
直驅式與間接驅動式雲台:光電測試系統的運動致動器技術解析
作者:Tom Markel 航太戰略客戶經理
在當今高科技產業的激烈競爭中,從國防航太、半導體製造到自動駕駛,頂尖光電感測器的性能已成為決定產品優劣的關鍵,然而,一項產品的卓越性能,必須透過同樣卓越、甚至更為精準的測試系統來驗證;因此,選擇一套合適的運動定位平台,已不僅是實驗室的設備採購,更是直接影響研發效率、品管良率與最終產品市場競爭力的核心戰略決策;本文將深入剖析市場上主流的三種運動致動技術——直驅式雲台、間接驅動式雲台與多軸機械手臂,並解析其在「性能」、「成本」與「應用彈性」之間的權衡,旨在為所有致力於尖端技術開發的團隊,提供一個清晰的決策藍圖。
您的測試平台,是否已成為性能的隱形天花板?
研發人員的核心任務是追求數據的真實性與可再現性,並將產品的性能推向極致,然而,您是否意識到,隨著感測器技術以驚人的速度演進——解析度更高、反應速度更快、動態範圍更廣——那套過去被認為「夠用就好」的測試平台,正悄然成為限制您突破的瓶頸?您耗費數週追查的訊號雜訊,最終可能只是來自間接驅動齒輪的微小背隙 (backlash);產品在高速動態測試下無法達到宣稱的規格,問題根源或許並非感測器本身,而是測試台遲緩的動態響應;您的測試平台,是否已從得力助手,變成了限制您產品性能極限的「隱形天花板」?
因此,重新審視並選擇一個能匹配、甚至超越您待測物性能的運動平台,在今日已非單純的「設備升級選項」,而是確保您的研發成果不被埋沒、並在激烈技術競爭中立於不敗之地的「緊急必要之舉」。
雲台 (Gimbals)
雲台 (Gimbals) 是一種具備兩個或三個旋轉軸的裝置,其各旋轉軸相互垂直且交會於一點,雲台的結構通常採用直驅式或間接驅動式(例如齒輪或切線臂驅動)的旋轉軸設計,圖 1 分別展示了雙軸與三軸雲台的概念架構。
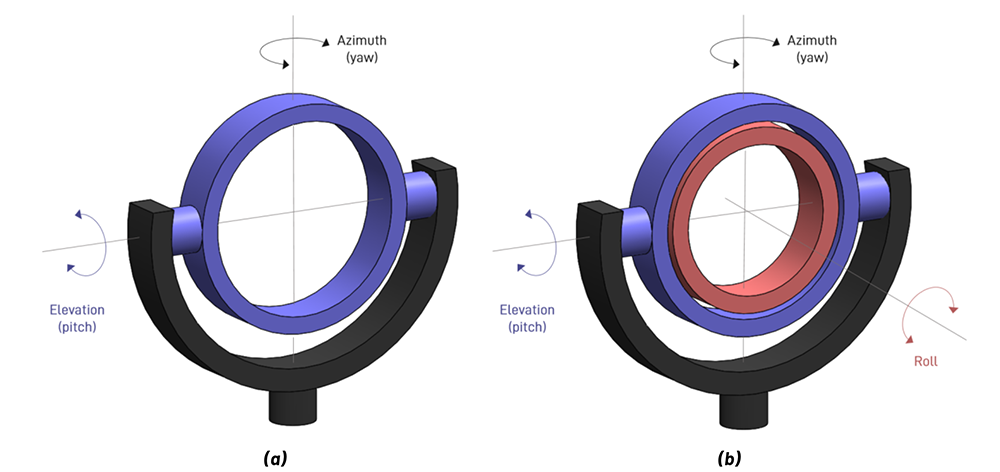
圖 1. (a) 雙軸雲台概念架構與 (b) 三軸雲台概念架構。
在 EO 測試應用中,雲台與多軸機械手臂皆可用於操控各式感測器、儀器或物件,因此,熟悉各種運動架構與組態,對於確定何種方案能滿足特定的應用需求至關重要,為 EO 測試選擇合適的致動器精密度,是確保系統性能足以有效檢測待測感測器的關鍵,精度固然重要,但工程師在為其 EO 測試應用選擇運動系統時,還必須權衡許多其他重要參數,例如,應評估運動系統的性能與尺寸及成本之間的關係,同時也應就尺寸、重量、整合複雜度、速度、工作週期、維護需求、初始採購價格及總體擁有成本等面向,對不同的運動系統解決方案進行比較。
直驅式雲台 (Gimbals)
直驅式雲台的設計,是將馬達直接連接至旋轉軸,其馬達與輸出旋轉軸之間沒有機械聯軸器或齒輪箱等傳動機構,在高精度的應用中,致動器通常利用光學編碼器、解角器 (Resolver) 或電感式回授來感測旋轉軸相對於固定外殼的位置,由於回授與驅動機制是直接耦合至輸出軸,此設計因此能實現高精密度與優異的動態性能,此外,由於驅動機制中沒有會產生機械磨損與摩擦的元件,致動器的可靠性與使用壽命也極高。
直驅式設計可同時採用機械軸承與空氣軸承兩種軸心,機械軸承對衝擊負載的耐受性較好,且通常具備較高的剛性,然而,與空氣軸承相比,其會產生些微的摩擦與較大的旋轉誤差運動,不過,無論採用何種軸承設計,只要搭配高解析度編碼器和低雜訊功率電子元件,透過直驅式機制皆可實現次微弧度(sub-microradian)等級的精密運動。

圖 2. Aerotech AMG200 直驅式雲台。
就精度與可重複性(repeatability)而言,直驅式雲台與旋轉定位器是最高性能的 EO 測試解決方案,並提供高加速度、低抖動追蹤與快速轉向能力,它們還具備長距離指向應用所需的微小步進運動能力,常用於將目標標定系統指向快速移動的物體、為慣性設備測試模擬運動,或是在雷射通訊應用中將望遠鏡指向衛星或其他遠距離物體,直驅式雲台可配置為雙軸或三軸運動,並能與線性平台結合,以涵蓋半球體的測試區域,如圖 3 所示的單側雲台,為 EO 感測器的方位角與滾轉測試能力提供了理想的配置,適用於飛彈尋標器或追蹤感測器等產品。
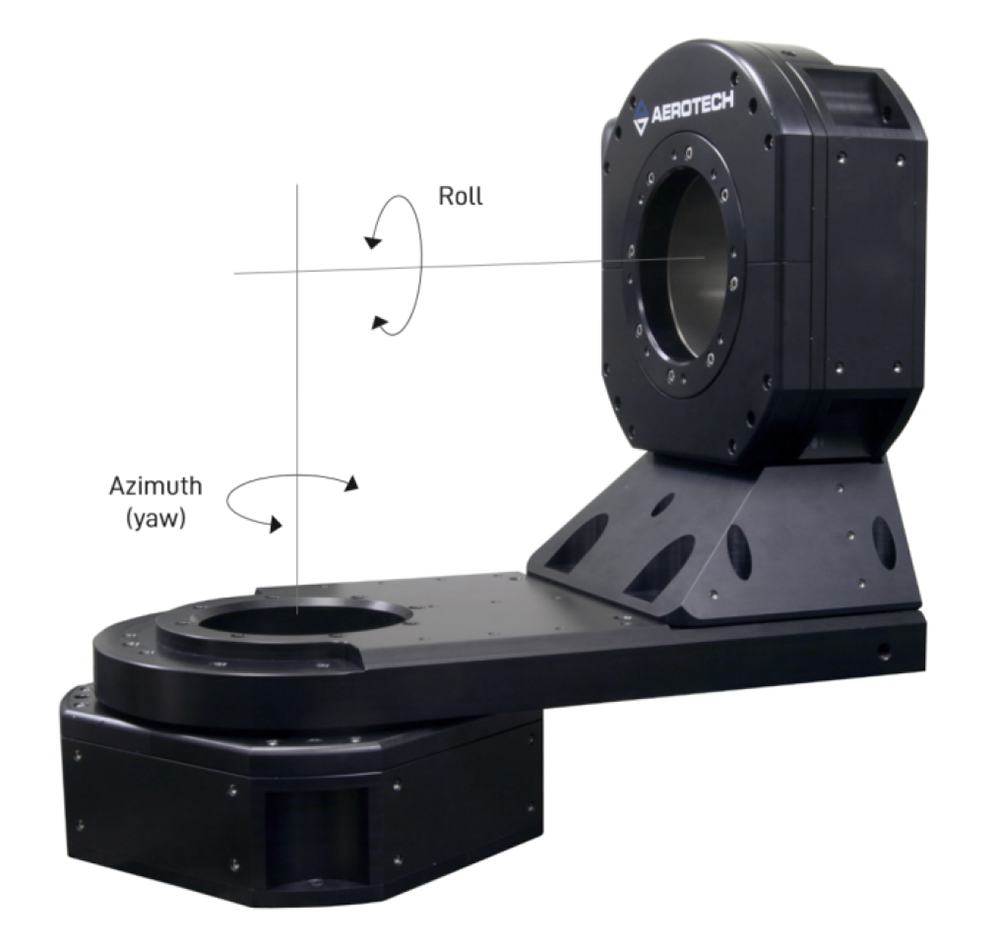
圖 3. 用於方位角與滾轉測試的單側雲台,其滾轉軸上的大孔徑允許酬載(飛彈或追蹤感測器)伸入其中。
單側雲台也可安裝反射鏡,如圖 4 的範例所示,這種方法省去了次級旋轉軸的支撐結構,有助於簡化設計並降低部分成本,然而,設計時必須謹慎,以確保其能滿足所需的動態性能與負載能力要求。
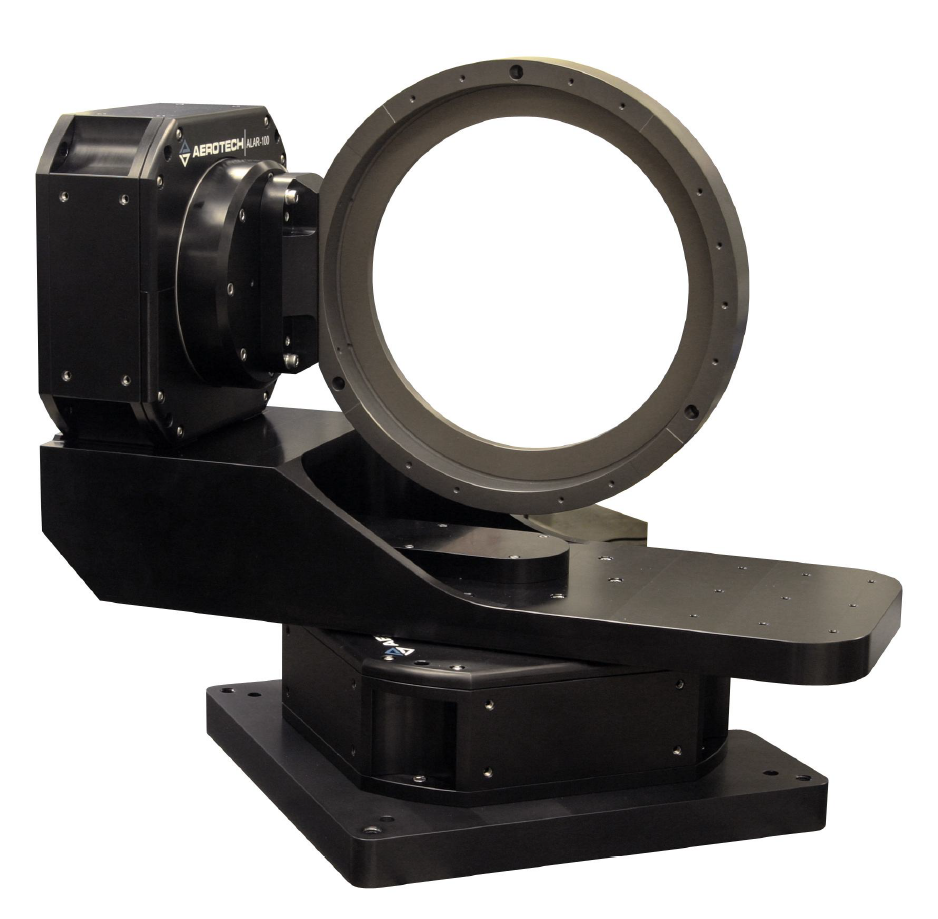
圖 4. 300 mm 孔徑單側反射鏡雲台。
直驅式雲台的增量運動步進可達 0.01 μrad,並能在 360 度行程範圍內,輕易實現優於 8 μrad 的雙向精度,而採用空氣軸承與特殊回授配置的高精度設計,更可在 360 度行程中達到優於 1 μrad 的精度。
透過適當的控制調整、功率電子元件與隔振措施,其定位抖動 (in-position jitter) 可達到奈米弧度(nanoradian)等級,此外,根據不同的設計與軸承配置,亦可輕易實現次微弧度與次微米等級的旋轉誤差運動。
對於實驗室與生產環境中的高效能、高工作週期之 EO 感測器測試應用而言,直驅式雲台是最理想的選擇。
間接驅動式雲台
間接驅動式雲台是利用機械連桿(例如齒輪箱或切線臂)來傳遞馬達動力至旋轉軸的設計,這類驅動方式犧牲了部分的性能,以換取機械結構的簡潔性與較低的成本,其常見的驅動方式可分為以下兩種。
齒輪驅動式雲台
當應用場景不要求快速轉向或低抖動運動時,齒輪驅動式定位器便是一個合適的選擇,齒輪系中存在的背隙 (backlash) 會影響雙向可重複性,雖然可以透過抗背隙機制來減緩此問題,但這麼做可能會增加驅動系統的剛性、慣性與成本,因此,這類驅動裝置不適用於需要連續運動的輪廓加工或追蹤應用,但非常適合用於速率控制或指定點移動 (slew-to-point) 的場合。
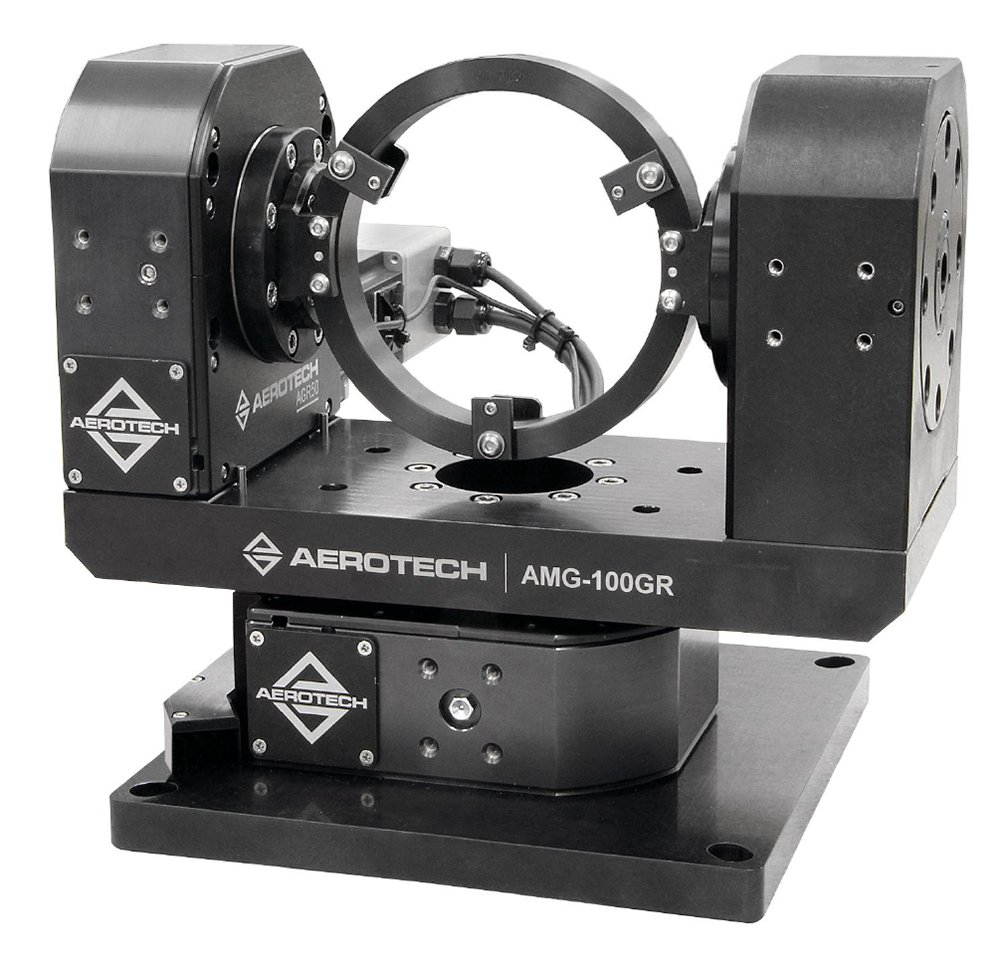
圖 5. Aerotech 的 AMG-GR 齒輪驅動式雲台。
切線臂驅動
如圖 6 的概念模型所示,切線臂 (Tangent Arm) 驅動是另一種類型的間接驅動機制,這類驅動器的運動範圍通常被限制在幾度之內,且其驅動剛性高於齒輪驅動器,切線臂驅動透過一個預壓的螺桿推動一個槓桿臂來旋轉平台,此設計完全消除了背隙,然而,其驅動解析度與螺桿的運動並非線性關係,因此需要透過控制器進行修正,市面上也存在結合不同驅動類型的混合式雲台,例如圖 7 所示的設計,其俯仰軸採用切線臂驅動,方位軸則採用直驅馬達,因此,對於俯仰軸動態性能要求不高的應用,這種混合設計便能有效節省成本。
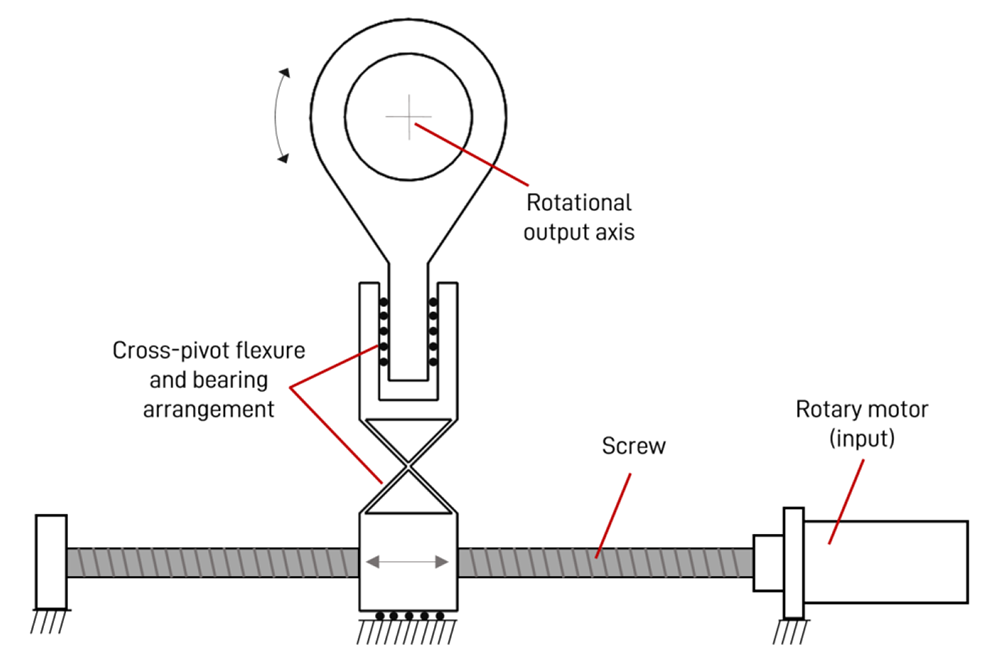
圖 6. 切線臂驅動旋轉平台概念模型。
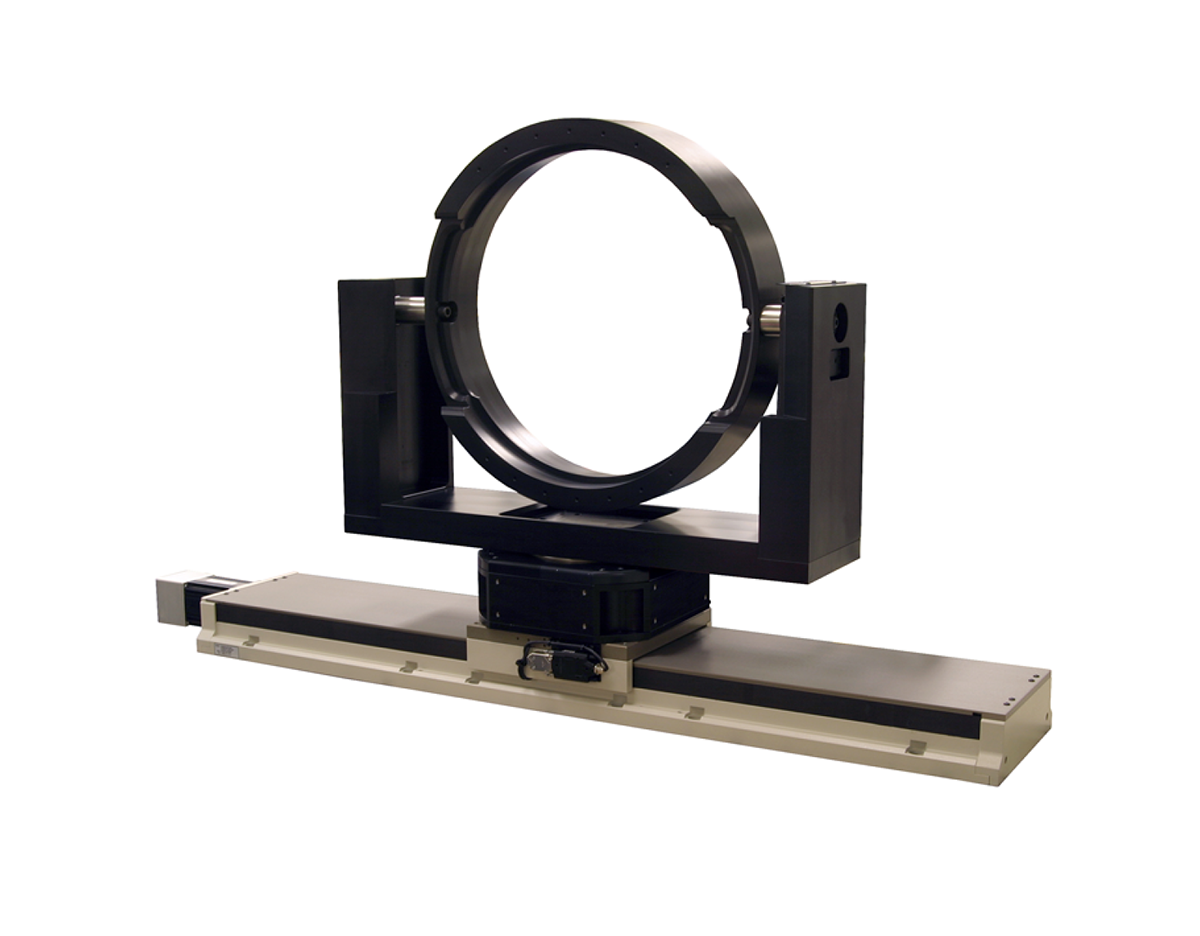
圖 7. 混合式雲台,其俯仰軸採用切線臂驅動,方位軸則為直驅式設計。
多軸機械手臂
多軸機械手臂,如圖 8 所示,由一系列的旋轉關節串聯而成,其中六軸機械手臂是相當常見的配置,這類機械手臂具備極大的運動範圍,能夠將酬載定向至多種不同的角度,然而,由於其串聯式的運動架構會導致誤差累積,因此精度不如雲台,且其剛性與頻寬也較低,多軸機械手臂通常應用於物料搬運的場合,但如果精度與動態性能的要求不是非常嚴苛,它們也適用於某些 EO 測試應用。

圖 8. 多軸機械手臂範例。
總結
下列表格總結了直驅式雲台、間接驅動式雲台與多軸機械手臂的比較,在選擇運動系統前,充分理解測試需求至關重要,對於要求最高精度、精密度與動態性能的應用,直驅式雲台是最佳選擇;如果成本是首要考量,且應用不要求高動態性能,那麼間接驅動式雲台或許是個不錯的方案;而對於需要大範圍運動且對精度要求較低的應用,多軸機械手臂則是一個合適的解決方案,強烈建議諮詢經驗豐富的應用工程師,以協助選擇最符合需求的技術。
表 1. 用於光電測試的各種運動致動技術質化摘要比較(★★★★ = 較佳,★ = 較差)
特性 |
直驅式 |
齒輪驅動 |
切線臂 |
多軸機械手臂 |
|
精度 |
★★★★ |
★★★ |
★★★ |
★ |
|
可重複性 |
★★★★ |
★★★ |
★★★ |
★ |
|
微小步進能力 |
★★★★ |
★★ |
★★★★ |
★ |
|
速度/加速度 |
★★★★ |
★★ |
★ |
★★★ |
|
適用於不平衡負載 |
★ |
★★★★ |
★★★ |
★★ |
|
行程/工作範圍 |
★★★ |
★★★ |
★ |
★★★★ |
|
初始成本 |
★ |
★★★ |
★★ |
★★★★ |
|
總體擁有成本 |
★★★★ |
★★ |
★★ |
★★ |
如同大多數的工程決策,系統設計過程中必須權衡各種利弊得失,掌握了這些資訊後,便能為新的測試應用評估出最佳的運動致動策略,並在與運動控制及自動化供應商討論各種方案時,做出更明智的決策。
關於作者

Tom Markel 現為 Aerotech 的航太戰略客戶經理,負責全球頂尖航太製造商的業務開發與合作夥伴關係,Tom Markel 是一名擁有電機工程學位與軟體背景的運動控制工程師,在 Aerotech服務超過 21 年,專門為自動化製造與測試設計高精度運動解決方案,其中包括光電/紅外線(EO/IR)測試系統與戶外型雲台系統;在加入 Aerotech 之前,Tom 曾在航太與國防產業擔任系統暨測試工程師達 13 年之久。
相關產品
延伸閱讀
- 多軸運動系統誤差預算分析 | 精密定位的系統級誤差評估與最小化策略
- 定位抖動的終極挑戰:三大平台實測,見證 Automation1 如何以 5 倍穩定性提升,碾壓前代效能!
- Aerotech 增強型追蹤控制 (ETC) 與動態增益排程:縮短整定時間、降低動態追蹤誤差的伺服控制技術
- IRWindows 攜手NV-IPM 革新光電系統性能評估模式
- 位置同步輸出 (PSO) | 依據移動距離實現高精度製程觸發控制
- 標準與客製化運動控制解決方案:採購流程的七大考量因素