
評估伺服與振鏡的組合運動精度
在現代運動控制系統中,首要的關鍵效能指標,通常是在工件表面上可實現的整體精度,然而,當為更進階的功能(例如:IFOV 無限視野)配置運動控制架構時,要對系統性誤差的每個元素進行特性分析,往往極具挑戰性,因為這類複雜的系統,不僅存在主要的誤差來源,更會因平台與振鏡的整合運作,而衍生出次要誤差,本篇技術白皮書將詳細說明如何特性分析這些組成誤差元素,並提出一套能有效預測支援 IFOV 功能之運動控制平台整體系統誤差的方法。
在評估誤差時,可以將其歸納為三大類:
- 來自底層伺服平台的誤差
- 來自振鏡的誤差(包含由入射雷射光束偏心所引起的誤差)
- 因結合使用平台與振鏡系統而產生的系統性誤差
在收集下方所示的實驗資料之前,已使用 2D 校正(亦即平面鏡與雙雷射干涉儀)對底層的線性馬達伺服平台進行校準,透過此校準流程,可優化其靜態誤差表現,其方法不僅是移除平台編碼器本身的「直線度」誤差,更同時修正了由平台偏擺運動,以及各軸之間非正交校準所造成的誤差,此次校準的工作點,選擇設置在振鏡視野範圍的中心正下方,最終,單獨由平台產生的誤差小於 10 微米,其向量和為 5.26 微米(參見下圖 1),而 X、Y 方向的具體誤差,則明確記錄在後續呈現的資料集中。
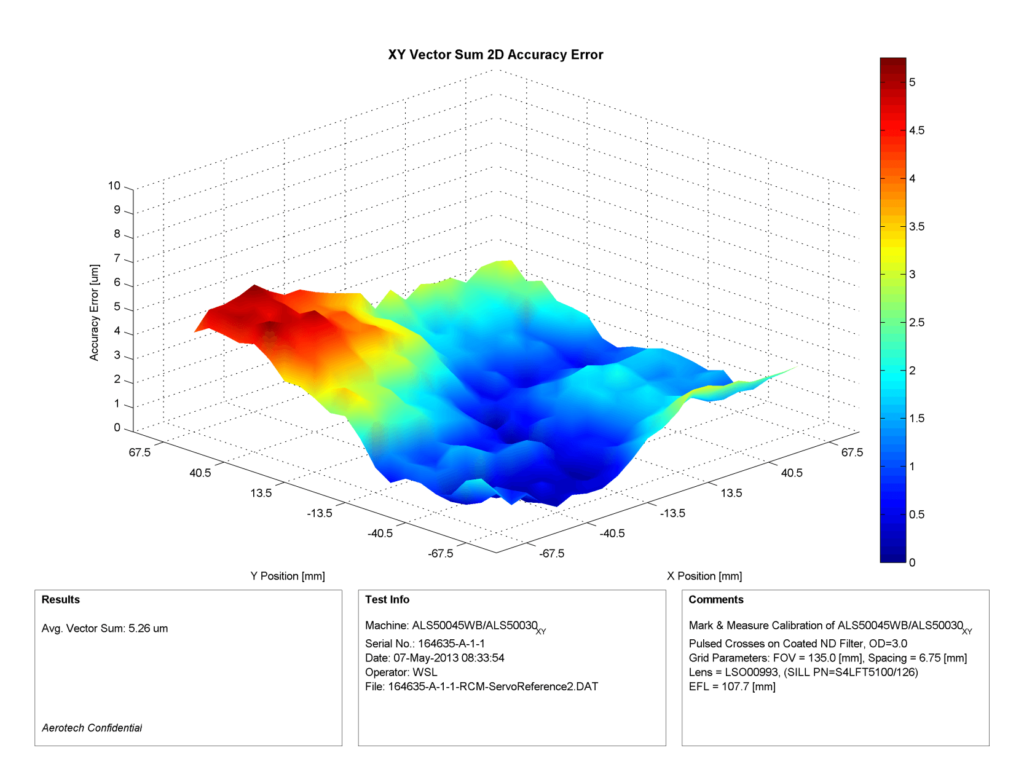
圖 1. 伺服平台向量誤差
振鏡本身則是採用「標記與量測」技術進行校準,此技術使用紅外光雷射(1070nm 波長)在鍍銀玻璃基板上進行標記,隨後在高倍率下精密量測這些標記的位置,並將標記的實際位置與其預期位置之間的誤差,透過迭代運算方式,產生一系列校正表,最終校準後的誤差結果如下所示(向量誤差為 2.06 微米)。
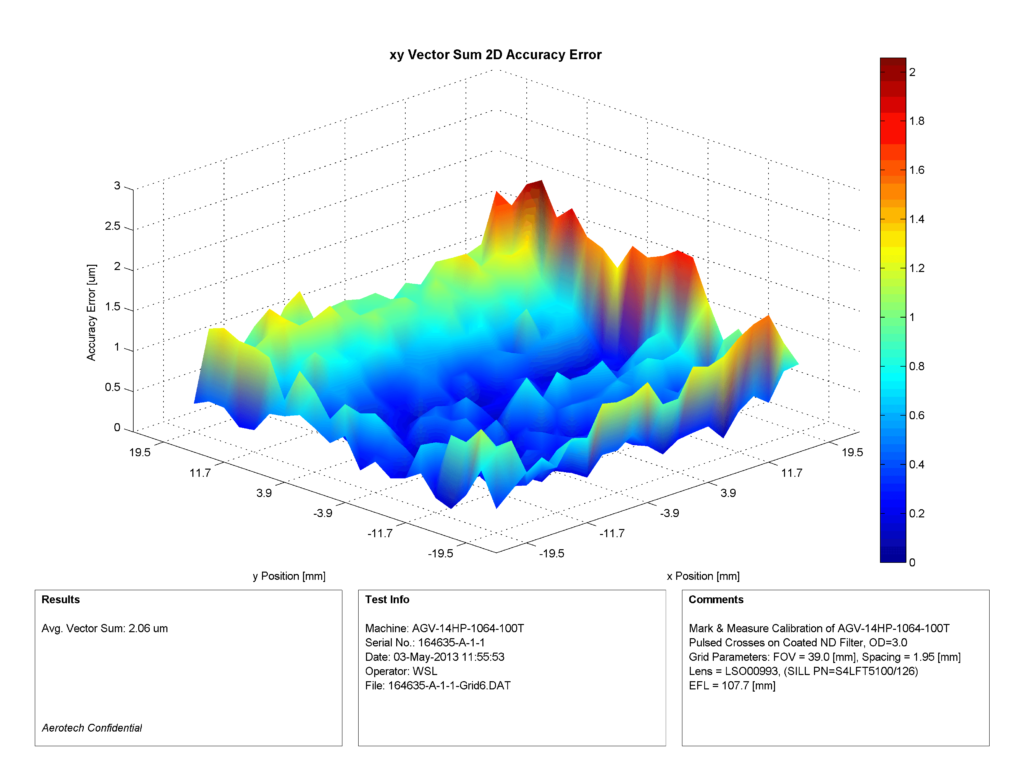
圖 2. 振鏡向量誤差
所有誤差來源中,最值得深入分析的,是由這兩種運動子系統組合所產生的誤差,這類誤差的來源有多種,包括:
- 平台移動方向與振鏡軸向之間的旋轉未對準
- 平台 XY 移動平面與振鏡焦平面之間的共平面度誤差
- 因平台的 2D 校正僅在單一工作點完成,而未能修正的次要誤差(特別是平台偏擺),但在實際雷射標記過程中,加工點卻可能落在振鏡視野範圍內的任何位置。
確定這些系統性誤差的實際流程,採用了「隨機組合運動網格標記」法,具體描繪如下。
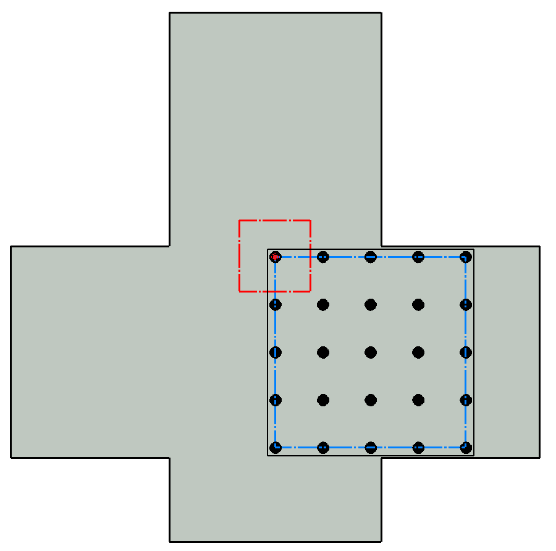
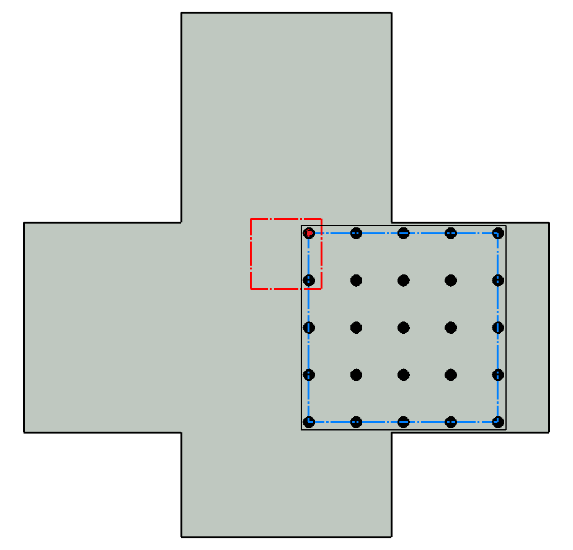
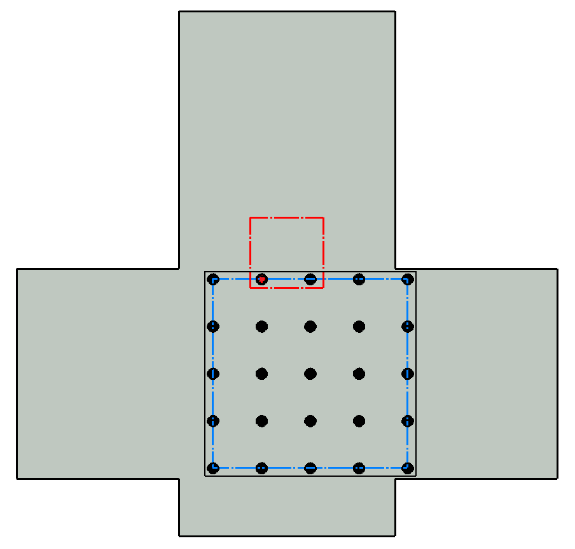
接下來的一系列圖示,重點在展示如何透過結合伺服軸座標系與振鏡掃描儀座標系的運動,來創建「隨機組合運動網格」,這些圖示呈現了伺服軸的移動、振鏡軸的視野範圍,以及由隨機組合運動測試程式實際標記的網格之相對位置,灰色外框代表平台組件,黑色方塊代表(由上方平台軸承載的)標記基板,黑點則代表待標記的網格,網格的整體尺寸,即藍色虛線方塊,等於伺服平台的總行程減去振鏡的總視野範圍(在我們的測試案例中為 96.0 x 96.0 [mm]),紅色虛線方塊代表掃描儀的總視野範圍,此處為 39.0 x 39.0 [mm],而位於 AGV 視野內的紅點則代表雷射光斑的位置。
執行程序
- 首先,伺服軸與振鏡軸會復歸至其原點位置,並確保標記基板的中心點,對準在 AGV 掃描振鏡(Aerotech Galvanometer Scanner,此處縮寫為 AGV)的視野正下方。
- 在振鏡軸維持其原點位置的情況下,伺服軸將基板上的第一個標記位置,精確移動至雷射光斑的正下方。
- 接著,伺服軸朝一隨機方向,移動一段相當於振鏡視野範圍隨機百分比的距離。
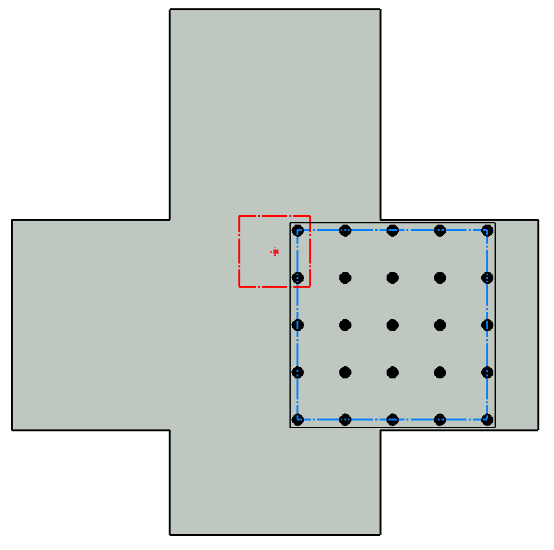
- 隨後,振鏡軸會執行一次方向相反的補償移動,在理想情況下,如果兩個座標系完美對準且全等,這兩組運動子系統的位移將會相互抵銷,最終將雷射光斑精確地導引至網格中的目標位置,以完成標記作業。
- 標記創建完成後,伺服與振鏡軸會復原該次隨機運動,將標記位置帶回到振鏡視野的中心下方。
- 伺服軸移動至第二個標記位置,將其置於雷射光斑下方,此時振鏡軸同樣維持在原點位置。
- 伺服軸重複步驟 3 的動作,再次朝隨機方向移動一段隨機距離。
- 振鏡軸再次進行反向補償移動,抵銷伺服軸的運動,並將雷射光斑準確地放置在 2 號標記位置。
- 此過程將重複進行,直到整個網格標記完成,接著,使用相同的檢測站對最終產出的網格進行精密量測。
最終測得的組合運動誤差,如下圖 3 所示。
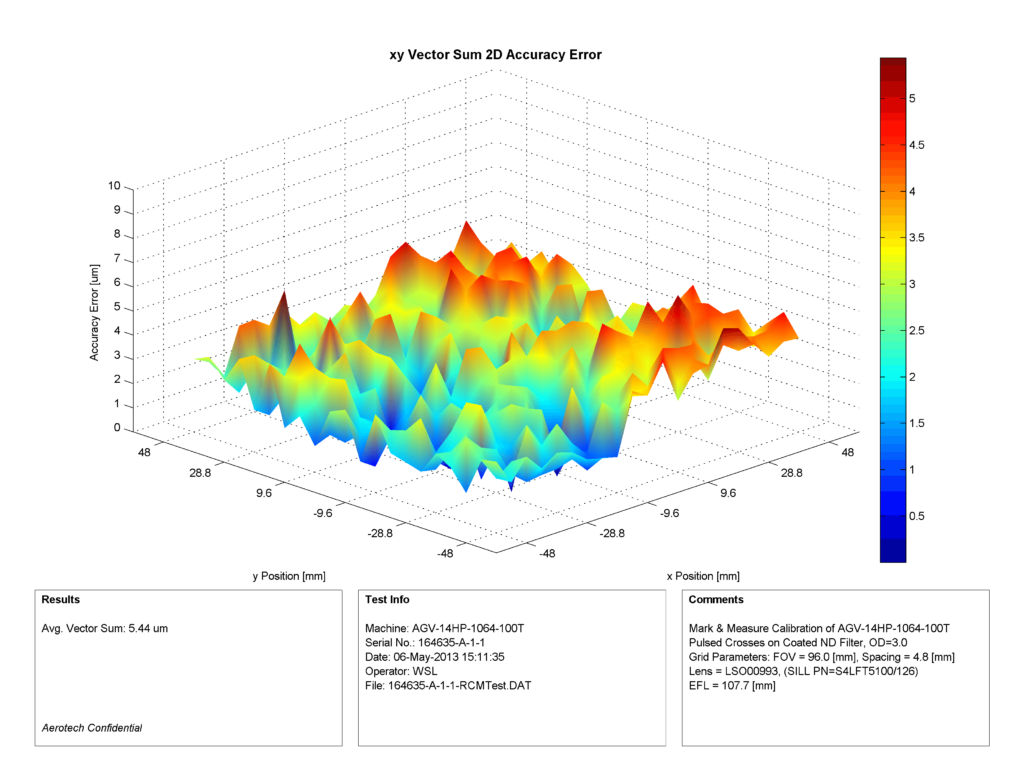
圖 3. 組合運動向量誤差
此外,可將這些誤差進行統計性組合,整理如下表。
測試總結表:組合伺服與振鏡運動精度
|
網格 |
X 軸精度, 4σ [µm pk-pk] |
X 軸精度, 原始值 [µm pk-pk] |
Y 軸精度, 4σ [µm pk-pk] |
Y 軸精度, 原始值 [µm pk-pk] |
向量誤差, 原始值 [µm peak] |
正交性 [角秒] |
|
獨立 AGV 網格 |
1.61 |
2.45 |
1.77 |
2.75 |
2.06 |
1.86 |
|
獨立伺服網格 |
4.60 |
6.00 |
6.55 |
7.71 |
5.26 |
9.10 |
|
隨機組合運動網格 #1 |
4.97 |
8.10 |
4.69 |
6.72 |
5.44 |
10.68 |
|
隨機組合運動網格 #2 |
6.00 |
7.95 |
4.83 |
7.13 |
5.29 |
7.67 |
|
註:4σ 誤差值代表 95.45% 信賴區間的峰對峰值誤差 |
||||||
結論
在檢視此測試中三個網格的量測結果時,可以明顯看出,隨機組合運動網格的整體精度與誤差模式,主要由伺服軸的性能所主導,這結果並不令人意外,因為在組合運動的過程中,伺服軸不僅承擔了絕大部分的位移,同時也是系統中最大的誤差貢獻者,此次測試的結果,讓我們在採用組合運動系統時,能對雷射標記的性能做出相當可靠的預估,並有助於依據特定應用的目標,來決定選擇哪種平台更為合適,其中最關鍵的發現是,不論從各網格的 4σ 誤差分佈或是向量誤差來分析,結果都明確指向一個結論:振鏡與伺服軸各自誤差的方均根(Root Sum Square, RSS)值,可用來有效估算這兩個獨立座標系組合運作時的總誤差,因此,系統設計師僅需了解基礎(伺服與振鏡)誤差,便能對組合系統的整體性能做出準確的預估。
關於作者

Scott Schmidt 是 Aerotech Inc. 的應用工程經理,在先進雷射加工與微加工領域擁有 17 年的豐富經驗,持有賓州州立大學的電機工程學士學位,以及麻薩諸塞大學的電機與電腦工程碩士學位。

William S. Land II 是 Aerotech Inc. 的機械工程師暨行銷營運經理,負責管理其全球行銷業務的技術層面,在 Aerotech 服務已超過十年,曾擔任過多個工程、產品管理及業務開發相關職務,持有賓州州立大學的機械工程學士學位,以及北卡羅來納大學夏洛特分校的機械工程碩士學位。
相關產品
運動模擬器
光電紅外線測試
延伸閱讀
- 高精度五軸雷射進動掃描技術(PSO) 如何提升微加工能力
- 探索Part-Speed PSO 如何加速光束線非笛卡爾系統量測
- 圓柱工件雷射光柵掃描技術:結合位置同步輸出與飛行標刻之高速加工策略
- 非接觸式位移量測原理:渦電流、電容、雷射三角、共軛焦技術
- 精密滾筒刻寫的運動控制挑戰:實現次微米精度與同步觸發
- 揭密不可見光:紅外線技術原理、成像應用與精密測試
- 非光學合路多光譜光源:紅外線、可見光與雷射整合測試技術解析
- 先進輻射校準技術白皮書:增強型黑體於研發、半導體及工業領域先進紅外線測試與校準解決方案