
告別複雜架構:單一控制器實現雷射掃描與伺服高效整合
從 IFOV 到 PSO 精密控制,發掘單一控制器提升產能與加工品質的關鍵
許多雷射加工機製造商對於整合雷射掃描頭(Laser Scan Head)與直接驅動或螺桿驅動伺服平台(Servo Stage)的系統建構具備深厚經驗;在多數情況下,雷射與材料的相互作用往往是驅動元件選擇與製程控制策略的關鍵因素;例如,雷射掃描頭的選用常基於製程處理能力的考量;然而,雷射掃描頭普遍採用的 f-θ (f-theta) 光學元件會影響光束品質,尤其當光束指令位置遠離光學中心時,進而可能降低零件品質與製程性能;此種處理能力(Throughput)與品質(Quality)之間的權衡考量,是將雷射能量精確施加於使用者所期望時間與位置此一更廣泛框架下需考量的面向。
然而,存在有效方法能管理此權衡,進而建構出兼顧製程處理能力與零件品質的雷射加工設備:Aerotech 雷射掃描頭與運動控制解決方案,其核心在於採用單一控制器同時進行掃描頭與伺服運動控制,並提供先進的精密製程控制功能。
高性能雷射掃描頭與整合控制器
AGV-XPO 高動態雷射掃描頭是 Aerotech 性能指標最高的雷射掃描頭產品; 這些二軸雷射掃描頭有助於在速度(Speed)與精度(Precision)之間取得更佳平衡;其低慣量、高效率馬達能達成極高的加速度曲線,同時超高解析度位置回饋與優化的結構動態特性,則提供精準的零件輪廓追蹤,並將追蹤誤差降至最低;如圖 1 所示,相較於 Aerotech 自家的 AGV-HP 二維掃描頭,AGV-XPO 產品在定點抖動(in-position jitter)方面提供顯著達一個數量級的改善,此規格直接提升了動態追蹤能力。
 圖 1. 超高解析度回饋(-E2 選配項目)為需要極精細軌跡精度或使用長有效焦距光學元件的應用提供最低的雜訊水準。
圖 1. 超高解析度回饋(-E2 選配項目)為需要極精細軌跡精度或使用長有效焦距光學元件的應用提供最低的雜訊水準。
這些成果來自於將 AGV-XPO 與 Aerotech 的 Automation1 運動控制平台緊密結合;AGV-XPO 的控制架構相當獨特,其放大器與伺服控制迴路並非內建於雷射掃描頭內部;而是遠端配置於 Automation1 GL4 振鏡雷射掃描頭線性驅動器中;此分離式架構帶來了傳統整合控制器掃描頭無法比擬的系統性能提升;將主要的電子熱源從掃描頭移除,確保了長時間運作下的性能一致性,這對於任何量產型材料加工應用至關重要;GL4 採用線性放大器,此為驅動振鏡馬達(Galvanometric Motors)的最高性能放大器技術,能提供更優異的速度控制與位置穩定性(相較於標準脈衝寬度調變(PWM)放大器技術),請參見圖 2。

 圖 2. 許多雷射掃描頭將散熱的電子元件放置在靠近掃描儀機構的位置,這會引入熱穩定性問題,Aerotech 的 AGV 雷射掃描頭將散熱電子元件移除並放置在控制櫃中 - 實現更高性能並減少熱漂移。
圖 2. 許多雷射掃描頭將散熱的電子元件放置在靠近掃描儀機構的位置,這會引入熱穩定性問題,Aerotech 的 AGV 雷射掃描頭將散熱電子元件移除並放置在控制櫃中 - 實現更高性能並減少熱漂移。
單一控制器架構:實現掃描頭與伺服的精密同步運動控制
Automation1 iSMC 智慧軟體運動控制器作為中央運動控制引擎,能透過 HyperWire 高速運動控制通訊匯流排,向 Automation1 雷射掃描頭與伺服馬達驅動器產生單一同步的運動控制位置串流;HyperWire 匯流排以每秒 2 千兆位元(Gbps)的速率運行,位置更新率高達 100 kHz;此 Automation1 iSMC 控制器能為雷射掃描頭軸產生並傳輸每秒 100,000 點的位置指令,並為伺服軸產生與傳輸每秒 20,000 點的位置指令;透過 HyperWire,Automation1 GL4 驅動器接收 100 kHz 的點資料串流,並內插至 200 kHz,供內部 200 kHz 的二軸雷射掃描頭伺服控制器使用;可搭配多種 Automation1 伺服馬達驅動器,各驅動器均透過 HyperWire 接收 20 kHz 的位置指令串流,並直接用於其伺服控制迴路;所有軌跡點均採用 64 位元雙精度浮點數值定義,即使在單一 HyperWire 埠(Port)上連接多達 16 個軸,驅動器間的同步抖動(Jitter)仍能控制在低於 1 奈秒(ns)的極高水準;簡而言之,在協調精密雷射掃描頭與伺服軸運動方面,目前不存在更優越的運動控制技術。
採用單一控制器進行整合控制,驅動了雷射掃描頭與伺服軸之間最高性能的協調運動,滿足最嚴苛的雷射加工應用需求;Aerotech 的 Automation1 控制器平台獨到之處不僅在於提供掃描頭與伺服軸的單一設定與程式設計環境,更透過後續章節將介紹的獨特控制器功能,實現了更高性能的系統運作。
Automation1 控制器特點:實現精密製程控制與優化
Automation1 為建構精密雷射材料加工機台的使用者,提供了數項關鍵的控制器特點;其中一個主要範例是 Automation1 Studio 應用程式內的機器設定精靈(Machine Setup wizard);如圖 3 所示,此精靈讓使用者能輕易設定實際的電氣與機械裝置,並將這些裝置互相連接,構成真實的運動軸(Axes of Motion)。
 圖 3. 此範例系統,Aerotech IGM 搭配 AGV-HP 雷射掃描頭,已在 Automation1 Studio 的機器設定精靈中完成設定。
圖 3. 此範例系統,Aerotech IGM 搭配 AGV-HP 雷射掃描頭,已在 Automation1 Studio 的機器設定精靈中完成設定。
由於雷射掃描頭軸的慣量(掃描儀反射鏡)是固定的,通常出廠時的優化已足夠;然而,許多機器製造商會在伺服軸上搭載客製化負載,這往往需要進一步的伺服調整與優化;Automation1 為此提供了全面的編碼器回饋調整與伺服調整工具,以最大化這些軸的性能表現。
當軸在伺服控制層級完成優化後,指令位置有時仍無法完全對應到達成目標位置的實際運動;這通常源於雷射掃描頭內部的光學失真(Optical Distortion),以及用於控制雷射掃描頭與伺服運動軸的光學回饋裝置中,因製造公差所產生的誤差;只要這些誤差具有可重複性,有效的解決方案即是進行誤差映射(Error Mapping)。
可以建構基於誤差映射數據的一維(1D)與二維(2D)校準表,並載入 Automation1 控制器中進行補償;Aerotech 提供針對伺服軸誤差映射的特殊服務;同時,機器製造商也能夠自行處理此校準過程;同樣地,雷射掃描頭校準也常由機器製造商執行,而 Aerotech 的 GalvoCFC - 振鏡校準檔案轉換器(圖 4)等工具能簡化此流程。
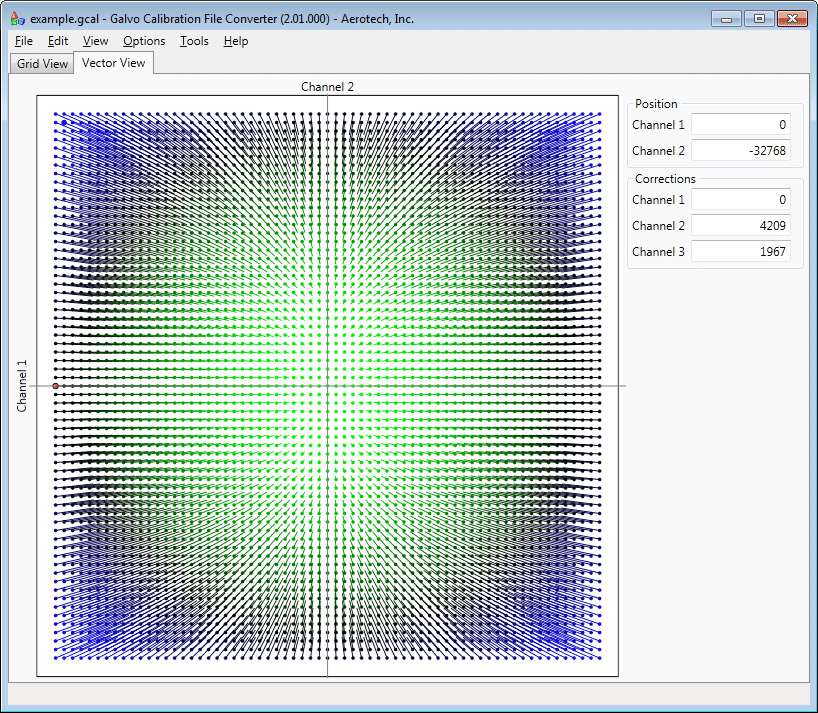 圖 4. Aerotech 振鏡校準檔案轉換器工具讓使用者能夠建立和修改校準檔案、將校準檔案縮放至使用者單位、將校準表內插至更高解析度,以及將多個校準表合併為單一檔案。
圖 4. Aerotech 振鏡校準檔案轉換器工具讓使用者能夠建立和修改校準檔案、將校準檔案縮放至使用者單位、將校準表內插至更高解析度,以及將多個校準表合併為單一檔案。
完成位置精度校準後,還可採取進一步措施來提升處理能力與零件品質;Aerotech 的 Infinite Field of View (IFOV) 功能,讓使用者能以單一 XY 軌跡直接編程加工超出單一雷射掃描頭視野(XY 運動範圍限制)的零件或圖案;IFOV 的運作方式是預先處理整個較大的運動路徑,並將路徑中速度需求較高的部分動態分配給雷射掃描頭執行;同時將速度需求較低的部分分配給伺服軸移動,確保掃描頭始終在其有效的視野範圍內運作;由於 IFOV 消除了傳統步進掃描(Step-and-Scan)的間歇運動,雷射能以更高的時間比例保持開啟,進而顯著提高製程處理能力。
使用 IFOV 的另一獨特優勢在於,實際的伺服平台位置能在進入伺服控制迴路前,即時被 Automation1 GL4 雷射掃描頭控制器得知;這使得雷射掃描頭能夠即時補償伺服平台的動態位置誤差;以這種方式整合掃描頭與伺服平台運動,有助於有效管理可能比掃描頭位置誤差大上數個數量級的伺服平台位置誤差;有關 IFOV 系統設定範例,請參見圖 5。
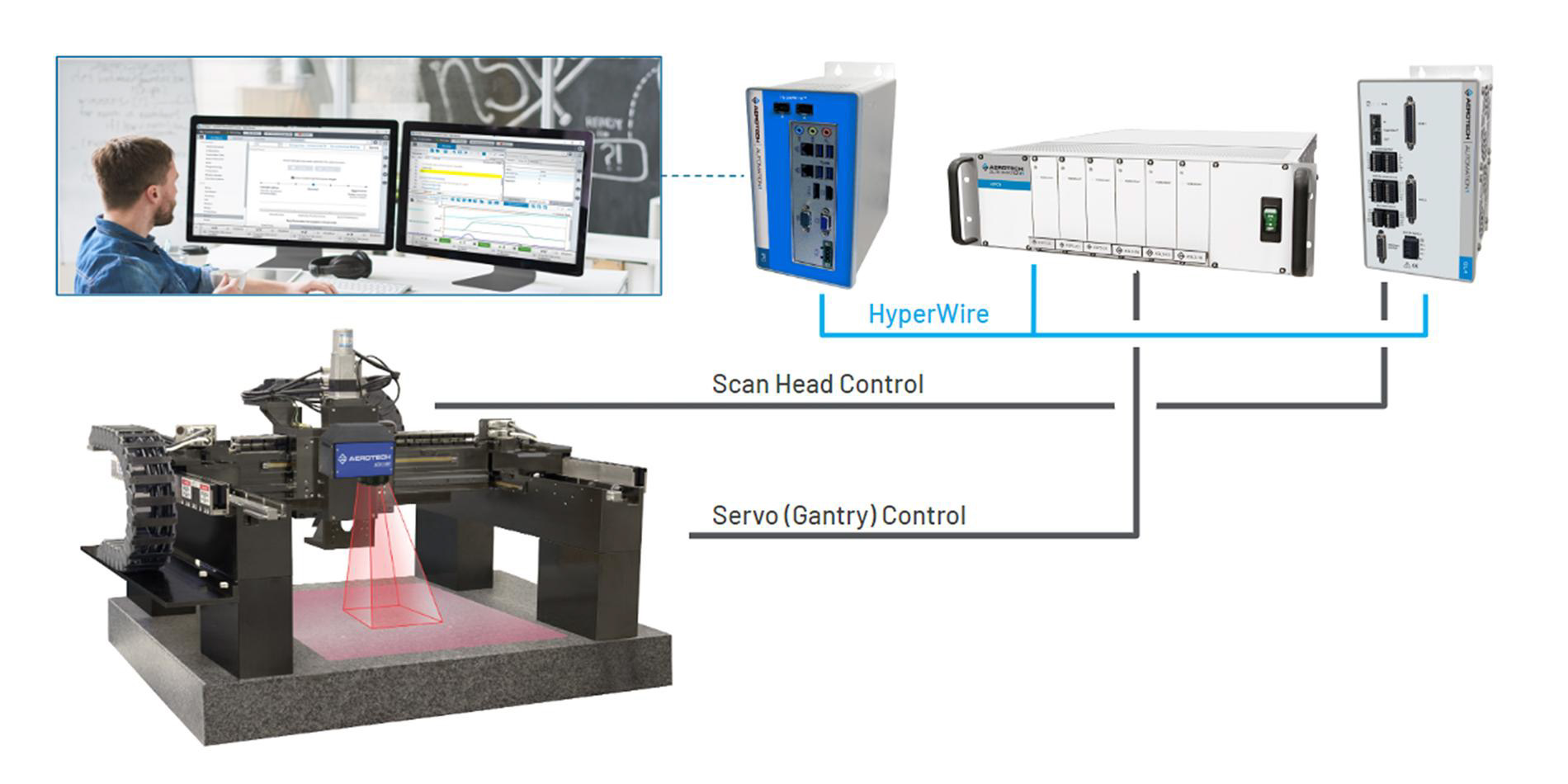 圖 5. Aerotech 的 Infinite Field of View (IFOV) 功能透過考量伺服平台運動來消除步進掃描操作,實現了對大於雷射掃描頭視野的工件進行雷射材料加工。
圖 5. Aerotech 的 Infinite Field of View (IFOV) 功能透過考量伺服平台運動來消除步進掃描操作,實現了對大於雷射掃描頭視野的工件進行雷射材料加工。
IFOV 還帶來了另一項優點 – 提升零件品質;藉由在加工過程中更多地利用平台運動,可以將雷射掃描頭的運動範圍限制在其光學元件的中心區域;光學元件的中心區域是雷射光斑失真最小的部分;由於增加的光斑失真會降低製程品質,因此利用 IFOV 指令運動有助於改善整體的零件品質;若僅限制掃描頭行程仍不足以解決問題,Automation1 還提供振鏡功率校正表(Galvo Power Correction Tables);使用者可根據雷射掃描頭軸的即時位置,動態調整類比輸出電壓;由於雷射光斑失真會改變功率密度,此功率校正功能可用於調節雷射輸出功率,確保一致的雷射-材料相互作用。
當所有機械裝置都設定為由對應的電氣裝置精確控制、所有運動軸都完成校準、且雷射功率在 XY 雷射掃描頭視野內也完成校準後,接下來便是管理運動過程中的雷射-材料相互作用 – 也就是控制軸移動時,雷射能量如何施加於材料上;運動中的雷射製程至少須考量:
- 雷射觸發方式為連續(Continuous)或脈衝(Pulsed);
- 雷射功率是否可調變(Modulated)及其反應速度;
- 雷射-材料相互作用對製程速度的敏感度。
Aerotech 的 Position Synchronized Output (PSO) 工具,為精密雷射加工機製造商提供了管理雷射-材料相互作用的彈性工具組;對於脈衝雷射,可透過追蹤實際行進距離,並依據固定或可變距離觸發事件,來精確管理脈衝間距(Pulse Spacing)(圖 6)。
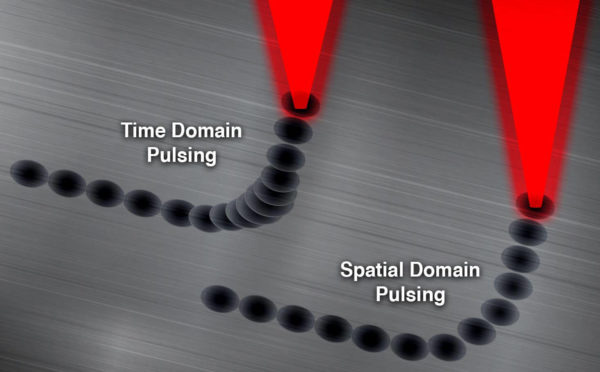 圖 6. 固定距離觸發的一大亮點是速度(加速度)的變化不會影響脈衝間的雷射間距。這種控制方式在高動態精密製程中提高了零件品質和處理能力。
圖 6. 固定距離觸發的一大亮點是速度(加速度)的變化不會影響脈衝間的雷射間距。這種控制方式在高動態精密製程中提高了零件品質和處理能力。
觸發事件通常會在指定的 Automation1 伺服馬達驅動器上,觸發 PSO 輸出接腳的物理狀態改變;此輸出接腳的功能具備高度可配置性:可設定為保持「開啟」特定時間、產生特定波形、或產生一系列脈衝;此外,每次觸發事件也可同時修改一個類比輸出值。
當操作 Automation1 GL4 或 Automation1 GI4 雷射掃描頭控制器時,使用者還能運用一系列雷射輸出控制功能,這些功能可控制三個數位輸出(圖 7)。
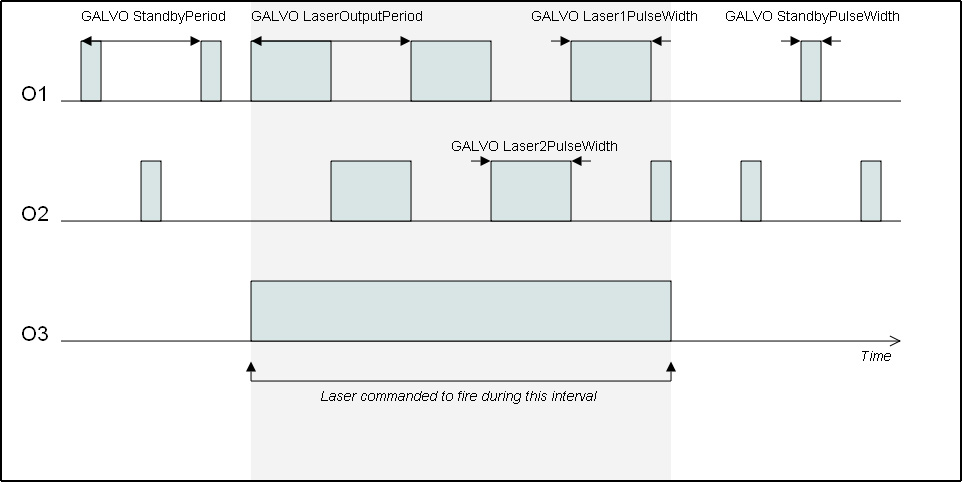
圖 7. 在此標準振鏡雷射模式控制設定中,當雷射觸發時,O1 與 O2 為具有可設定頻率與固定 180° 相位差的調變訊號。當雷射未觸發時,O1 與 O2 輸出可設定為輸出待機脈衝。
這三個輸出支援不同運作模式,各自對應特定類型的工業雷射需求:
- 第一個雷射數位輸出 (O1) 通常控制雷射觸發(Laser Firing);
- 第二個雷射數位輸出 (O2) 可用於抑制首次請求的雷射脈衝,或作為第一個輸出的反相訊號或相移訊號;
- 第三個雷射數位輸出 (O3) 通常用於控制雷射的閘門(Gate),在雷射觸發期間保持開啟狀態;
部分工業雷射需要「預燃(Tickle)」脈衝;為此,當雷射閘門控制關閉時,O1 與 O2 可設定輸出待機週期性脈衝;此待機脈衝功能可透過將待機脈衝長度設定為 0 微秒來關閉。
IFOV、PSO 與雷射輸出控制功能均為 Automation1 運動控制平台中的強大工具,若結合使用,更能發揮加乘效果;設定用於 IFOV 系統的 Automation1 GL4,可同時存取掃描頭與伺服平台的編碼器回饋;GL4 利用此整合資訊來實現 IFOV,並執行一種特殊的二軸 PSO:將一個伺服 X 軸與一個振鏡 X 軸邏輯上結合成單一 X 軸,同理結合 Y 軸;這讓 GL4 控制器能根據沿工件行進的實際雷射光斑距離,即時指令雷射輸出觸發事件;當 PSO 與雷射輸出控制功能皆正確設定時,O1 雷射輸出將由 PSO 控制,而 O2 與 O3 輸出則維持原先的振鏡模式操作;請參見圖 8。
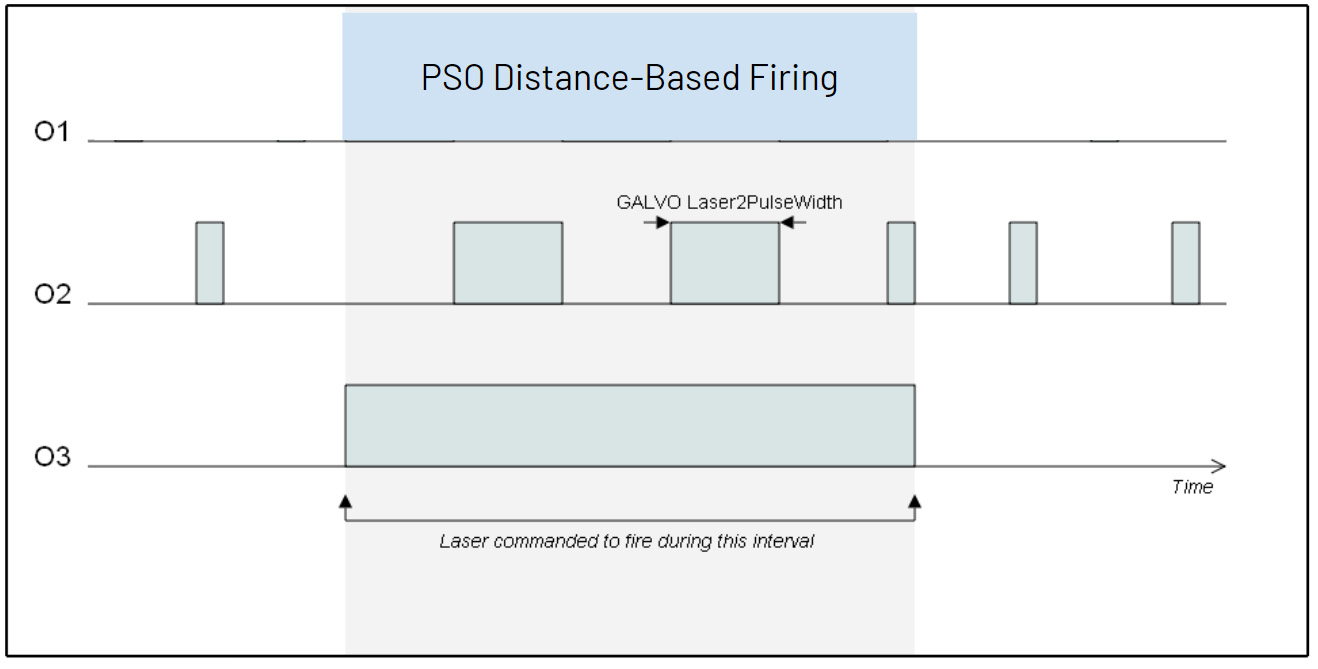 圖 8. 當 Position Synchronized Output (PSO) 與振鏡功能都正確設定時,O1 輸出(參見上圖 7)將被 PSO 設定覆蓋,而 O2 與 O3 仍按照振鏡功能設定運作。
圖 8. 當 Position Synchronized Output (PSO) 與振鏡功能都正確設定時,O1 輸出(參見上圖 7)將被 PSO 設定覆蓋,而 O2 與 O3 仍按照振鏡功能設定運作。
CADFusion:簡化 G-code 路徑生成與製程優化
在工業機台上完成精密雷射製程的設定後,必須開發加工路徑(Part Path)(或輪廓);由於 Automation1 控制器預設處理 G-code,因此可使用任何能輸出 G-code 語法的電腦輔助製造(CAM)軟體來產生加工路徑;Aerotech 為此提供專屬解決方案 CADFusion,特別適用於如玻璃切割或通孔鑽孔等二維輪廓運動應用;此工具 CADFusion 能降低系統整合風險,並確保透過 Automation1 控制器達到最佳性能與精度;透過協助使用者實施 PSO 與 IFOV 等先進雷射加工功能,CADFusion 能顯著改善零件品質;使用者可匯入現有的 DWG 或 DXF 檔案,或直接在 CADFusion 中從零開始設計。
為應對雷射加工的實際需求,CADFusion 內建一系列優化性能的加工路徑規劃功能;如下圖 9 所示,使用者不僅能在 CADFusion 中建立加工路徑,更能:應用如引入(Lead-in)與引出(Lead-out)移動等工具;建立如空中寫字(Skywriting)等過渡移動;設定加工路徑的重複區段;並利用目錄管理器(Catalog Manager)自動套用包含 PSO 在內的製程工具控制語法;最終,只需點擊按鈕,即可將完成的 AeroScript™ 程式檔案匯出至 Automation1 控制器執行。
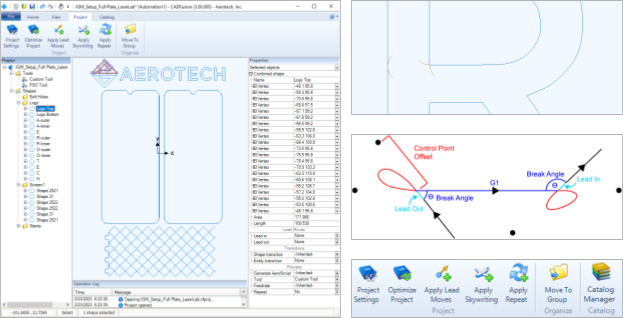 圖 9. 在 CADFusion 中,使用者可以從頭開始開發新專案或匯入現有的 DWG 或 DXF 檔案;使用 CADFusion 的繪圖畫布(左)以及諸如引入和引出移動(右上)、空中寫字(右中)和其他工具列項目(右下)等工具來優化零件路徑。
圖 9. 在 CADFusion 中,使用者可以從頭開始開發新專案或匯入現有的 DWG 或 DXF 檔案;使用 CADFusion 的繪圖畫布(左)以及諸如引入和引出移動(右上)、空中寫字(右中)和其他工具列項目(右下)等工具來優化零件路徑。
整合效益與 Automation1 開發環境
最終成果是一套高性能的精密自動化設備,能充分利用 Automation Motion Development Kit (MDK) 的所有優勢,包括 Studio 應用程式、Automation1 API 及 Automation1 MachineApps Windows 客製化 HMI 工具;Automation1 Studio 應用程式(圖 10)是一個整合性的單一軟體環境,涵蓋了系統的設定、程式設計、調適(Commissioning)與優化等所有階段。
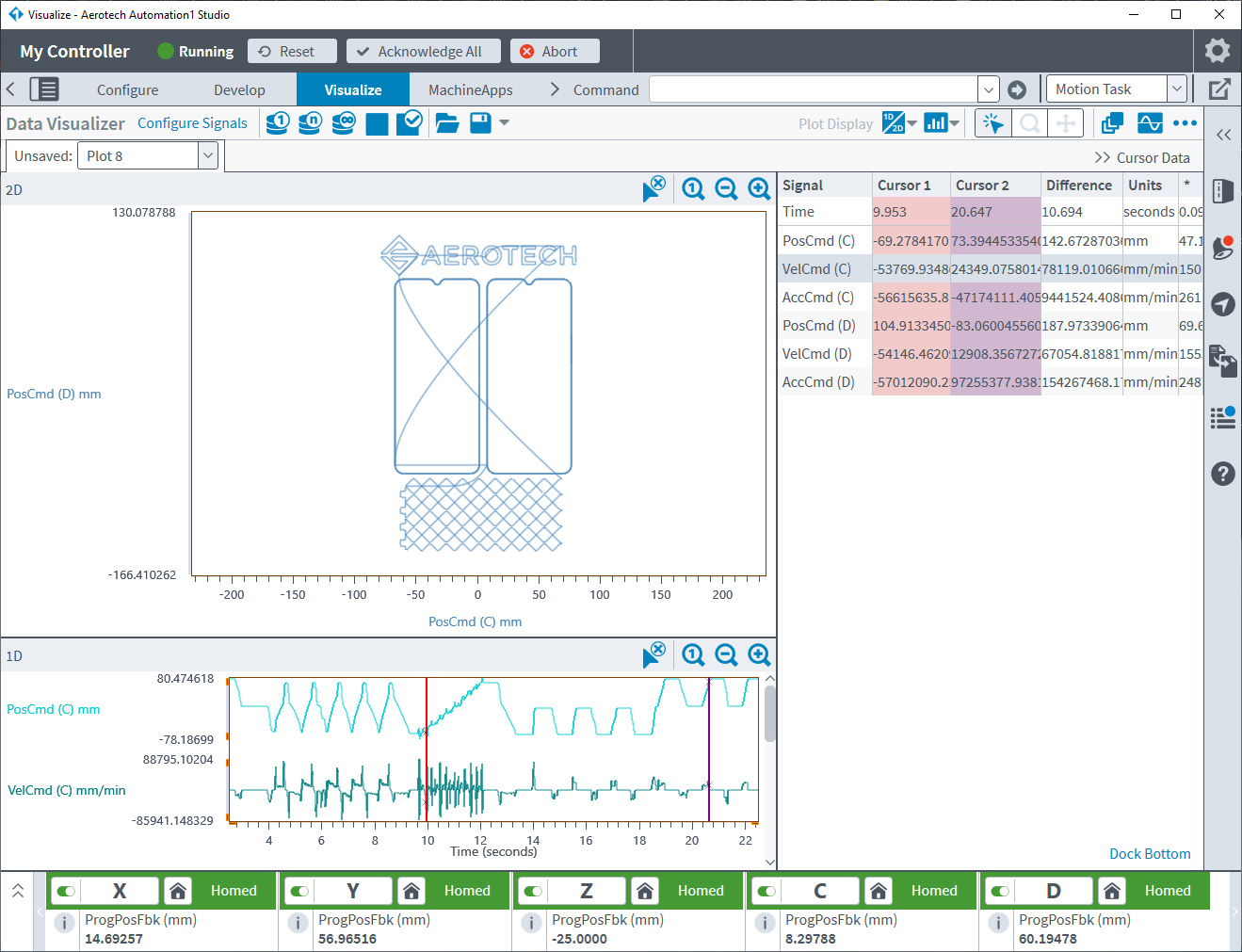 圖 10. Automation1 Studio 應用程式包括機器設定精靈、MachineApps HMI 建構器、現代化的 AeroScript™ 程式設計語言和數位示波器(資料視覺化工具),讓使用者能夠在一個開發環境中設定、程式設計和優化伺服和步進馬達、精密平台、振鏡掃描系統等。
圖 10. Automation1 Studio 應用程式包括機器設定精靈、MachineApps HMI 建構器、現代化的 AeroScript™ 程式設計語言和數位示波器(資料視覺化工具),讓使用者能夠在一個開發環境中設定、程式設計和優化伺服和步進馬達、精密平台、振鏡掃描系統等。
Automation1 Studio 內含強大的程式設計 IDE (),以及一個資料視覺化工具(Data Visualizer),能同時檢視 1D 與 2D 資料;Automation1 API 支援 .NET、C 及 Python 等多種程式語言介面;最後,使用者可利用 MachineApps 工具,快速開發具備客製化風格且高效的人機介面(HMI)畫面;MachineApps 讓設備製造商能將自身品牌形象融入機器操作介面,並採用模組化方法快速佈局使用者介面。
這些強大的工具共同將 Automation1 打造成一個整合的運動控制開發環境,協助那些追求在精密雷射材料加工應用領域保持領先地位的設備製造商。
Aerotech:滿足您獨特的運動控制需求
除了領先業界的標準運動控制元件與系統,Aerotech 更深入了解不同產業的特殊製程需求,並提供兩大系列的解決方案,助您克服獨特的技術挑戰:
特定製程運動控制解決方案
此系列專為高度特定的工業應用所設計,整合了 Aerotech 在精密定位、雷射控制、光學對準等領域的核心技術,提供開箱即用或稍作調整即可符合嚴苛製程要求的優化平台;無論是:
- 高精度的雷射加工 (如 LaserTurn 系列平台)
- 微米級的光纖對準與光子元件測試 (如 FiberMaxHP, FiberAlign, FiberGlide 系列)
- 精密的表面形貌量測 (如 SMP 平台)
- 或是要求氣密性的雷射封裝焊接 (如 HermeSys 系統)
Aerotech 都能提供經過驗證、性能卓越的整合運動控制解決方案,確保您的製程達到最佳的精度、穩定性與產出效率 | 了解更多 >
客製化運動平台解決方案
當標準產品無法滿足您獨一無二的應用規格或整合需求時,Aerotech 的客製化能力將是您的最佳後盾。我們經驗豐富的工程團隊擅長與客戶緊密合作,從概念發想、設計分析到製造組裝,打造完全符合您需求的運動平台。我們的客製化範疇涵蓋:
- 多軸整合與特殊運動軌跡 (如 XY-Theta 系統、六軸/七軸/八軸複合運動系統)
- 空氣軸承、機械軸承或混合軸承的靈活選用與配置 (如各式客製化 IGM 系統、分軸空氣軸承系統、平面空氣軸承系統)
- 特殊環境對應 (如真空、潔淨室) 或特殊負載/尺寸需求 (如高負載平衡旋轉台、大行程龍門系統、重載平面空氣軸承系統)
- 針對特定儀器或製程設備的精密整合 (如多軸薄層成像系統)
從桌上型 XYZ 運動系統到大型模組化龍門系統,Aerotech 的客製化運動平台不僅滿足您的規格要求,更在精度、動態性能與長期可靠性上達到業界頂尖水準 | 了解更多 >
無論您的應用需求多麼特殊,在台灣,奧創系統都能提供 Aerotech 相應的精密運動控制解決方案,歡迎與我們的技術專家聯繫,探討如何將您的創新理念化為實際。
作者簡介

作為資深產品經理,Patrick Wheeler 負責監督 Aerotech 完整的控制器產品線,包括軟體、控制器和驅動電子裝置;他擁有 Lehigh University 電機工程學士學位和 University of Southern California 電機工程碩士學位;他超過 16 年的工業經驗涵蓋營運、專案管理、銷售和行銷;在他的職業生涯中,他一直負責控制器和工業自動化的規格制定與介接。

Aerotech 產品經理 Bryan Germann 專注於光操控產品,包括 Aerotech 的 AGV 雷射掃描頭及相關的 Automation1 驅動器和軟體控制特點;他在設計和管理高精度運動控制與自動化機械及產品的生產方面擁有實務經驗;Germann 擁有 University of South Carolina 機械工程學士和碩士學位;他持有 17 項美國及國際專利。