得到應用,此方法的核心是在黑體上建立一個固定的溫度變化速率,即讓黑體溫度(從而控制目標與背景之間的溫差)以一個預設的、穩定的速率(例如,每分鐘上升/下降 X Kelvin 或 X °C)進行線性掃描。這個溫度掃描的範圍通常會被設定為從一個已知遠低於預期解析閾值的起始溫差值開始(此時目標完全不可見),持續變化到一個將遠高於預期MRTD值的終點溫差值(此時目標應清晰可見)。在整個溫度掃描過程中,觀察者持續不斷地監測由待測物呈現的目標影像,其任務是在目標影像中的四條槓圖案恰好達到其主觀判斷的「完全清晰可辨」標準的那個精確瞬間,立即觸發一個外部事件(例如按下按鈕或腳踏板),該事件會指令測試系統即時記錄下該瞬間黑體與目標板之間的溫差值。
與傳統的手動調整方法類似,這個量測過程也需要分別針對正溫差(目標比背景亮,產生所謂的「白條」效果)和負溫差(目標比背景暗,產生所謂的「黑條」效果)進行。完成正負兩個方向的「恰可分辨」溫差點記錄後,取這兩個溫差值的絕對值的平均值,這個平均值即被定義為該特定空間頻率目標下所量測得到的MRTD值。這種方法的潛在優勢在於,它將傳統方法中多個「靜態調整-等待-判斷」的離散步驟,轉變為一個「動態掃描-即時判斷-瞬間記錄」的連續過程,有望大幅縮短測試時間。
SBIR (Santa Barbara Infrared) 作為業界領先的高性能、高精度紅外線測試設備製造商,其生產的大面積黑體系列產品,憑藉其卓越的溫度穩定性、均勻性和準確性,數十年來一直被全球眾多客戶成功地應用於傳統的MRTD量測任務中。近年來,為積極響應客戶對提升MRTD測試效率的迫切需求,SBIR正在為其廣受好評的 Infinity 系列黑體控制器引入一項名為「智慧升降溫」的選配功能。此「智慧升降溫」控制特點的核心價值在於,它允許測試操作員透過軟體界面精確設定黑體的溫度變化速率,更重要的是,系統能夠確保黑體在執行此速率變化的過程中,不僅溫度變化本身具有高度的線性度和準確性,而且整個黑體輻射表面在動態升降溫過程中仍能保持優良的溫度均勻性,這對於獲得可靠的MRTD結果至關重要;此功能的設計,明確地支援了前述那種依據等速升降溫(或溫度斜坡掃描)的替代MRTD測試方法學。
有鑑於此新興測試方法的潛力以及客戶的實際需求,SBIR 決定需要由內部研發與測試團隊親自進行一系列嚴謹的對比測試,目的是為了客觀評估這種採用等速升降溫的替代MRTD測試方法,相較於業界更為傳統和熟知的手動調整方法,在實際操作中的有效性如何。更進一步的目標是,透過這些實證研究,探索並制定出一套能夠在實際測試中最佳化地實現MRTD量測結果的準確性、可重複性以及測試整體速度的指導方針與關鍵參數設定(例如,不同空間頻率下最佳的升降溫速率選擇等)。據我們所知,迄今為止,學術界或產業界尚未見到有公開發表的、系統性地比較這兩種MRTD測試方法並報告相關實驗結果與操作參數建議的研究文獻。因此,本項研究可以視為SBIR在此一重要發展方向上所進行的初步探索,本文將呈現我們在此過程中獲得的初始研究結果與發現。
方法與設備
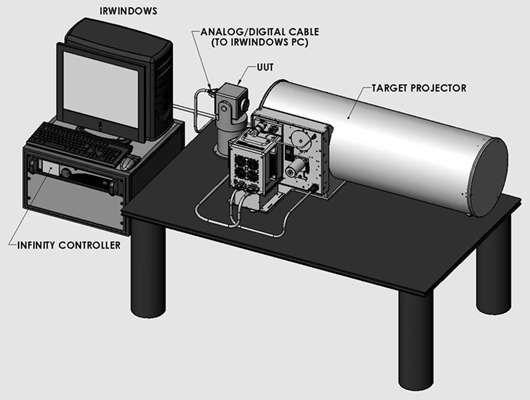
圖3:SBIR標準紅外線測試平台配置示意圖,展示了從目標投影系統(包含準直儀、目標輪、黑體)到待測物(UUT)以及後端電腦控制與數據擷取分析系統的典型連接方式和資訊流。
SBIR 內部擁有一套配置完善且標準化的測試平台,專門用於各類光電成像裝置的性能測試與特性分析(其典型配置如圖3所示),在此次MRTD研究中,核心的目標投影系統 (target projection system) 主要由以下幾個關鍵部分組成:一套高性能的準直光學鏡組 (collimating optics),其作用是將目標板的影像轉換為平行光束,模擬無窮遠處的目標,這對於正確評估成像系統的角解析度至關重要(奧創系統可提供各類高品質紅外線準直儀以滿足不同測試需求);一個可自動切換多個目標板的目標輪 (Target Wheel),用以方便快捷地改變測試所需的空間頻率;以及一個高精度黑體輻射源。整個系統的配置目的是將標準的四條槓目標板的紅外線影像,以特定的角尺寸和可控的溫差,精確地投射到待測物 (UUT) 的入光口。
在控制與數據流方面,黑體的溫度控制器透過標準介面與主控電腦相連接,使得測試軟體可以精密控制黑體的溫度設定點與升降溫速率。同時,待測物 (UUT) 的視訊輸出端則連接到一個專業的影像擷取裝置(例如高速影像卡或GigE視覺介面卡),該裝置同樣也與主控電腦相連。這種高度整合的配置,使得SBIR自主研發的 IRWindows測試軟體套件能夠實現對整個測試流程的集中控制與自動化操作:軟體不僅可以向黑體控制器下達指令、控制目標輪選擇特定的目標板,從而為待測物設定精確的測試條件(即目標空間頻率和溫差),同時還能同步觸發並擷取來自待測物的即時輸出影像。在影像擷取完成後,功能強大的 IRWindows套裝軟體還可以對所擷取的影像數據進行一系列複雜的分析處理(例如雜訊分析、對比度計算等),並最終計算出諸如MRTD在內的多項表徵待測物性能的關鍵指標。
在本項比較研究中,對於傳統MRTD測試的部分,我們使用了IRWindows測試軟體中內建的、符合業界慣例的手動MRTD測試程序模組。而為了充分利用並驗證SBIR Infinity系列黑體控制器新增的智慧升降溫 (Smart Slew) 功能的效能,研發團隊在IRWindows軟體框架內專門開發了一個全新的測試程序,我們稱之為等速升降溫MRTD (Slew MRTD) 測試程序,這個新程序被用於全面量測採用溫度斜坡掃描方法的MRTD測試性能,並與傳統手動方法進行比較,關於此等速升降溫MRTD演算法的具體實現細節,將在本節的末尾部分進行更詳細的描述。
實驗中所選用的準直儀具有 30 英寸的焦距 (focal length) 和一個 6 英寸的出瞳孔徑 (exit aperture),這樣的光學參數組合能夠為待測物提供一個清晰且視場適中的目標影像。與之搭配使用的黑體是一個 4 英寸有效輻射面積的Infinity系列大面積黑體,其溫度均勻性和穩定性均達到極高標準,在整個研究過程中,共使用了四個具有不同空間頻率的標準四條槓目標板,它們的具體特性參數(如槓條寬度及其對應的空間頻率)詳細列於下表1。
表1:研究中使用的目標板特性
步驟 (Step) |
條寬 (Bar Width) |
空間頻率 (Spatial Frequency) |
|
1 |
0.0565 |
0.2655 |
|
2 |
0.0440 |
0.3409 |
|
3 |
0.0283 |
0.5301 |
|
4 |
0.0208 |
0.7212 |
至於作為本次研究核心的待測物 (UUT),我們選用了一台由IR Cameras 生產的 IRC912 型紅外線攝影機,這是一款採用閉循環史特林致冷器 (closed cycle cooler) 的高性能中波紅外攝影機(奧創系統亦提供 紅外線攝影機 (IR Cameras) 以供客戶搭配),其核心感光元件是一個具有 1280x1024 像素解析度的 nBn 型焦平面陣列 (Focal Plane Array, FPA);該攝影機配備了一個焦距為 25 mm 的紅外鏡頭,在此光學配置下,經過計算,系統的有效奈奎斯特頻率 (Nyquist frequency)(即理論上能無混疊地解析出的最高空間頻率)約為 1.042 cyc/mrad。由於此款IRC912攝影機本身並未內建整合式的顯示螢幕,因此,在測試過程中,從攝影機數位擷取到的即時紅外線影像,會透過 IRWindows 測試軟體內建的影像檢視器功能,以正常的即時幀率(例如30Hz或60Hz)完整地顯示在主控電腦的高解析度螢幕上,供參與測試的觀察者進行即時的目標判讀。為了確保影像數據傳輸的穩定性與即時性,該攝影機採用了高速的 GigE 通訊介面與主控電腦連接,並且該GigE通道被專門指派給一個獨立的專用網路卡,這樣的配置可以最大限度地減少任何潛在的因網路擁塞或系統資源衝突可能導致的攝影機影像傳輸延遲,確保觀察者看到的影像是即時且流暢的。
本次研究共招募了三位觀察者參與主觀判讀測試。其中,兩位觀察者在測試開始前從未進行過任何MRTD測試,屬於無經驗的初學者;而第三位觀察者則在實驗室環境及外場條件下進行傳統手動MRTD測試方面,均具有相對豐富的實際操作經驗。這樣的觀察者組成有助於評估不同經驗水平對測試結果的影響。
手動MRTD演算法
對於測試序列中的每一個選定的四條槓目標板,均嚴格依照以下標準化的「手動MRTD」測試步驟順序執行:
- 初始設定:
首先,測試軟體會自動或由操作員手動選擇當前要測試的目標板(即特定的空間頻率),並指令黑體控制器將目標與背景之間的溫差(ΔT)設定為0度 Kelvin (或 °C),確保初始狀態下目標與背景之間沒有可感知的溫差。 - 正溫差測試(白條):
觀察者開始注視電腦顯示器上由待測物即時輸出的目標紅外線影像。同時,觀察者可以使用主控電腦鍵盤上的方向鍵(或其他預設控制方式)來逐步微調黑體的溫度,使得目標區域(即四條槓的透光部分,其輻射來自後方黑體)的溫度相對於周圍的目標背景板(其溫度通常接近環境溫度)為正值,在這種情況下,目標槓條會顯得比背景更「熱」或更「亮」,因此通常被稱為「白條 (white bars)」觀測模式。觀察者的任務是仔細調整溫差,直到找到一個最小的ΔT值。 - 記錄最小正溫差:
當觀察者主觀判斷,當前設定的溫差已達到能夠恰好清晰分辨出目標板上四條完整槓條的最小值時,便會選取測試軟體界面上的「接受」按鈕(此操作可透過鍵盤上的「A」鍵快捷執行,或使用滑鼠點擊顯示器上的虛擬按鈕),一旦「接受」,測試軟體便會自動記錄下此刻由黑體控制器回報的精確溫差值,此即為該空間頻率下的最小正溫差(MRTD_positive)。 - 溫差歸零重置:
完成正溫差記錄後,測試軟體會指令黑體控制器將溫差重新設定回0度 Kelvin (或 °C),準備進行負溫差測試。在此過程中,目標板(空間頻率)保持不變。 - 負溫差測試(黑條):
觀察者再次使用鍵盤上的方向鍵來調整黑體的溫度。然而,與前一步驟不同的是,這一次是將黑體的溫度設定為低於目標背景板的環境溫度,使得目標槓條區域看起來比周圍的背景更「冷」或更「暗」。這種觀測模式下呈現的槓條因此被稱為「黑條 (black bars)」。 - 記錄最小負溫差:
與正溫差測試類似,當觀察者判斷已找到能夠恰好清晰分辨出「黑條」的最小溫差絕對值時,再次選取「接受」按鈕,測試軟體隨即儲存此刻的溫差值(MRTD_negative)。至此,針對當前選定空間頻率目標板的一個完整MRTD量測週期(包含正負兩個方向)便告完成,測試系統可以自動或在操作員指令下更換到下一個空間頻率的目標板,重複上述所有步驟。
等速升降溫MRTD演算法
為了實現更高效的MRTD測試,研究團隊開發並採用了如下的「等速升降溫MRTD」演算法,其針對測試序列中每一個目標板的執行步驟如下:
- 初始設定:
與手動法類似,首先由測試軟體選定當前要測試的目標板,並指令黑體控制器將目標與背景之間的溫差(ΔT)設定為0度 Kelvin (或 °C)。 - 正溫差等速掃描(白條):
觀察者點擊測試軟體界面上的一個指定按鈕,該操作會觸發黑體控制器開始以一個預先設定好的、恆定的速率(例如 X K/min)使其溫度(從而改變ΔT)向正方向(即目標溫度高於背景溫度,形成「白條」)線性增加。值得注意的是,針對測試中使用的每一個不同空間頻率的目標板,實驗設計中均預先為其指定了一個特定的、可能最優化的溫差變化(升降溫)速率。 - 即時判斷並記錄最小正溫差:
在黑體溫度等速上升的過程中,觀察者持續注視電腦螢幕上由待測物即時輸出的目標影像。當觀察者主觀判斷,在某一瞬間目標板上的四條槓圖案恰好達到能夠被清晰分辨的程度時,立即選取測試軟體界面上的「接受」按鈕(同樣可透過鍵盤「A」鍵或滑鼠點擊操作)。測試軟體在接收到「接受」指令的瞬間,會立刻鎖定並記錄下由黑體控制器回報的當時精確的溫差值,此即為該空間頻率下的MRTD_positive(等速法)。 - 溫差歸零重置:
記錄下正溫差後,測試軟體會指令黑體控制器將溫差重新設定回0度 Kelvin (或 °C),目標板(空間頻率)在此過程中保持不變。 - 負溫差等速掃描(黑條):
觀察者點擊測試軟體界面上的另一個指定按鈕,觸發黑體控制器開始以預設速率使其溫度向負方向(即目標溫度低於背景溫度,形成「黑條」)線性降低。 - 即時判斷並記錄最小負溫差:
與正溫差掃描過程類似,在黑體溫度等速下降的過程中,當觀察者判斷在某一瞬間「黑條」圖案恰好達到可清晰分辨的程度並選取「接受」按鈕時,測試軟體會即時記錄下此刻的溫差值(MRTD_negative,等速法)。至此,針對當前選定空間頻率目標板的一個完整MRTD量測週期(等速法)便告完成,測試系統可以自動或在操作員指令下更換到下一個空間頻率的目標板,重複上述所有步驟。
量測過程
在所有正式的MRTD對比測試開始之前,參與實驗的三位觀察者均接受了由本研究的其中一位作者 (Jack Grigor,一位經驗豐富的紅外線測試工程師) 所主持的簡短但關鍵的培訓課程,培訓內容主要聚焦於兩種MRTD量測方法(傳統手動法與等速升降溫法)的標準操作流程、軟體介面使用、以及最重要的——在觀測目標影像時,如何一致地判斷目標的「可解析度」的標準,值得一提的是,這位擔任培訓師的作者本人並未作為觀察者參與後續的實際測試環節,以避免可能的引導性偏誤。在培訓過程中,所有觀察者共同討論並就本次實驗室內部測試達成了一致的「可解析度」判斷黃金標準,即:影像中的四條槓圖案必須能夠被清晰地、無歧義地區分開來,並且觀察者必須能夠自信地識別出構成這四條槓的總有效像素面積至少達到其理論總面積的75%,這個75%的標準有助於在一定程度上量化主觀感受,並減少因個別像素點的微弱顯現而導致的過早判斷。
整個MRTD對比測試的數據採集階段共持續了5天,為了使測試過程更貼近實際操作的靈活性,並可能在一定程度上平衡觀察者的疲勞度或操作習慣,研究設計允許觀察者們在測試期間,可以根據自己的偏好自由選擇是在「手動MRTD法」和「等速升降溫MRTD法」兩種測試之間交替進行(例如:完成一個目標的手動法測試後,接著對同一個目標或下一個目標進行等速升降溫法測試),或者是先集中完成一批某種類型的測試(例如,連續完成所有目標的手動法測試),然後再集中進行另一批其他類型的測試。實驗記錄表明,在實際測試過程中,這兩種操作模式(交替進行與批次進行)都被不同的觀察者所採用;然而,由於本研究的重點在於比較兩種MRTD方法本身的性能差異,而非探究測試順序或操作模式可能帶來的影響,因此這個「測試執行順序」的參數並未被納入最終的數據統計分析考量之中。
在每次測試運行期間,除了核心的、由觀察者在「接受」時刻所記錄下來的溫差數據 (MRTD) 之外,測試系統同時也精確地記錄了完成每一次完整MRTD測試(針對一個特定目標板,包含正負溫差兩個方向的量測)所花費的總時間。在整個數據採集過程中,僅有一次測試因為一個意外的外部干擾事件(例如,儀器臨時故障或操作環境的突然變化)而導致其執行時間受到了顯著的、非正常的影響,為了確保數據分析的公正性和有效性,該次測試的結果(包括溫差數據和時間數據)已從後續的所有統計分析中予以剔除。
結果分析
在為期5天的密集測試階段中,研究團隊總共成功完成了29次完整且有效的MRTD測試(每次測試均包含對預設的多個空間頻率目標板,採用指定方法進行量測)。為了評估量測結果的穩定性和一致性,針對每一位觀察者,研究人員分別計算了其在使用兩種不同MRTD方法(傳統手動法與等速升降溫法)時,在每一個測試的空間頻率點上所獲得的多個MRTD讀值的標準差,為了便於比較不同空間頻率和不同觀察者之間的變異程度,這些標準差隨後被轉換為相對於該觀察者在該空間頻率下所有MRTD平均讀值的百分比。詳細的標準差百分比數據分別呈現於表2(針對傳統手動MRTD法)和表3(針對等速升降溫MRTD法),將本研究中獲得的這些標準差數據與先前已公開發表的其他獨立MRTD研究文獻中的結果進行比較,可以發現,本次測試中所觀測到的MRTD數值變異程度(即標準差百分比)均落在業界公認的、MRTD測試方法本身固有的正常波動範圍之內,這一發現初步表明,本研究所採用的實驗設置、觀察者培訓以及數據採集流程是合理且符合行業標準的。
從表2和表3的數據中,我們可以進一步觀察到一個有趣的現象:從整體上看,量測結果的變異程度(即標準差百分比)在採用等速升降溫方法與傳統手動方法之間,並未顯示出某一種方法具有顯著的、系統性的優勢或劣勢,換言之,兩種方法在量測結果的離散度方面表現大致相當。具體來看,對於某些特定的觀察者而言,其在某些空間頻率點上使用等速升降溫法得到的MRTD讀值,其一致性(即標準差百分比)可能略遜於其使用手動法得到的結果;然而,對於同一位觀察者在其他不同的空間頻率點上,情況則可能正好相反,即等速升降溫法的結果表現出更好的一致性。在所有觀察者和所有空間頻率的數據中,唯一呈現出較為一致和明顯傾向的是:那位在測試開始前即具有豐富MRTD測試經驗的觀察者(編號為觀察者3),其在所有條件下的MRTD讀值所對應的標準差,均一致地且顯著地小於另外兩位先前未經相關測試訓練的觀察者,這一點符合一般預期,即經驗和訓練能夠提高主觀判讀的穩定性。
表2:手動MRTD法量測結果的標準差(以平均讀值之百分比表示)
觀察者 (Observer) |
0.02655 |
0.3409 |
0.5301 |
0.7212 |
|
1 |
18.7% |
21.3% |
11.6% |
11.3% |
|
2 |
22.2% |
13.7% |
20.9% |
11.0% |
|
3 |
10.0% |
10.4% |
7.5% |
7.0% |
表3:等速升降溫MRTD法量測結果的標準差(以平均讀值之百分比表示)
觀察者 (Observer) |
0.02655 |
0.3409 |
0.5301 |
0.7212 |
|
1 |
17.6% |
24.4% |
21.2% |
24.4% |
|
2 |
18.9% |
11.7% |
12.0% |
22.2% |
|
3 |
3.8% |
6.6% |
9.7% |
10.5% |
接下來一個值得深入探討的分析結果,是直接比較在相同測試條件下,基於傳統手動調整方法與基於新型等速升降溫方法所量測得到的MRTD數值本身是否存在系統性差異,為了進行這種比較,研究人員針對每一位觀察者和每一個空間頻率點,計算了其在兩種方法下所得MRTD值的平均數,然後用「等速升降溫法MRTD平均值」減去「手動法MRTD平均值」,再將所得的差值除以「手動法MRTD平均值」,從而得到一個百分比變化值。這個百分比變化值直觀地反映了從手動法轉換到等速升降溫法後,MRTD量測結果的相對變動情況。詳細的計算結果如表4所示。
表4:從手動量測MRTD值到等速升降溫量測MRTD值的百分比變化
觀察者 (Observer) |
0.02655 |
0.3409 |
0.5301 |
0.7212 |
|
1 |
11.9% |
15.4% |
13.1% |
23.1% |
|
2 |
0.8% |
13.8% |
8.7% |
22.3% |
|
3 |
4.3% |
9.3% |
0.1% |
11.2% |
仔細審視表4中的數據,儘管不同觀察者和不同空間頻率下的具體百分比變化數值各不相同,但總體上可以歸納出三個值得注意的普遍趨勢。首先,也是最為引人注目的一點,是幾乎所有的百分比變化值均為正值,這表示採用等速升降溫測試方法所得到的MRTD值,系統性地且明顯地高於採用傳統手動方法所得到的MRTD值。在整個數據集中,沒有觀察到任何負向的變化(即等速法結果低於手動法結果的情況),這一現象似乎強烈暗示,在等速升降溫的測試方法學中,從觀察者感知到目標影像達到可解析狀態並觸發確認的瞬間,到測試系統實際鎖定並記錄下該時刻對應的黑體溫差值之間,可能存在一個不可避免的延遲時間。這個延遲可能包含了觀察者自身的神經生理反應時間,以及測試系統(包括影像擷取、軟體處理及黑體溫度讀取)的響應延遲,在溫度持續變動的情況下,這樣的延遲會導致記錄下的溫差值略高於觀察者實際感知到目標可解析時的真實溫差值(在升溫過程中)或略低於(在降溫過程中),從而可能引入系統性的正向偏差。
第二個觀察到的可能趨勢是,這種由方法轉換引起的MRTD量測誤差(即等速法相對於手動法的增加量),在一定程度上似乎隨著目標空間頻率的增加而呈現增大的傾向,儘管這一趨勢在單一觀察者的各個空間頻率誤差值之間並非表現得完全一致和規律,但一個值得注意的共同點是,對於所有的觀察者而言,他們所記錄到的最大MRTD百分比誤差,幾乎都出現在本次測試所使用的最高空間頻率的目標板上。這一現象或許也與前述已指出的、可能的記錄延遲效應有關,因為更高空間頻率的目標本身就更難解析,觀察者可能需要更長的判讀時間或在更接近其感知極限的狀態下作出判斷,從而使得任何微小的延遲都可能被放大。
第三點值得注意的是,那位在測試前即具有MRTD測試經驗的觀察者(編號為觀察者3),其在使用兩種不同方法所進行的量測結果之間的差異,始終且一致地小於另外兩位無經驗的觀察者。造成這種差異的確切原因目前尚不完全明朗,但推測可能與該位經驗豐富的觀察者在整個量測分析過程中(如表2和表3所示)本身就表現出的較小的MRTD讀值標準差(即更高的判讀穩定性)有關。經驗豐富的觀察者可能對解析度標準的把握更為精確和穩定,反應也更為迅速和一致,從而減少了方法學轉換可能引入的額外變數。
最後一部分的數據分析,著眼於比較執行兩種不同MRTD測試方法時,在測試總時長方面的差異。所有29次有效測試的平均耗時、最大耗時、最小耗時以及耗時數據的標準差等統計結果,均詳細匯總於表5之中,從表中數據可以一目了然地看到,最為顯著的改進體現在整體測試執行時間的大幅縮短上:與傳統手動方法相比,採用等速升降溫方法平均能夠將測試時間縮短約25%。
然而,對時間數據進行更進一步的審視後可以發現,等速升降溫方法的優勢不僅僅在於平均時間的縮短,它同時也使得測試的執行時間變得更加一致和可預測。相比之下,傳統手動方法的測試時長表現出極大的個體差異和不確定性,最短的僅需不到6分鐘即可完成,而最長的則可能耗時超過20分鐘,波動範圍巨大。與此形成鮮明對比的是,採用等速升降溫方法進行測試時,其時長波動範圍則顯著收窄,所有測試均在6分鐘至不足10分鐘的區間內完成。這種測試時長的高度可預測性和一致性,對於實驗室的測試排程管理、資源分配以及成本控制而言,具有非常實際的工程價值。關於這一點的更深入討論,將在後續的結論部分展開。
表5:測試時長統計數據
統計項目 (Statistic) |
手動法 (Manual) |
等速升降溫法 (Slew) |
|
平均耗時 |
607 |
454 |
|
最大耗時 |
1241 |
590 |
|
最小耗時 |
350 |
358 |
|
標準差 |
168 |
64 |
|
相對平均值之偏差百分比 |
27.7% |
14.0% |
|
整體執行時間改善百分比 |
25.2% |
在所有客觀數據採集與分析完成之後,研究團隊還與三位參與測試的觀察者進行了非正式的訪談,以收集他們對於兩種測試方法在主觀操作體驗上的反饋。一個完全出乎研究團隊意料之外、但卻極具意義的發現是:所有三位觀察者均明確表示,在進行等速升降溫MRTD測試的過程中,他們所感受到的心理壓力水平顯著降低,他們普遍認為,等速升降溫測試方法所具有的那種程序步驟清晰、時間進程確定的特性,以及在每個升降溫步驟中,僅需在目標達到可解析瞬間做出一次性的、即時的解析度判斷決策,相較於傳統手動MRTD測試中,觀察者往往面臨無明確時間限制、且可能需要反覆多次進行解析度微調與判斷的決策過程,主觀感受上要更為輕鬆和易於掌握。儘管這一發現在最初的實驗設計中並未被預期到,但考量到MRTD測試結果的相當一部分是依賴於觀察者的主觀判斷,並且極易受到觀察者當時的生理及心理狀態(例如疲勞度、專注力、情緒等)的影響,因此,這一關於觀察者主觀體驗的積極反饋,無疑為評估等速升降溫MRTD方法的整體優越性增添了重要的砝碼。
MRTD研究之結論
需要明確的是,本項研究的初始目標並非試圖對等速升降溫MRTD (Slew MRTD) 測試方法進行一次全面且決定性的最終分析與評價,亦非在精確量化並確定此新方法相對於傳統方法所能提供的最佳化改進程度;更確切地說,我們進行這些初步的對比測試,其主要目的是為了對採用等速升降溫策略可能帶來的潛在改進效益有一個大致的了解和初步的評估,同時觀察在此過程中可能會出現哪些預期之外的問題或挑戰,並且,最重要的是,能夠根據實際執行測試的觀察者們所提供的直接反饋和寶貴意見,對我們正在開發的等速升降溫控制演算法本身進行持續的優化與改進。
基於上述目標,從本次的實驗結果來看,我們確實觀察到了採用等速升降溫方法在測試速度上所帶來的顯著提升,但坦誠而言,其提升的幅度(平均約25%)尚未達到我們在研究初期所樂觀預期的更高水平。儘管如此,平均25%的測試時間縮短,對於許多測試任務繁重的實驗室而言,已經是一個具有實際意義的改進,足以激勵我們投入更多資源,持續對此控制演算法進行更深度的開發與完善,但目前而言,尚不足以構成一個強有力的理由,號召所有紅外線測試領域的使用者立即全面採納此新方法,並取代現有的成熟測試流程。
針對未來進一步的研究與實施方向,我們目前規劃了幾條主要路徑。首先,參與本次測試的觀察者們已經針對測試軟體的使用者介面提出了一些非常有價值的改進建議,例如優化操作流程、提供更直觀的狀態顯示等,這些都將在後續版本中予以考慮和實現。其次,儘管目前MRTD量測結果的變異程度尚在可接受的預期範圍之內,但數據分析中觀察到的、等速升降溫法結果普遍偏高的現象,暗示了系統中可能存在的延遲問題。因此,深入研究並設法補償或消除這些延遲因素(無論是來自觀察者反應,還是系統自身響應),將有望進一步提高測試結果的可重複性和準確性。
總體而言,依據本階段研究的現有結果,我們的初步建議是:如果您的實驗室或生產單位計劃進行大量的MRTD測試(例如,每日需要測試多台設備,或對單台設備的多個狀態點進行重複測試),那麼,採用等速升降溫方法所能帶來的測試速度提升、測試總時長的高度確定性(有利於排程管理)以及對觀察者心理壓力的顯著降低(可能間接提升判讀質量與持續工作能力)等綜合優勢,都強烈推薦您考慮並導入此類方法。
然而,反過來說,如果您的測試需求僅限於偶爾進行小批量的MRTD測試,並且現有的內部測試程序已經相當成熟和穩定,那麼,僅僅為了追求約25%的速度提升,可能尚不足以完全抵銷重新開發、驗證並推廣一套全新的內部標準測試程序所需投入的成本與資源。最終的決策,仍需各應用單位根據自身的具體情況(如測試量、人力成本、對效率和一致性的要求、以及現有設備的兼容性等)進行權衡。
致謝
我們在此衷心感謝SBIR 的工程師 A. Dibble 和 E. Zakai,他們利用寶貴的個人時間自願擔任本次研究的觀察者,並在整個測試過程中,針對測試方法、操作程序以及軟體界面等方面,提供了大量極具價值的專業反饋和改進建議。他們的積極參與和無私奉獻,對本研究的順利完成和結果的可靠性做出了重要貢獻。
白皮書結論:引領精密測試技術,共創產業新局
本白皮書首先深入闡述了熱影像處理技術在全球軍事國防、尖端研發、半導體製造、工業自動化乃至更多新興領域中日益廣泛的應用及其不可替代的戰略價值,並點出了在這些多元應用中,實現高精度熱影像分析所面臨的性能評估與校準挑戰。隨後,核心技術章節聚焦於紅外線成像系統關鍵性能指標之一的最小可解析溫差 (MRTD),深度剖析了SBIR 在MRTD量測方法上的創新研究——即採用等速升降溫控制的替代方案。
透過詳實的實驗設計、多位觀察者的實際測試以及嚴謹的數據分析,該研究不僅客觀比較了新舊兩種MRTD測試方法在執行效率與量測結果上存在的差異,更突顯了新型等速升降溫方法在顯著縮短測試總時長、提高測試過程時間一致性與可預測性、以及有效降低觀察者在執行主觀判讀時的心理壓力等方面的綜合優勢。這些實證研究的發現,對於需要進行大量或高頻次紅外線成像系統性能評估的科研單位、生產企業及檢測機構而言,均具有重大的實際應用價值與方法學指導意義,並為整個熱影像精密測試領域的技術進步方向提供了有益的參考與啟示。
未來產業發展與技術需求
展望未來,隨著熱影像技術在各行各業的應用邊界持續拓展,例如在自動駕駛系統的全天候環境感知、智慧城市的公共安全監控與應急響應、精準醫療領域的早期無創診斷篩查、以及工業物聯網 (IIoT) 環境下的設備狀態智能監測與預測性維護等眾多新興且快速發展的應用場景中,市場對熱影像系統性能指標的精確評估、量化表徵與持續驗證的需求將更為迫切和多樣化。技術發展趨勢將持續推動紅外線感測器本身朝向更高空間解析度、更優異熱靈敏度(即更低的NETD值)、更寬廣的光譜響應範圍、更小的像元尺寸、更快的成像幀率以及更低的功耗與成本等方向不斷演進。與此同時,MRTD等綜合性能評估方法學本身也將不斷創新與完善,例如,透過引入更先進的人工智慧 (AI) 與機器學習輔助影像判讀演算法來最大限度地減少主觀人為因素的干擾、進一步提升測試效率與結果的一致性;開發能夠模擬更為複雜、動態且逼真的應用場景與多變環境條件的綜合測試平台;以及將關鍵性能測試更緊密地整合到產品生產線的在線品質控制與產品生命週期的持續性能監控與校準維護之中。這一切的進步與實現,都高度依賴於更為精密、穩定、可靠且智能化的紅外線測試與校準核心設備的支撐,正如SBIR 所研發的、具備先進高發射率塗層技術與精密溫度/速率控制能力的黑體校準源及其配套的完整測試系統。
奧創系統:您的專業系統整合與解決方案夥伴
面對上述日趨複雜且要求嚴苛的產業發展趨勢與對精密紅外線測試技術的殷切需求,選擇一個具備深厚技術積累、豐富實戰經驗且能提供全方位客製化服務的合作夥伴,對於企業能否成功導入並高效運用這些先進技術至關重要。奧創系統正是國際知名大廠如 SBIR (Santa Barbara Infrared) 等先進紅外線測試解決方案在台灣的專業系統整合商與緊密合作夥伴;我們深刻理解,尖端技術的價值實現,不僅僅取決於單一設備本身的卓越性能,更關鍵的在於如何將這些先進工具高效、可靠地整合到客戶既有的或全新的研發、生產與品管流程之中,使其真正服務於客戶的核心業務目標。
奧創系統的核心價值定位於一個經驗豐富、技術精湛的解決方案與系統整合提供者,我們專注於為客戶遴選、配置並整合出最優化的系統級解決方案;我們的專業技術團隊具備跨領域的知識背景與豐富的專案執行經驗,能夠深入剖析並理解您在高階研發(例如新材料熱特性分析、光電元件性能驗證)、半導體測試驗證(例如晶片級熱點偵測、封裝可靠性評估)、工業製程監控與自動化(例如產線溫度均勻性控制、設備預知保養),乃至其他精密紅外線測試應用領域所面臨的具體挑戰、瓶頸與未來發展目標。從初期的需求探索與技術可行性評估,到詳盡的系統架構設計與完整的整體解決方案規劃,奧創系統始終致力於根據您的獨特應用需求、預算考量以及期望達成的性能指標,提供高度客製化的專業服務與穩健可靠的系統建置、調試及確效。
我們所提供的解決方案,廣泛涵蓋了紅外線測試與精密校準領域所需的各類關鍵設備與系統,例如由SBIR等領先製造商所生產的、具備高穩定性與高均勻性的各型黑體校準源、用於產生平行紅外光束以模擬遠距離目標的精密光學紅外線準直儀、可實現多目標自動化切換的目標輪、整合上述組件以構成完整紅外場景模擬能力的紅外線目標投影系統,以及與之配套使用的高性能紅外線攝影機 和用於精密溫差量測的高精度差分溫度計等。
奧創系統不僅僅是這些高品質組件與系統的供應者,更重要的是,我們憑藉專業的整合能力與技術支援服務,協助客戶進行高效的系統整合、詳盡的操作使用培訓以及長期的維護保養與技術升級諮詢,確保您所投資的每一分都能充分發揮這些先進技術的潛在效益,從而顯著提升您的研發創新效率、產品質量控制水平以及整體市場競爭力。
針對本白皮書中所探討的各項產業應用與技術發展趨勢,奧創系統均能提供相應的技術諮詢、方案規劃與系統實施服務,竭誠協助您從容應對未來的技術挑戰,共創成功。