
複雜運動,簡單控制
Aerotech Automation1 運動控制平台,讓最複雜的運動系統也能簡單控制;從 Machine Setup(機台設置)配置工具、EasyTune™(簡易調諧)馬達調諧,到設置清單與其他輔助模組,Aerotech 確保即使是運動控制的新手,也能正確完成設置;平台的整合開發環境(IDE)具備智慧自動完成、程式碼片段和即時語法錯誤報告等功能,充分滿足當代工程師的需求。
解決最嚴苛的機台控制挑戰
Automation1-iSMC 智慧軟體運動控制器,專為解決您最棘手的精密運動與自動化挑戰而生,控制器核心可以部署在工業電腦(PC)或整合至運動驅動器中,提供靈活的架構選擇。
功能分類 |
Automation1 平台 |
舊有平台 |
|
開發 |
Automation1 MDK (運動控制開發套件), Automation1 MachineApps |
Motion Composer Suite |
|
控制 |
Automation1 iSMC (智慧軟體式機台與運動控制器) |
A3200 Software-Based Machine Controller |
|
驅動 |
伺服馬達 – A3200, Ensemble, Soloist, 振鏡掃描頭 – A3200, 壓電 – A3200, Ensemble, Hexapod – A3200 |
|
|
連接 |
HyperWire®, Sockets Interface |
IEEE-1394/FireWire – A3200, AeroNet – Ensemble |
*Hexapod 可由伺服馬達驅動器控制。
機台整合與控制的痛點
您是否正遭遇以下問題:
- 整合困難:
「我們為了兜一個系統,用了A家的控制器、B家的驅動器、C家的振鏡卡,光是讓它們彼此溝通就搞瘋了。」 - 精度不足:
「我們的機械結構已經做到最好了,但產品良率就是上不去,誤差到底從哪來?」 - 產能瓶頸:
「我們的加工時間都浪費在運動的啟動、停止和整定延遲上,設備的稼動率很低。」 - 開發緩慢:
「每開發一台新機台,軟體都要耗費大量人力重寫,上市時程一再拖延。」
Automation1 平台
Automation1 平台 不只是一個運動控制器,而是一套完整的生態系統,目的在解決高階精密製造的核心挑戰,重點可以歸納為四大項:
- 高度整合,極致簡化:
將過去需要多個品牌、多套軟體才能實現的功能(伺服、振鏡、壓電、六軸平台),全部統一在一個軟體平台、一套開發工具下,這大幅降低了開發的複雜度和時間成本。 - 頂尖性能,追求完美:
它不是在做「會動」的控制,而是在做「完美運動」,透過3D誤差補償、雙迴路控制、S曲線加減速等演算法,修正機械本身無法避免的誤差,將精度和穩定性推向物理極限。 - 製程導向,深度融合:
功能設計緊扣實際加工應用,例如 PSO (位置同步輸出) 讓雷射觸發與運動路徑完美同步,類比功率控制 則讓雷射能量隨速度動態變化。它想的不只是「走到位」,而是「在完美的運動中,完成完美的加工」。 - 強大彈性,支援客製:
無論是標準的龍門,還是複雜的六軸或客製化機械手臂,平台的運動學轉換 (Kinematics) 核心都能應對,讓客戶的創新想法得以實現。
Automation1 賦能
賦予強大的能力,同時從繁瑣、重複性的工作中解放出來。
- 開發體驗極佳:
- 統一的開發環境 (IDE): 一個軟體搞定所有事,不用再切換不同品牌的工具。
- 智慧程式碼輔助: 自動完成、語法檢查等功能,寫起程式來更爽快、更不容易出錯。
- 豐富的函式庫: 大量成熟的功能模組(如刀具補償、電子凸輪)可以直接調用,不用自己造輪子。
- 解決棘手問題的能力:
- 除錯與調校變簡單: 「EasyTune」和各種分析工具,讓馬達調校不再是「玄學」。
- 機械誤差不再是惡夢: 「雙迴路控制」能讓工程師清楚看到馬達端與負載端的誤差,精準定位問題,「誤差補償」功能則能讓軟體修正硬體缺陷。
- 演算法深度足夠: PIDFF 控制迴路提供了前饋 (Feedforward) 功能,讓伺服響應更快、循跡誤差更小,這是控制內行人都懂的硬核技術。
- 高度的靈活性與掌控力:
- 硬體選擇自由: 不綁定特定馬達或感測器,支援從一般編碼器到雷射干涉儀等各種回授裝置。
- 安全防護到位: 「安全區」和「軟硬體極限」設定,讓他們在測試和開發時更有信心,不怕撞機。
標準控制器功能
Automation1 平台內建一系列強大的標準功能,重點在提供無與倫比的運動精度、流暢度與加工效率。這些功能從根本上簡化了複雜運動輪廓的程式設計與執行。
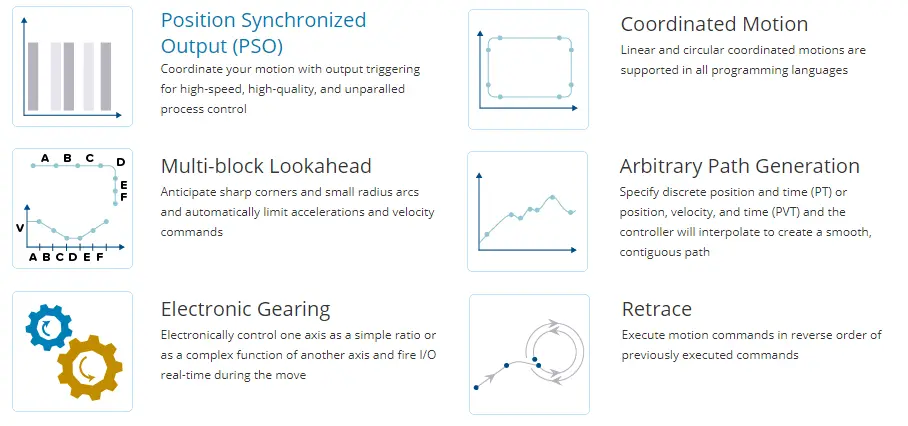
控制器內建豐富的標準功能,涵蓋從高精度同步觸發(PSO)、多軸協調運動到智慧路徑規劃。
平台亦包含針對特定應用的進階功能,如確保加工速率恆定的速度剖面控制、刀具補償與虛擬主軸點等。
基礎運動與路徑優化
定義運動的基本要素,並透過智慧演算法確保路徑的平順與高效。
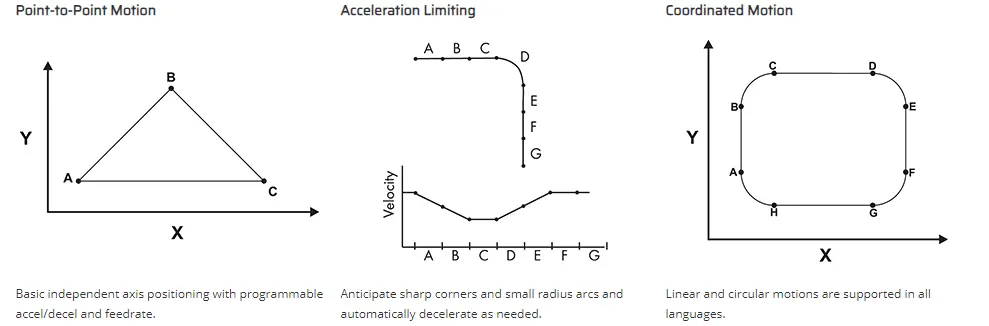
左上至右下依序為:點對點運動、加速度限制、協調運動,這些是實現任何運動任務的基礎
- 協調運動 (Coordinated Motion):
完美協調多個軸向,執行平滑的直線與圓弧運動,是複雜輪廓加工的基礎。 - 點對點運動 (Point-to-Point Motion):
基礎的獨立軸定位,可程式化設定加減速與進給率。 - 加速度限制 (Acceleration Limiting):
控制器能預判尖角與小圓弧,並自動減速,以確保運動平穩、避免機械應力。
進階路徑產生與即時控制
提供更高的路徑自訂彈性,並能在運動中即時調整與同步。
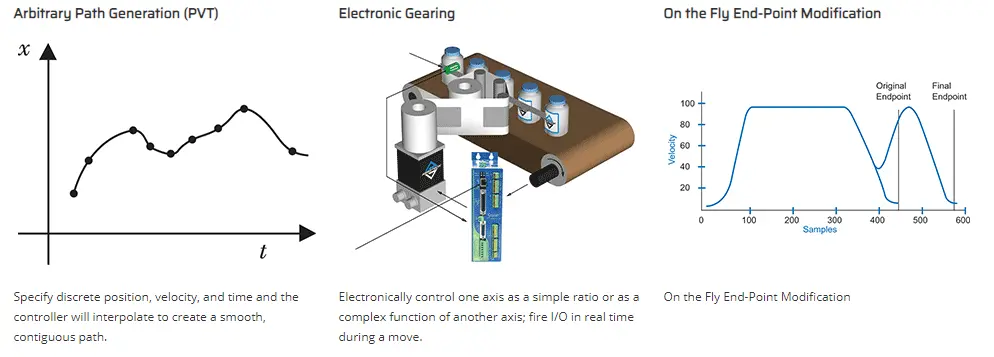
左至右為:任意路徑產生 (PVT)、電子齒輪、運動中終點修改。這些功能實現了高度自訂化與即時反應能力。
- 任意路徑產生 (Arbitrary Path Generation - PVT):
僅需指定一系列的位置、速度和時間點,控制器即可內插產生平滑、連續的複雜運動軌跡。 - 電子齒輪 (Electronic Gearing):
讓一個軸(從動軸)的運動與另一軸(主動軸)建立函數關係,實現精密的同步應用,如輸送帶上的「飛剪」作業。 - 運動中終點修改 (On the Fly End-Point Modification):
無需停止當前運動,即可動態更新終點目標,控制器將自動重新規劃平滑路徑。
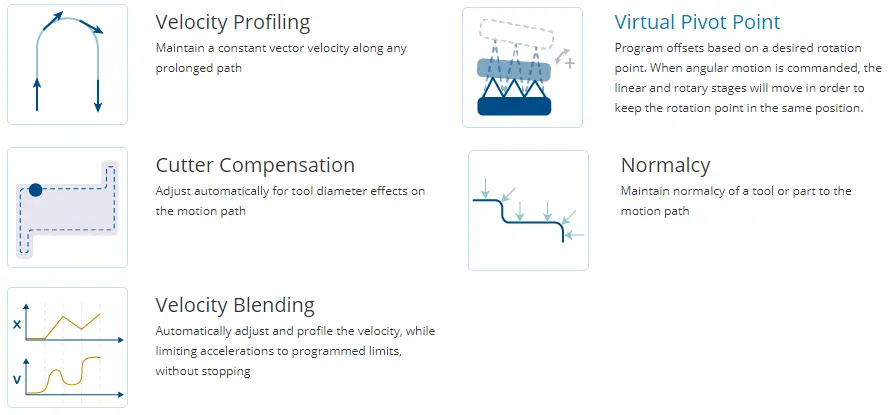
加工輔助與向量速度控制
針對精密加工應用提供專用優化,確保加工品質的一致性。
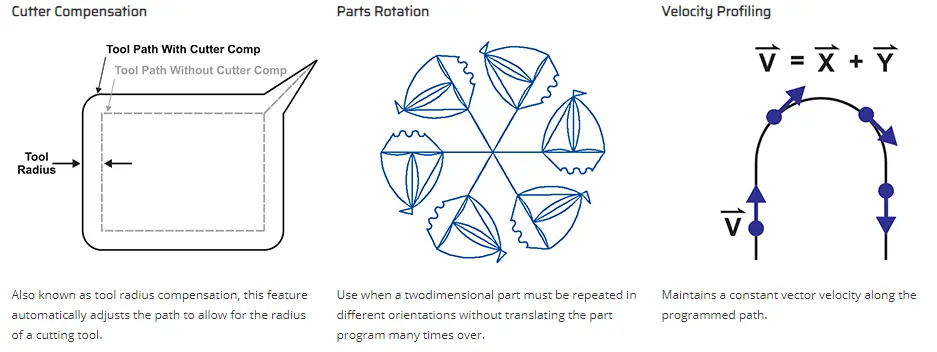
左至右為:刀具補償、零件旋轉、速度剖面控制。專為提升加工精度與簡化編程而設計。
- 刀具補償 (Cutter Compensation):
自動調整刀具中心路徑,以補償刀具的實際半徑,確保加工輪廓的準確性。 - 零件旋轉 (Parts Rotation):
在不同角度與位置重複加工同一圖案時,無需重複編程,大幅提升效率。 - 速度剖面控制 (Velocity Profiling):
在整個運動路徑(含曲線)上維持恆定的向量速度,對於雷射功率控制或塗膠等速率敏感的製程至關重要。
S型加減速與高速事件捕捉
進一步優化運動的平順性,並實現與外部事件的奈秒級同步。
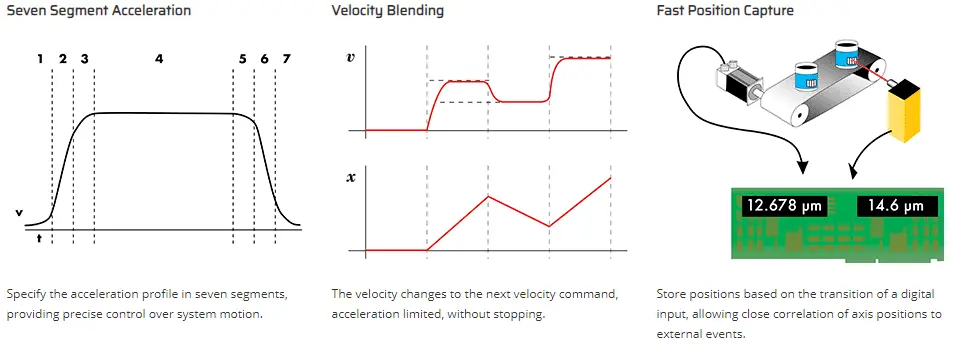
左至右為:七段式S曲線加減速、速度混合、高速位置捕捉。這些功能旨在實現更平順的運動與精確的事件同步。
- 七段式加減速 (Seven Segment Acceleration):
採用S曲線(S-Curve)進行加減速規劃,可大幅減少衝擊(Jerk),實現更平穩的啟動與停止,保護精密機械結構。 - 速度混合 (Velocity Blending):
在連續的運動指令之間,控制器會自動規劃平滑的速度過渡,避免不必要的停頓,最大化運動效率。 - 高速位置捕捉 (Fast Position Capture):
根據外部數位訊號(如感測器)觸發的瞬間,以極高精度鎖存當前軸向位置,是高精度檢測與觸發應用的關鍵。
路徑控制與高速同步應用
提供靈活的路徑執行選項,並支援高速視覺標定。
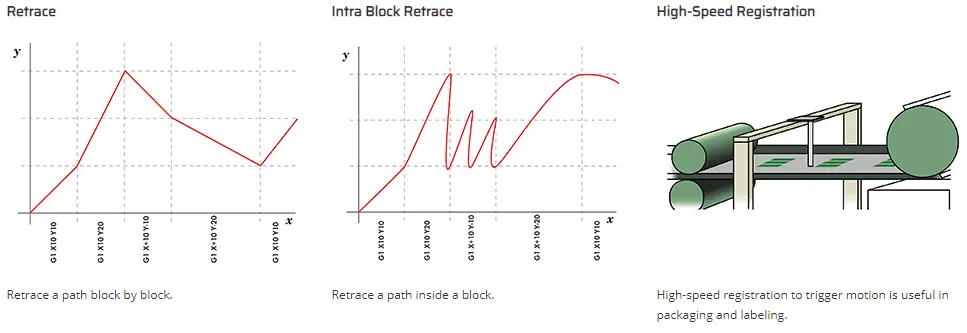
左至右為:路徑重跑、塊內路徑重跑、高速同步標定,提供靈活的路徑回溯與高速觸發功能。
- 路徑重跑 (Retrace):
可讓運動系統沿著已執行的路徑原路返回,適用於重複加工或檢測。 - 高速同步標定 (High-Speed Registration):
常用於包裝與標籤行業,系統利用感測器捕捉連續移動材料上的標記,並同步觸發後續加工動作。
特殊結構控制與製程功率調節
支援複雜的機械結構,並將運動與製程參數緊密結合。
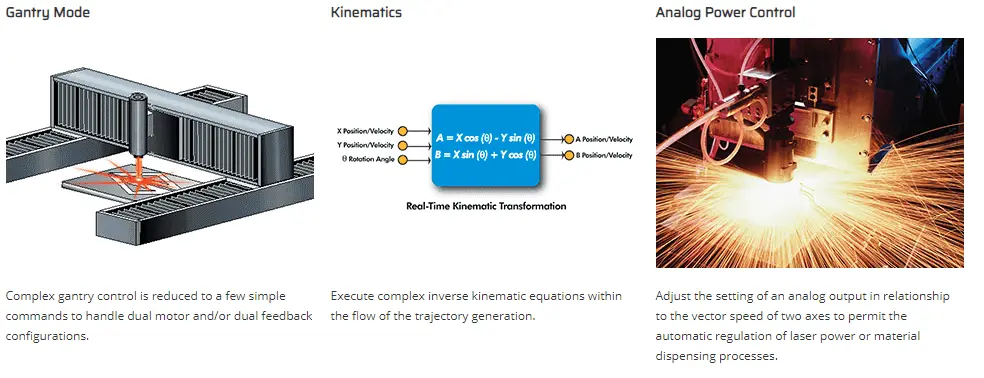
左至右為:龍門模式、運動學轉換、類比功率控制,簡化複雜機械結構的控制,並與製程深度整合。
- 龍門模式 (Gantry Mode):
將驅動大型龍門橫樑的兩個獨立馬達,作為單一虛擬軸進行精確同步控制,防止結構歪斜。 - 運動學轉換 (Kinematics):
即時執行逆運動學轉換,將使用者在笛卡爾座標系下的簡單指令,轉換為非線性結構(如Hexapod或機械手臂)各關節所需的運動。 - 類比功率控制 (Analog Power Control):
根據即時的向量速度來自動調節雷射功率或膠閥開度,確保在變速運動中也能獲得一致的加工品質。
協調控制 (Coordinated Control)
Aerotech 的控制技術可以協調和同步多達32個運動軸,無論其採用何種運動技術,都能達到次微秒級的伺服迴路同步和次毫秒級的路徑軌跡規劃。這種所有運動軸之間的緊密同步,帶來了更高精度的加工和更快的製程產出。
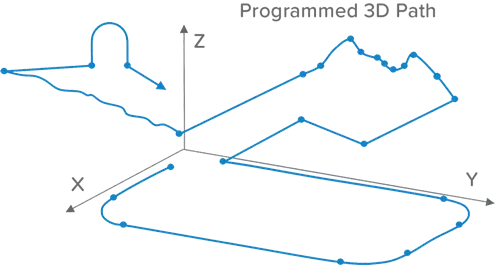
Figure 1. 複雜的3D運動路徑範例
以下是 Aerotech 控制器中實現協調與同步功能的特色範例:
系統校準與誤差補償
沒有完美的機械系統,但透過 Aerotech先進的演算法,可以使其達到近乎完美的精度。
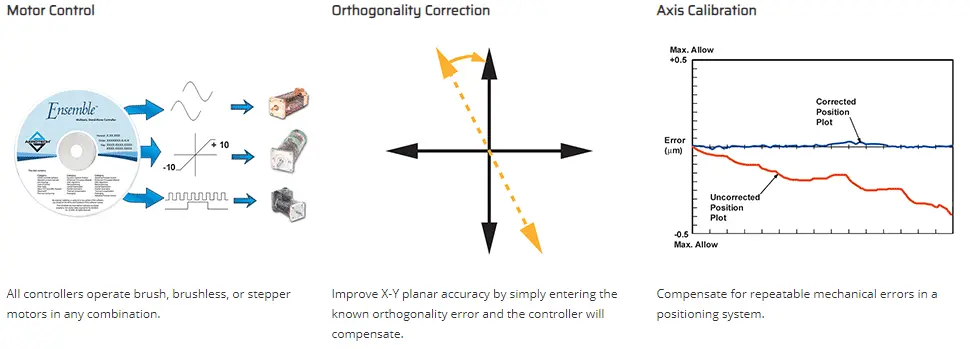
左至右為:多樣化的馬達控制、正交性補償、軸向校準。這些功能可修正機械上存在的系統性誤差。
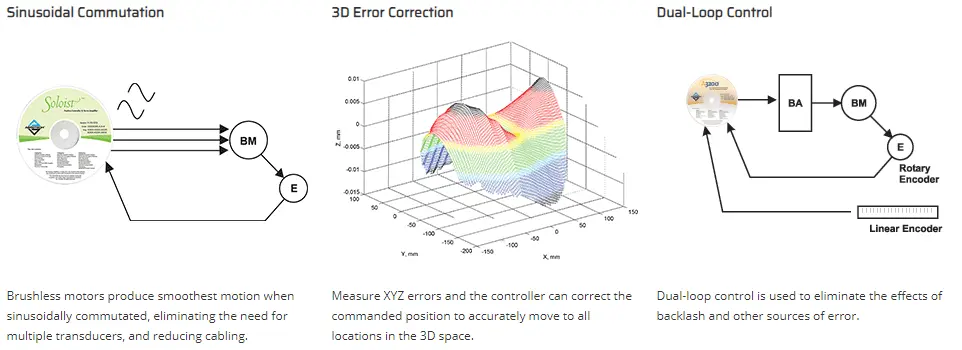
左至右為:正弦波換相、3D誤差補償曲面圖、雙迴路控制。實現極致平順的運動與最高等級的定位精度。
- 正交性補償 (Orthogonality Correction):
對於非理想垂直的X-Y平台,只需輸入測量出的角度誤差,控制器即可自動補償,確保畫出完美的正方形。 - 軸向校準 (Axis Calibration):
透過建立一維或二維的誤差查找表(Look-up Table),補償因導軌不直或機械公差所引起的可重複定位誤差。 - 3D誤差補償 (3D Error Correction):
將誤差校準擴展至整個三維工作空間,確保在任何位置都能達到最高的絕對精度。
- 雙迴路控制 (Dual-Loop Control): 同時使用馬達端的旋轉編碼器和負載端的線性光學尺進行回授控制,能有效消除來自傳動機構(如導螺桿、齒輪)的背隙與彈性變形誤差。
高解析度回授與先進控制演算法
支援業界所有主流的回授裝置,並透過頂尖的控制演算法,發揮其最大效能。

左至右為:標準正交編碼器、用於奈米定位的類比回授、堅固耐用的旋轉變壓器/感應同步尺。
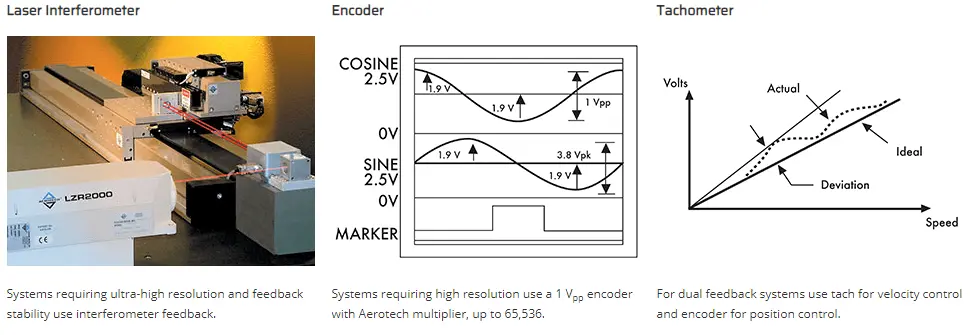
左至右為:奈米級精度的雷射干涉儀、高解析度類比編碼器訊號、用於速度回授的速度感應器。
- PIDFF 控制迴路: 除了傳統的PID回授控制外,增加了速度與加速度前饋(Feedforward),能預測並補償系統的動態行為,大幅減少循跡誤差,提升動態性能。
- 安全區 (Safe Zones): 可在多軸系統中設定虛擬的活動禁區,以保護設備、工件或操作人員,避免發生碰撞。
- 極限與主軸控制 (Limits & Spindle Control): 支援軟體與硬體極限設定,並可透過標準M碼控制主軸轉速與方向。
- 電子凸輪 (CAM Profiling): 可讓一個軸的位置精確地跟隨主軸的位置,形成複雜的電子凸輪曲線,是高度同步自動化應用的關鍵。
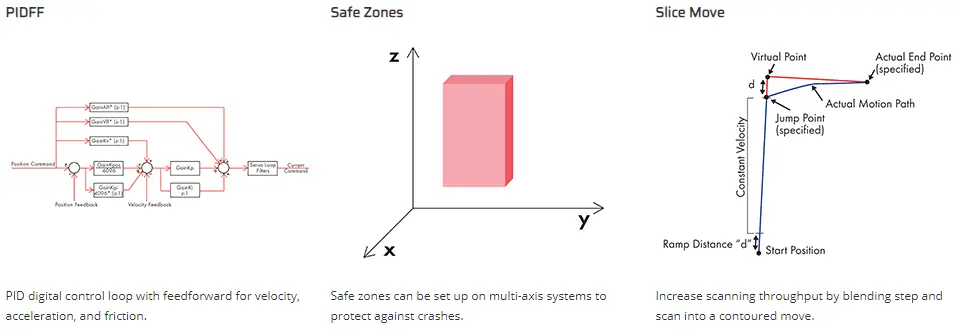
左至右為:PIDFF控制迴路圖、安全區定義、切片掃描運動。實現更佳的動態性能與更高的掃描效率。

左至右為:極限設定、主軸控制、電子凸輪曲線。提供完整的機台整合控制能力。
相關產品
延伸閱讀
- Part-Speed PSO | 在複雜運動學系統上實現以指令速度為基礎的位置同步輸出
- 位置同步輸出 (PSO) | 依據移動距離實現高精度製程觸發控制
- 圓柱工件雷射光柵掃描技術:結合位置同步輸出與飛行標刻之高速加工策略
- 精密滾筒刻寫的運動控制挑戰:實現次微米精度與同步觸發
- 非接觸式位移量測技術於精密運動控制系統之原理與應用
- 告別複雜架構:單一控制器實現雷射掃描與伺服高效整合
- 伺服與振鏡組合運動精度評估:誤差特性分析與系統性能預測
- 掃描頭動態+IFOV同步控制:突破雷射加工速度與品質
- 精準驅動創新:剖析精密運動與自動化技術於高科技產業的革新應用
- IFOV 與 PSO 技術:突破雙光子聚合 (2PP) 積層製造的品質與產能瓶頸
- DrillOptimizer | 消除雷射鑽孔步進穩定延遲,實現零秒瞬定加工