
自動駕駛之眼的全方位試煉:GNSS+IMU+視覺/光學雷達多感測器融合測試的挑戰與策略
超越單一感知 – 多感測器融合在自動駕駛定位中的核心地位
自動駕駛(Autonomous Driving, AD)技術的發展,正以前所未有的態勢重塑著人類的出行方式,從L2級的輔助駕駛到追求L5級的完全自主,每一個進階都對車輛的環境感知、決策規劃以及自身定位定向(PNT)能力提出了近乎苛刻的要求,在複雜多變的真實駕駛環境中,單一類型的感測器(無論是GNSS、IMU、視覺攝影機還是光學雷達LiDAR)都難以憑一己之力提供持續、精準且在所有條件下都絕對可靠的PNT資訊。因此,多感測器融合已成為實現高強韌性、高精度自動駕駛定位系統的核心技術路徑。
多感測器融合的目標在於整合不同感測器的優勢,彌補各自的缺陷,從而輸出一個比任何單一感測器都更為準確、可靠和連續的PNT解。例如,GNSS提供長期的絕對位置參考,IMU提供短期的高頻姿態與運動更新,視覺攝影機提供豐富的環境語義和紋理資訊,而光學雷達則能提供精密的三維點雲數據;然而,將這些異構感測器的數據有效融合,並在各種工況和挑戰性環境下確保融合系統的性能,對研發工程師而言,意味著必須克服一系列的技術難題,其中,全面而嚴謹的測試驗證是確保系統安全可靠的基石。
多感測器融合定位系統的典型架構與挑戰
融合層級與架構
根據數據融合發生的層次,多感測器融合架構大致可分為鬆耦合、緊耦合和深耦合(或因子圖優化等更先進的整體優化框架)。
核心技術挑戰
- 時間同步(Time Synchronization):
在微秒級甚至更高精度上對齊GNSS、IMU、攝影機、LiDAR等異構數據流。 - 空間標定(Spatial Calibration / Extrinsic Calibration):
精確測量並補償各感測器間的相對位置與姿態。 - 數據關聯與一致性(Data Association and Consistency):
正確匹配不同感測器的觀測數據至同一物理目標或特徵。 - 感測器故障偵測、診斷與排除(Sensor FDDE):
融合系統需能快速、準確地應對單一或多個感測器的故障或性能下降。 - 模型傳真度與環境適應性(Model Fidelity and Environmental Adaptability):
感測器誤差模型、車輛運動模型、環境感知演算法的準確性與適應性。
多感測器融合系統的測試驗證策略與方法學
一個典型的測試驗證流程通常遵循從純軟體到整合硬體再到真實車輛的漸進式路徑:SIL -> HIL -> VIL -> 實路測試。
硬體在環(HIL)模擬測試平台的關鍵作用
HIL測試為多感測器融合系統提供了一個安全、可控、可重複的驗證環境,一個典型的PNT相關HIL平台,如下圖所示的架構,可以整合GNSS訊號模擬、慣性運動模擬,並為其他感測器(如視覺、光學雷達)提供同步的虛擬場景或數據流,奧創系統科技提供的硬體迴路(HIL)模擬測試方案,正是致力於根據客戶複雜的感測器融合測試需求,客製化整合各類高傳真模擬器與待測硬體(如自動駕駛域控制器),並確保關鍵的數據同步與場景一致性。
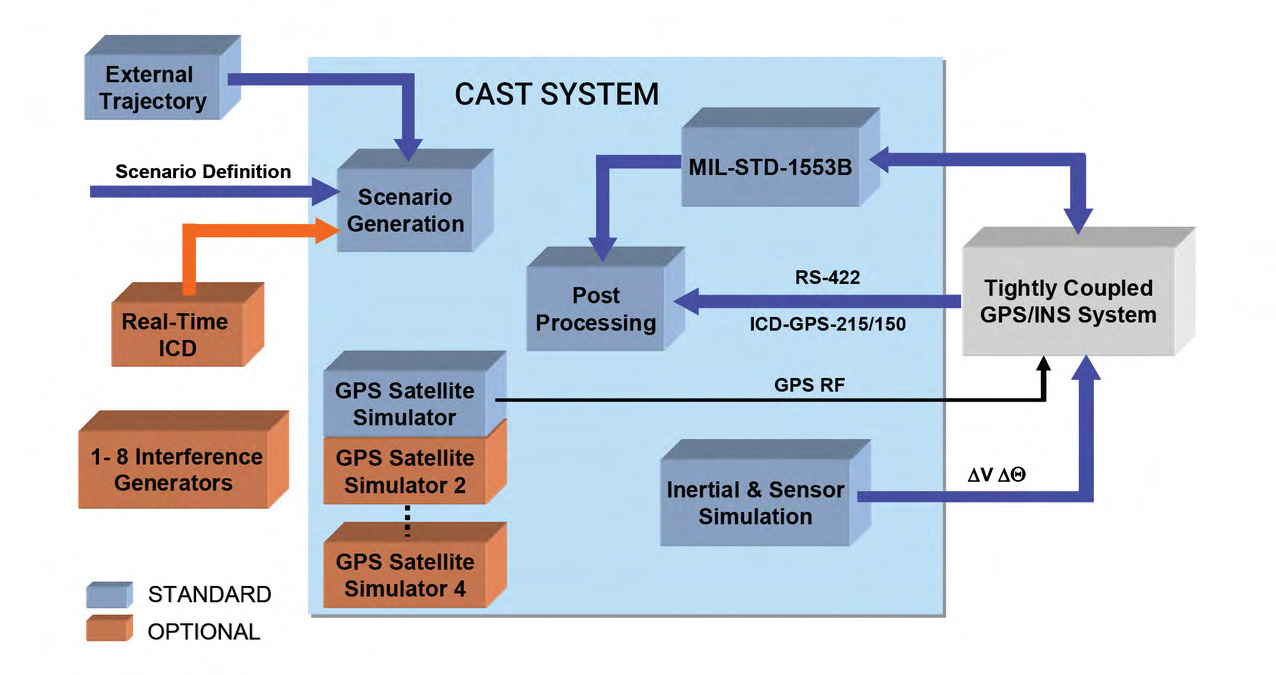 典型的GNSS+INS(或其他感測器)融合系統HIL測試平台架構示意圖,該平台整合了外部軌跡輸入、場景產生、即時介面控制(Real-Time ICD)、干擾產生器(Interference Generators)、GNSS衛星訊號模擬器(GPS Satellite Simulator)、慣性及其他感測器模擬(Inertial & Sensor Simulation),以及後處理單元,共同為待測的緊耦合PNT系統提供全面的、同步的測試輸入。
典型的GNSS+INS(或其他感測器)融合系統HIL測試平台架構示意圖,該平台整合了外部軌跡輸入、場景產生、即時介面控制(Real-Time ICD)、干擾產生器(Interference Generators)、GNSS衛星訊號模擬器(GPS Satellite Simulator)、慣性及其他感測器模擬(Inertial & Sensor Simulation),以及後處理單元,共同為待測的緊耦合PNT系統提供全面的、同步的測試輸入。GNSS訊號模擬在融合測試中的核心地位
在多感測器融合系統中,GNSS通常提供全局絕對位置參考,因此,GNSS訊號模擬的真實性和靈活性對融合測試至關重要;OHB XPLORA Pro等高階GNSS模擬器,以其即時、多星座(支援GPS, GLONASS, Galileo, BeiDou等)、多頻段(如L1, L2, L5, E1, E5a/b等)的訊號產生能力,以及與外部系統(如IMU運動模擬器、視覺場景產生器)的精密同步介面(1PPS, 10MHz, Ethernet Triggers),能夠為融合演算法提供準確可靠的GNSS輸入;其可選配的干擾/欺騙訊號產生及多路徑模擬功能(可模擬數十條獨立多徑),以及高達50Hz的動態軌跡更新率,對於測試融合系統在GNSS訊號品質下降或受攻擊時的強韌性尤為重要。
此外,對於需要在不同實驗室或近場地快速部署驗證,或特別關注雙頻GNSS接收機在消除電離層誤差方面對融合定位貢獻的測試,如 CAST-1000 可攜式雙頻GNSS模擬器 這樣的便攜式解決方案,則以其緊湊設計與專業的雙頻訊號模擬能力,提供了另一種高效的測試選擇。
而為了更深入、更專門地評估融合系統在複雜電磁對抗環境下的PNT強韌性,除了通用GNSS模擬器內建的干擾功能外,研發團隊還可能採用GNSS導航干擾模擬系統。這類系統能夠產生更多樣化、可精確編程的特定干擾波形與攻擊腳本,用以嚴苛驗證融合演算法中的GNSS數據品質評估、故障偵測與排除(FDE)邏輯,以及在GNSS資訊高度不可信時系統向其他感測器(如IMU、視覺)切換的策略與性能保持能力。

OHB XPLORA Pro GNSS模擬器,以其強大的即時訊號產生能力、多通道RF輸出以及與外部系統的精密同步特性,是進行複雜多感測器融合HIL測試中GNSS訊號源的理想選擇。
IMU與運動模擬的整合
對於以GNSS+IMU為核心的融合系統,GNSS-INS即時模擬平台能夠提供同步的GNSS RF訊號和IMU動態數據流,若需測試真實IMU的物理響應,則可將其安裝於六軸運動平台 (Hexapods)上,由平台根據虛擬場景的車輛運動軌跡進行驅動,Hexapod的焦點規格在於其高精度(微米級重複定位)、高頻寬(可響應快速運動變化)的六自由度運動模擬能力,以及多種負載等級(如250kg以下和250kg以上)的選擇。
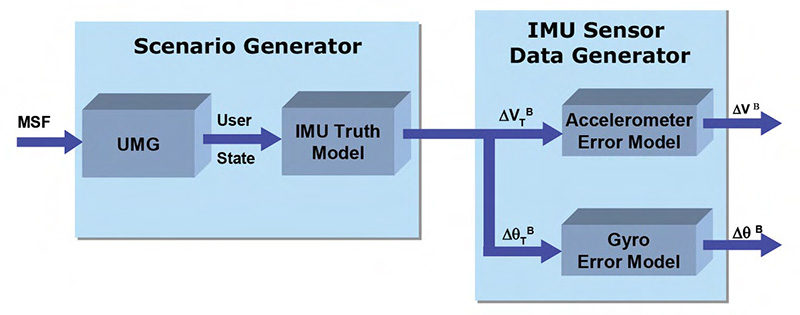
在HIL測試中,精密的IMU模擬至關重要,如CAST-3000內部IMU模擬功能示意圖所示,場景產生器(Scenario Generator)輸出的理想運動狀態(User State)經過IMU真值模型(IMU Truth Model)後,會疊加加速度計和陀螺儀的誤差模型(Error Models),以產生逼真的IMU感測器數據(DeltaV_TB,Deltatheta_TB)。
視覺/光學雷達場景模擬與同步
對於包含視覺或光學雷達的融合系統,測試平台還需整合3D虛擬場景產生軟體,關鍵在於確保這些虛擬感測器的數據流與GNSS/IMU的模擬在時間和空間上嚴格同步,對於需要極致沉浸感和駕駛員在環(DIL)的測試,VHT 高階駕駛研究模擬器提供了頂級的解決方案,其整合了大型運動系統和高傳真視覺系統,能夠搭載真實的駕駛艙甚至整車。

領先汽車製造商如雷諾(Renault)採用基於VHT高階駕駛研究模擬器的ROADS系統,其高達6000kg的承載能力和擴展的XY運動範圍,允許將真實車輛駕駛艙置於運動平台上,進行高度沉浸和動態的多感測器融合與自動駕駛功能測試。
多感測器融合測試的具體工程考量與挑戰
- 精確的時間戳對齊與延遲補償。
- 跨感測器的座標系標定誤差對融合結果的影響。
- 模擬環境與真實世界的一致性「Reality Gap」:
為進一步縮小模擬與真實世界之間的差異,並利用不可預測的真實世界數據來驗證融合演算法的普適性與極限性能,GNSS訊號記錄與回放系統扮演了關鍵角色,例如,RP-6500 多頻多星系GNSS訊號記錄與回放系統,其具備的高保真、寬頻寬訊號記錄能力(支援多個GNSS頻段)以及精確的RF訊號回放功能,允許工程師團隊在外場採集極具挑戰性的真實GNSS數據,然後將這些「黃金數據」帶回實驗室,在可控環境下對多感測器融合系統進行重複的、有針對性的壓力測試與性能調優。 - 大量測試數據的管理與自動化分析:
利用如XPLORA One的軟體介面(如XPLORA Core),工程師可以便捷地規劃測試軌跡、設定衛星與環境參數,並記錄詳細的模擬數據,有助於後續的演算法調試與性能評估。
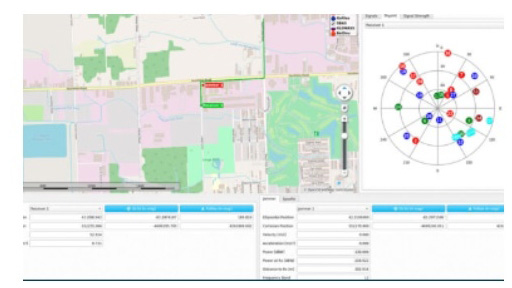 GNSS模擬器的使用者介面(如OHB XPLORA One的XPLORA Core軟體所示)允許工程師靈活定義模擬場景,包括車輛軌跡(地圖面板)、衛星可見性與健康狀態(星空圖面板)、以及詳細的接收機PNT輸出(數據列表面板),為多感測器融合測試提供可控的GNSS輸入。
GNSS模擬器的使用者介面(如OHB XPLORA One的XPLORA Core軟體所示)允許工程師靈活定義模擬場景,包括車輛軌跡(地圖面板)、衛星可見性與健康狀態(星空圖面板)、以及詳細的接收機PNT輸出(數據列表面板),為多感測器融合測試提供可控的GNSS輸入。
- 閉環控制的即時性要求。
- RF訊號分配的挑戰:
在構建複雜的HIL測試平台,特別是當涉及到多個待測單元(DUTs)並行測試,或需要將同一路高傳真GNSS模擬訊號精確分配給不同子系統時,專業的RF訊號分配與調節組件就顯得尤為重要,而像FDMx2系列射頻多工器/分配器則提供了高隔離度、低插入損耗的多路訊號輸出能力,這些都有助於確保在大型或分佈式HIL測試台中,每個GNSS接收前端都能獲得穩定、一致且高品質的模擬訊號輸入。
多感測器融合測試的關鍵環節與技術方案
|
測試環節 |
核心挑戰 |
技術解決思路 |
|
GNSS訊號模擬 |
高傳真再現多星座、多頻段、動態軌跡、複雜環境(多路徑、干擾) |
XPLORA Pro (即時、高通道、多RF輸出、威脅模擬); XPLORA One (高性價比、基礎場景); CAST-1000 (便攜雙頻); SatGen (場景產生); ACE9600 (通道模擬); GNSS導航干擾模擬系統 (專用干擾) |
|
IMU運動與誤差模擬 |
精確模擬六自由度運動及IMU各項誤差特性 |
GNSS-INS即時模擬平台;六軸運動平台 (Hexapods) (物理運動);高傳真IMU數學模型 |
|
視覺/光學雷達場景模擬 |
產生與GNSS/IMU同步的高傳真3D虛擬環境與感測器原始數據 |
專業3D場景模擬軟體;VHT 高階駕駛研究模擬器 (整合運動與視覺) |
|
多感測器時間同步 |
確保各感測器數據流具有微秒級或更高的時間戳對齊精度 |
HIL平台主控的精密時鐘分發與觸發機制;模擬器支援1PPS/10MHz等精密同步訊號(如XPLORA Pro) |
|
系統整合與數據分析 |
大量異構數據的採集、記錄、對齊與自動化分析;閉環控制的即時性 |
硬體迴路(HIL)模擬測試方案 (客製化整合與軟體);RP-6500 (數據記錄回放);專業數據後處理工具 |
|
RF訊號分配與調節 |
在多DUT或複雜測試台中確保GNSS模擬訊號品質一致性 |
FDMx2系列 (多路分配) |
未來趨勢:AI驅動的測試、數位雙生與標準化
多感測器融合測試技術將朝著更智慧、更高效、更標準化的方向發展:
- AI在測試中的應用:
利用AI自動產生複雜且具有代表性的測試案例、智慧注入故障模式、以及對海量測試數據進行模式識別與異常檢測。 - 數位雙生(Digital Twin)的深化:
建立待測PNT系統及其運行環境的高傳真數位雙生模型,實現從設計、模擬、測試、部署到運維的全生命週期閉環驗證與優化。 - 測試場景、數據格式與評估指標的標準化:
促進行業內的技術交流、數據共享以及測試結果的可比性。
全面而嚴謹的測試 – 鑄就自動駕駛PNT系統的可靠基石
為自動駕駛打造一雙全天候、全地域、全場景下都「明察秋毫」的「精準之眼」,離不開對GNSS、IMU、視覺、光學雷達等多感測器融合定位系統的極致打磨,而全面、嚴謹、高效的測試驗證,正是通往這一目標的必由之路;從SIL、HIL到VIL和實路測試,每一個階段都承擔著不可替代的驗證使命,特別是HIL模擬測試,以其在安全性、可重複性、成本效益和測試覆蓋率方面的獨特優勢,已成為現代複雜PNT系統研發流程中的核心環節。
對於致力於此領域的研發工程師而言,深刻理解多感測器融合的內在挑戰,並熟練掌握和運用如OHB XPLORA系列GNSS模擬器、GNSS-INS即時模擬平台、六軸運動平台 (Hexapods)、VHT 高階駕駛研究模擬器以及奧創系統科技提供的HIL模擬測試整體解決方案等先進工具,構建符合自身需求的測試驗證體系,將是其在激烈的技術創新競賽中脫穎而出,並最終交付安全、可靠自動駕駛產品的關鍵所在。
想深入了解OHB XPLORA Pro如何為您的多感測器融合HIL測試提供高傳真、可同步的GNSS訊號環境,或對奧創系統科技如何整合GNSS-INS即時模擬平台、六軸運動平台乃至VHT高階駕駛模擬器,為您量身打造全面的HIL測試解決方案感興趣?立即聯繫我們的技術專家,共同探討最適合您需求的驗證策略。
探索更多關於OHB所有產品在自動駕駛、PNT模擬測試及多感測器融合領域的創新應用。