
自主PNT的「信任之錨」-GNSS/INS融合系統的深度驗證為何至關重要?
在自主系統(如自動駕駛車輛、無人飛行載具、先進機器人)的感知與決策鏈條中,持續、精確、且完整性(Integrity)極高的定位、導航與授時(PNT)資訊,是其安全可靠運行的「信任之錨」;為克服單一全球導航衛星系統(GNSS)在複雜環境中(如都市峽谷、隧道、室內、或遭遇電磁干擾時)的固有限制,GNSS與慣性導航系統(INS)的深度融合已成為提供全場景、高韌性PNT解算的核心技術。這種融合方案能夠結合GNSS的長期絕對精度與INS的短期相對精度及高更新率,實現優勢互補。
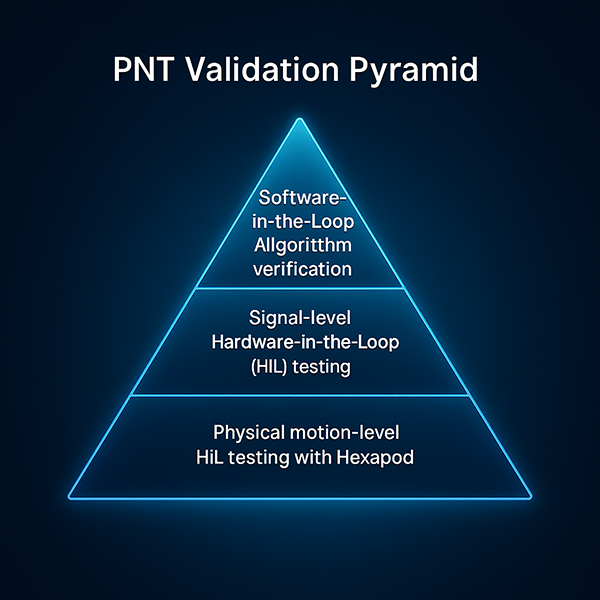
然而,GNSS/INS融合系統的複雜性遠超單一PNT技術,其效能不僅取決於各感測器(GNSS接收機、慣性測量單元IMU)的原始精度,更高度依賴於數據融合演算法(如擴展卡爾曼濾波EKF、無跡卡爾曼濾波UKF、粒子濾波PF等)的設計、感測器誤差模型的精確性、時間同步的嚴謹性、以及在各種動態與環境應力下的穩健性;因此,對GNSS/INS融合系統進行多層次、由虛向實、逐步逼近真實操作條件的深度驗證,是確保其最終能夠在安全關鍵應用中「不辱使命」的根本保障;這一驗證過程,從純粹的軟體迴路(Software-in-the-Loop, SIL)模擬,到引入真實硬體的硬體迴路(Hardware-in-the-Loop, HIL)測試,再到結合六軸運動平台(Hexapod)的物理動態激勵HIL測試,構成了一個不可或缺的、層層遞進的「試煉之路」;本文將深入剖析這一多層次驗證技術的核心內涵、關鍵挑戰以及相應的先進測試解決方案,例如利用CAST GNSS/INS即時模擬平台進行數位訊號層面的融合驗證,以及整合Hexapod六軸平台與XPLORA系列GNSS模擬器進行物理域的極限考驗。
從演算法到實體-GNSS/INS融合PNT多層次驗證的技術架構
一個完整且嚴謹的GNSS/INS融合PNT系統驗證流程,通常包含以下相互關聯且逐步深入的測試層次:
層次一:軟體迴路(SIL)模擬-融合演算法的「沙盤推演」
SIL測試是GNSS/INS融合系統研發的早期階段,其核心目標是在純數位環境中對融合導航演算法的邏輯正確性、收斂特性、精度潛力以及對各種理想/非理想輸入的響應進行全面驗證。
- 核心技術:
- GNSS原始觀測值/PVT數據流的數位模擬:
由GNSS模擬器(或其軟體核心)產生模擬的偽距離、載波相位、都卜勒頻移、導航電文等原始觀測值數據流,或直接產生PVT(位置、速度、時間)解算結果。 - 高傳真IMU數位感測器數據流模擬:
這是SIL測試的關鍵,專業的慣性模擬軟體或平台,如CAST GNSS/INS即時模擬平台的核心功能之一,便是能夠根據預設的六自由度(6-DOF)運動軌跡(可由SATGEN衛星軌道建模軟體等工具精密定義或導入真實路測數據),即時計算並產生與GNSS模擬數據流嚴格時間同步的IMU「理想」輸出(如角增量Δθ和速度增量Δv)。 - 可程式化IMU誤差模型的注入:
更重要的是,能夠在理想IMU輸出基礎上,精確疊加各種典型的IMU感測器誤差,如固定偏置(Bias)、尺度因子(Scale Factor)誤差、軸不對準(Misalignment)、角度/速度隨機遊走(Angular/Velocity Random Walk, ARW/VRW)、溫度相關漂移等。這使得可以在受控條件下,評估融合演算法對不同等級、不同特性IMU誤差的估計與補償能力,以及其容錯性。
- GNSS原始觀測值/PVT數據流的數位模擬:
- 驗證重點:
- 融合演算法(如EKF、UKF)的狀態轉移模型與觀測模型的正確性。
- 演算法的收斂速度、濾波平滑度、PNT解算精度(在不同IMU誤差等級和GNSS訊號品質下)。
- 感測器故障檢測與隔離(Fault Detection and Exclusion, FDE)邏輯的有效性。
- 對GNSS訊號短暫中斷期間,INS航位推算(Dead Reckoning)的精度與漂移特性。
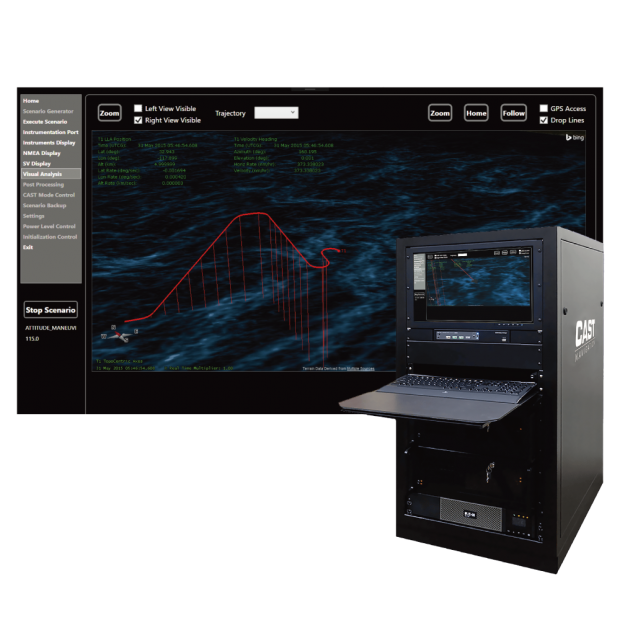
CAST GNSS/INS即時模擬平台是執行GNSS/INS融合演算法SIL測試的理想工具,其能夠精確同步模擬GNSS訊號(通常與外部GNSS RF模擬器配合)與包含詳細誤差模型的IMU數位數據流。
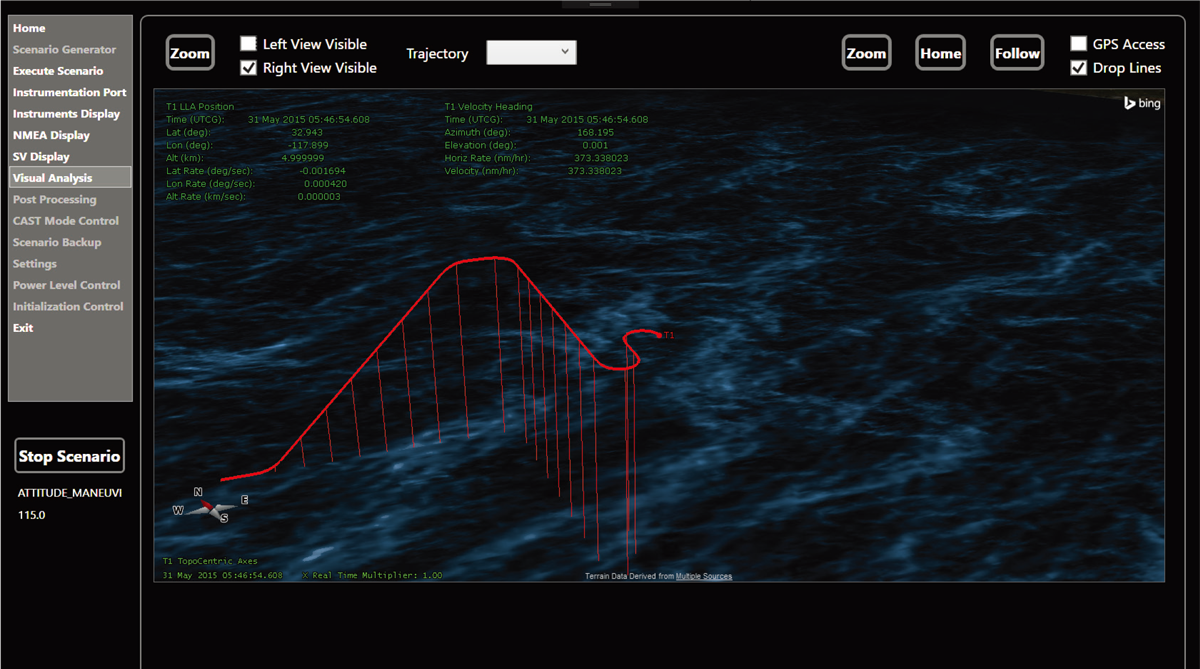
先進的GNSS/INS模擬系統(如CAST Navigation的解決方案)能夠即時呈現複雜的六自由度運動軌跡,並同步輸出高傳真的GNSS與IMU模擬數據,為SIL測試提供豐富的動態場景。
層次二:硬體迴路(HIL)模擬-真實硬體在「訊號級」的實戰演練
當融合演算法在SIL階段得到初步驗證後,下一步是將其部署到真實的目標硬體(如嵌入式處理器、FPGA)上,並將實際的GNSS接收機前端或整個GNSS接收機板卡引入測試環路,進行訊號級的HIL測試。
- 核心技術:
- GNSS RF訊號的即時模擬與注入:
使用高傳真GNSS模擬器(如XPLORA Pro、XPLORA One、CAST 1000可攜式雙頻GNSS模擬器、或CSAT-GNSS射頻訊號建模與模擬系統)產生真實的GNSS RF訊號,直接饋入待測硬體的GNSS天線端口。 - 複雜RF傳播環境的疊加:
透過ACE Client進階通道模擬器或ACE9600,在GNSS RF訊號上疊加多路徑、衰落、遮蔽等真實通道效應。 - 電磁威脅環境的構建:
利用GNSS導航干擾模擬系統或NavTD-M23導航威脅偵測/模擬器,向待測硬體注入可控的Jamming與Spoofing訊號。 - IMU數據的處理:
- 若HIL測試的DUT是完整的GNSS/INS單元(包含真實IMU),則此階段IMU的輸入主要來自其靜態放置或非常有限的運動(此時重點在GNSS RF端的測試)。
- 若DUT僅為GNSS接收機或INS處理器,則仍可由CAST GNSS/INS平台同步提供IMU數位數據流。
- GNSS RF訊號的即時模擬與注入:
- 驗證重點:
- 真實GNSS接收機前端的RF效能、訊號擷取與追蹤環路在各種模擬RF環境下的表現。
- 融合演算法在目標硬體上的即時運算效能、處理延遲、以及與底層硬體驅動的適配性。
- 系統對RF干擾和欺騙的實際抵抗能力(訊號層面)。
- 硬體介面(如SPI, I2C, UART)傳輸IMU或GNSS數據的正確性與即時性。
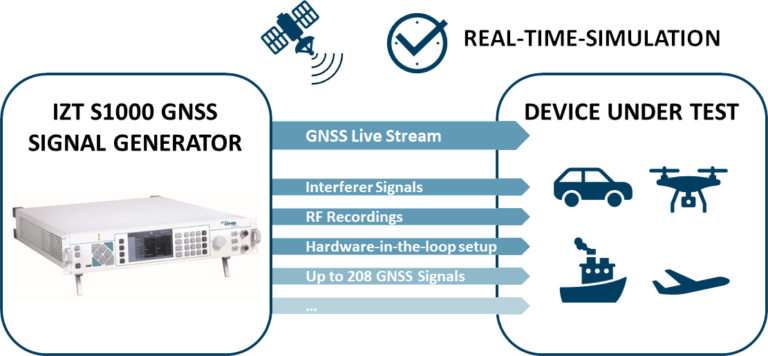
在HIL測試中,如XPLORA系列或CAST系列的GNSS模擬器負責產生高傳真的RF訊號環境,是考驗真實硬體PNT效能的基礎。
層次三:結合六軸運動平台的物理運動HIL模擬-PNT系統的終極「動態試煉」
這是GNSS/INS融合PNT系統驗證的最高級別,它將待測的完整GNSS/INS硬體單元(包含真實的IMU感測器)置於一個能夠精確複現複雜物理運動的環境中,同時向其提供同步的GNSS RF訊號。
- 核心技術:
- 高精度六軸運動平台(Hexapod)的精密動態激勵:
將待測GNSS/INS單元安裝在Hexapod六軸平台(如250kg以下負載或250KG以上負載等不同規格)的頂板上,Hexapod根據預設的或即時生成的六自由度運動軌跡,對DUT施加精確的平移(X, Y, Z)和旋轉(俯仰Pitch、滾轉Roll、偏航Yaw)物理運動。 - GNSS RF環境與物理運動的嚴格同步:
Hexapod的運動必須與GNSS模擬器(及通道/干擾模擬器)產生的RF訊號環境在時間和空間上嚴格同步,即,當Hexapod將DUT移動到軌跡上的某個位置和姿態時,DUT的GNSS天線必須接收到與該位置、姿態和時間完全對應的模擬衛星訊號,這需要一個高階的主控系統來協調所有模擬設備。
- 高精度六軸運動平台(Hexapod)的精密動態激勵:
- 驗證重點:
- 真實IMU感測器的物理響應特性:
包括其在真實動態(加速度、角速度、振動)下的誤差特性(如g敏感性、振動修正效能)、頻寬限制、內部延遲等。 - GNSS天線相位中心變化(PCV)與天線罩效應:
在Hexapod模擬的姿態變化過程中,評估天線PCV的變化以及天線罩對訊號接收的影響。 - 安裝誤差與槓桿臂效應的補償:
驗證PNT系統對IMU與GNSS天線之間安裝偏差(槓桿臂)的測量與補償演算法的準確性。 - 整個GNSS/INS硬體單元在真實物理運動與模擬RF環境下的綜合PNT效能:
包括定位精度、姿態精度(尤其重要)、動態誤差特性、以及在GNSS訊號受擾或中斷期間,結合物理運動的INS航位推算效能。 - 系統對外部振動的敏感性與抑制能力。
- 真實IMU感測器的物理響應特性:
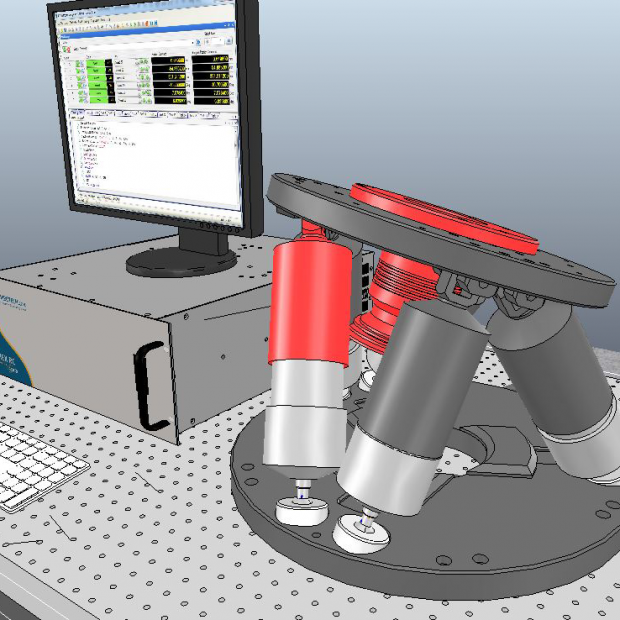
結合高精度六軸運動平台(Hexapod)的硬體迴路(HIL)測試,能夠對GNSS/INS融合PNT系統施加最真實的物理運動激勵,全面驗證其在動態環境下的綜合效能。
GNSS/INS融合系統於HIL/SIL與六軸運動平台之多層次驗證技術
測試層次/目標 |
核心模擬/激勵技術 |
關鍵驗證指標/內容 |
代表性測試設備組合 |
|
軟體迴路 (SIL) - 演算法驗證 |
GNSS原始觀測值/PVT數據流模擬;高傳真IMU數位數據流模擬(含誤差模型);動態軌跡腳本;理想/簡化通道模型。 |
融合導航演算法(如EKF, UKF, 粒子濾波)的精度、收斂速度、穩定性;對不同感測器誤差的敏感性;故障檢測與隔離(FDI)邏輯的有效性。 |
CAST GNSS/INS即時模擬平台(提供同步GNSS/IMU數位數據);SATGEN衛星軌道建模軟體(軌跡與星座定義);可搭配XPLORA系列GNSS模擬器(若需其產生特定GNSS原始觀測值數據流)。 |
|
硬體迴路 (HIL) - 訊號級 |
GNSS RF訊號即時模擬(多星系、多頻、動態);RF通道模擬(多路徑、衰落、遮蔽);可控干擾/欺騙注入;同步IMU數位數據注入(若DUT的IMU部分仍為數位模擬)。 |
真實GNSS接收機前端的RF效能;訊號擷取與追蹤環路在惡劣環境下的表現;協定符合性;融合演算法在真實硬體上的即時運算效能;抗干擾/抗欺騙能力(訊號層面)。 |
XPLORA系列GNSS模擬器/CAST 1000/CSAT-GNSS(GNSS RF);ACE Client進階通道模擬器(通道);GNSS導航干擾模擬系統(威脅);CAST GNSS/INS平台(IMU數位數據)。 |
|
硬體迴路 (HIL) - 物理運動級 |
GNSS RF訊號即時模擬(與物理運動同步);RF通道模擬;可控干擾/欺騙注入;六自由度(6-DOF)高精度物理運動平台(Hexapod)施加動態激勵。 |
真實IMU感測器的物理響應特性(振動、溫度、安裝誤差影響);GNSS天線相位中心變化對定位的影響;整個GNSS/INS硬體單元在真實物理運動與模擬RF環境下的綜合PNT效能、姿態精度、動態誤差特性。 |
定位/姿態精度RMSE;角速率/加速度響應;振動抑制能力;熱漂移特性;安裝誤差校準效果。 |
打造終極PNT試煉場-整合測試平台的架構設計與關鍵技術考量
構建一個能夠有效執行從SIL到HIL(含物理運動)的完整PNT驗證流程的測試平台,是一項複雜的系統工程,其核心在於實現各個模擬子系統(GNSS、INS、通道、干擾、運動)之間的高精度協同與數據的無縫流轉。
構建高傳真GNSS/INS HIL測試平台的關鍵要素
- 奈秒級時間同步:
這是整個HIL測試成功的基石,所有訊號模擬器、運動平台、數據採集系統以及待測硬體之間,必須共享一個統一的、高精度的時間基準(通常由GPS馴服的銣鐘或更高階的時間伺服器提供),確保所有事件和數據流在時間上嚴格對齊。 - 空間參考框架的一致性:
Hexapod的物理運動、GNSS模擬器產生的衛星視線向量、通道模擬器施加的多路徑方向、以及待測物(DUT)自身的座標系定義,必須在一個統一的空間參考框架下進行描述和轉換,以確保模擬的空間一致性。 - 即時閉迴路控制能力:
在某些高階測試場景中(例如,驗證自主系統的飛行控制律或路徑追蹤演算法),待測系統的PNT輸出可能需要即時回饋到模擬環境中(例如,更新Hexapod的運動指令或GNSS模擬器的軌跡),形成一個即時閉迴路。這對整個系統的通訊延遲和處理能力提出了極高要求。 - 全面的數據記錄、監控與分析:
需要能夠同步記錄所有模擬輸入(GNSS RF特性、IMU模擬數據、通道參數、干擾訊號、Hexapod運動狀態等)、待測硬體的PNT輸出以及其他關鍵內部參數,並提供強大的後處理工具進行效能評估、誤差分析與故障定位,輔助工具如XPLORA-Trace GNSS記錄與分析方案或GIDAS系列干擾偵測與分析系統在此環節可提供數據洞察。
Hexapod運動模擬的技術細節與應用優勢:賦予HIL測試「真實的靈魂」
六軸運動平台 (Hexapod),如奧創系統提供的系列解決方案,以其獨特的並聯運動機構,為PNT硬體迴路測試帶來了傳統單軸或多軸旋轉台難以比擬的優勢:
- 全六自由度(6-DOF)精密運動模擬:
能夠同時在三個平移維度(X, Y, Z)和三個旋轉維度(俯仰Pitch、滾轉Roll、偏航Yaw)上實現高精度、高動態範圍的運動複現。 - 高剛性與高承載能力:
能夠承載不同尺寸和重量的待測PNT單元及其輔助設備。 - 靈活的運動軌跡程式設計:
可以接收來自上位控制軟體(如HIL主控電腦)的即時運動指令,或執行預先編程的複雜運動序列,精確模擬從微小振動到劇烈機動的各種動態。 - 在GNSS/INS測試中的獨特價值:
- IMU感測器特性精密標定:
施加精確的角速率和線加速度,全面標定IMU的偏置、尺度因子、非線性、軸交叉耦合等誤差。 - 天線相位中心/群延遲校準:
透過特定運動掃描,精確確定GNSS天線的相位中心變化(PCV)和群延遲特性。 - 高動態環境下的融合演算法驗證:
考驗GNSS/INS融合演算法在真實物理加速度、角速度以及振動環境下的解算穩定性、姿態精度以及對槓桿臂效應的補償能力。 - 模擬特定安裝條件下的效能:
將PNT單元以其在最終載具上的實際安裝角度固定在Hexapod上,評估安裝位置和姿態對PNT效能的影響。
- IMU感測器特性精密標定:
面臨的挑戰與解決方案:整合的藝術與專業的價值
構建和運維這樣一個高度複雜的PNT HIL測試平台,本身也面臨諸多挑戰,如高昂的初期投資、多廠商設備的整合與精密校準、大量測試數據的有效管理與分析、以及對測試人員技能的高要求等。應對這些挑戰,通常需要:
- 採用模組化、開放式的系統架構,便於未來升級與功能擴展。
- 選擇具備標準化介面與良好互操作性的儀器設備。
- 投資於強大的測試自動化與數據管理軟體平台。
- 依賴具備深厚PNT測試知識和豐富系統整合經驗的專業團隊,如奧創系統 (Ultrontek),提供從方案設計、系統搭建、軟體開發到技術支援的全方位服務。
邁向PNT的「數位現實」-HIL與物理模擬賦能下一代高可靠導航的終極保障
PNT系統的極限考驗,其終極目標是確保在任何可預見的,乃至部分不可預見的極端條件下,自主系統都能獲得持續、準確、高完整性的時空參照,從純粹的軟體迴路(SIL)演算法驗證,到引入真實硬體的訊號級硬體迴路(HIL)測試,再到結合六軸運動平台(Hexapod)的物理運動級HIL測試,構成了一個由虛向實、逐步逼近真實操作環境的完整PNT驗證金字塔。
這個金字塔的頂端——即整合了高傳真GNSS訊號與軌道模擬(如XPLORA系列、CAST 1000、CSAT-GNSS)、精密RF通道再現(如ACE Client)、可控電磁威脅注入(如GNSS導航干擾模擬系統)、以及同步INS數據模擬(如CAST GNSS/INS平台)與物理動態激勵(如Hexapod六軸平台)的綜合測試環境——正是我們所謂的PNT「數位現實」,它使得在產品部署前就能夠對PNT系統的極限效能、潛在缺陷以及在安全關鍵場景下的穩健性進行最為徹底的「摸底」與「淬鍊」。
展望未來,隨著自主系統的智能化水平不斷提升,對PNT「數位現實」測試平台的要求也將水漲船高,AI技術不僅將用於更智慧的測試案例生成、更逼真的環境建模,甚至可能用於即時評估和優化PNT系統的自主決策,更複雜的多感測器融合HIL測試(如整合視覺、光達、雷達等模擬)以及對PNT功能安全(FuSa)與預期功能安全(SOTIF)的量化驗證,將成為新的技術制高點。
奧創系統 (Ultrontek) 憑藉其在PNT測試與模擬領域的深厚積累和對前沿技術的持續投入,致力於為客戶打造世界一流的SIL/HIL及物理運動模擬測試解決方案;我們提供的不僅是單點的先進測試儀器(涵蓋GNSS/INS訊號產生、RF環境模擬、精密運動控制等全鏈路),更是將這些組件高效整合為一個協同運作、高度自動化、並能精確滿足您特定驗證需求的「PNT終極試煉場」的專業能力與服務,相關產品如XPLORA系列GNSS模擬器、CAST GNSS/INS即時模擬平台、ACE Client進階通道模擬器以及Hexapod六軸運動平台均為構成此類先進測試環境的核心;若您正投身於開發下一代高可靠、安全關鍵型的PNT系統,並尋求最頂級的測試驗證夥伴,歡迎隨時與奧創系統 (Ultrontek) 的專家團隊聯繫,讓我們共同為PNT技術的未來,鑄造最堅實的信任基石。