
精準模擬高動態 GNSS/INS:克服 IMU 行為複製與同步挑戰
高精確度 GNSS/INS 同步能力的開發與精進,對於模擬具有高強度動態特性的系統至關重要;然而,若缺乏正確且精確驅動捷聯式 IMU (Strapdown Inertial Measurement Unit) 介面的能力 —— 所謂捷聯式,是指其慣性感測器(陀螺儀、加速度計)是直接固定於載具本體上,隨載具一起運動,而非裝載於穩定平台上,因此必須透過複雜計算來解算出姿態與導航資訊的慣性測量單元 —— 則要達成(前述的精確 GNSS/INS 同步模擬)幾乎是不可能的任務; IMU 的實地測試成本與時間效益是一大考量;若無模擬器輔助,IMU 必須在地面或空中進行實際測試,此過程可能產生高昂的費用並耗費大量時間。
評估嵌入式 GNSS/慣性導航系統 (EGI) 的複雜性尤其突顯了模擬器的必要性;在缺乏模擬器的情況下,由於需要協調多重感測器輸入與動態行為,對 EGI 進行全面評估變得特別複雜; 執行 GNSS/INS 同步模擬的核心要求,在於必須對眾多導航訊號進行精確且協調的模擬,並與緊密耦合 (Tightly Coupled) 或超緊密耦合 (Ultra-Tightly Coupled) 的 GNSS/INS 導航系統進行互動。 模擬器驅動 IMU 介面的精確度,往往是區分其效能的關鍵;模擬器能否正確且精確地驅動 IMU 介面,直接影響到是否能有效理解、測試及驗證高階系統中的 GNSS/INS 效能,因此成為重要的差異化指標。
槌球挑戰
捷聯式 IMU 的品質指標,主要由其內建陀螺儀和加速度計的量測精確度,以及訊號處理流程的效率和各類誤差源的最小化程度來定義;這些誤差源包括偏置誤差 (bias errors)、速度誤差 (velocity errors)、平台傾斜 (platform tilt),以及因慣性感測器頻寬限制所引發的誤差。 IMU 模擬的類比說明,不同於 GNSS 系統是從點到點確定位置;模擬 IMU 以確保其正常運作的過程,就好比打槌球時需將球精準地擊過一系列球門,這需要在預定路徑上進行穩定且經過計算的逐步推進;若施力過猛,便會錯失球門而偏離正確路徑,且難以輕易修正。驅動 IMU 進行模擬的過程,需要先給定一個起始位置,然後透過一連串的刺激訊號逐步推進;此過程必須正確地建立 IMU 模型,審慎考量 GNSS 訊號的同調性 (coherence),並納入如圓錐運動 (coning)、划槳運動 (sculling) 等動態效應的數值,以及其他誤差來源,例如固有的感測器偏置和個別感測器的隨機雜訊,這些都是確保模擬真實性的關鍵因素。
軍事及政府實驗室對動態地面測試有嚴格規範;這些單位對於新型導航系統在投入實際飛行測試之前,必須進行的動態地面測試設有極其嚴格的要求。 RF 模擬器在重現真實飛行條件中的作用不可或缺;透過運用高傳真度的感測器誤差模型,模擬器能夠在施加的慣性刺激訊號中疊加模擬的誤差,藉此實現更為全面的整體系統模擬,從而允許進行更貼近實際應用場景的系統級效能IMU 量測。

複製真實性
CAST INS 系統的核心功能在於能夠以高度協調且連貫(coherent)的方式,同步模擬 EGI 及 GNSS/INS 系統中的 GNSS 與 INS 兩個部分的動態行為;如此可確保 GNSS 與 INS 的導航解算結果不會隨時間發散,並且其解算出的狀態(如位置、速度、姿態)能精確地反映真實世界中應有的情況(參見圖 1),維持單一且一致的導航方案。 CAST INS 系統輸出真實 IMU 量測數據的技術基礎,源於其獨特的 INS 模擬方法,使其能夠產生非常逼真的 IMU 量測數據。 相較於傳統的誤差模型疊加法,CAST 的模擬方法更貼近真實 INS 的運作原理;有些模擬器是先建構一個 INS 誤差模型,再將其輸出的誤差值疊加到理想的(無誤差的)使用者狀態上;而 CAST 系統則採取不同的策略。
CAST INS 系統直接驅動慣性量測介面;它在電氣層面上斷開實際的感測器,或可理解為「讓陀螺儀和加速度計進入休眠狀態」,然後將計算出的速度增量 (delta V) 和角度增量 (delta θ) 訊號直接饋入導航系統的卡爾曼濾波器 (Kalman filter),以此方式來測試系統在動態環境下的反應;透過這種方法,EGI 便能將原始的 IMU 量測數據(如同從真實感測器讀取一般)輸出至待測試的 GPS 接收器,這使得使用者能夠有效測試那些與捷聯式 IMU 進行緊密整合的 GPS 接收器,因為此測試方式忠實模擬了真實的資料流。
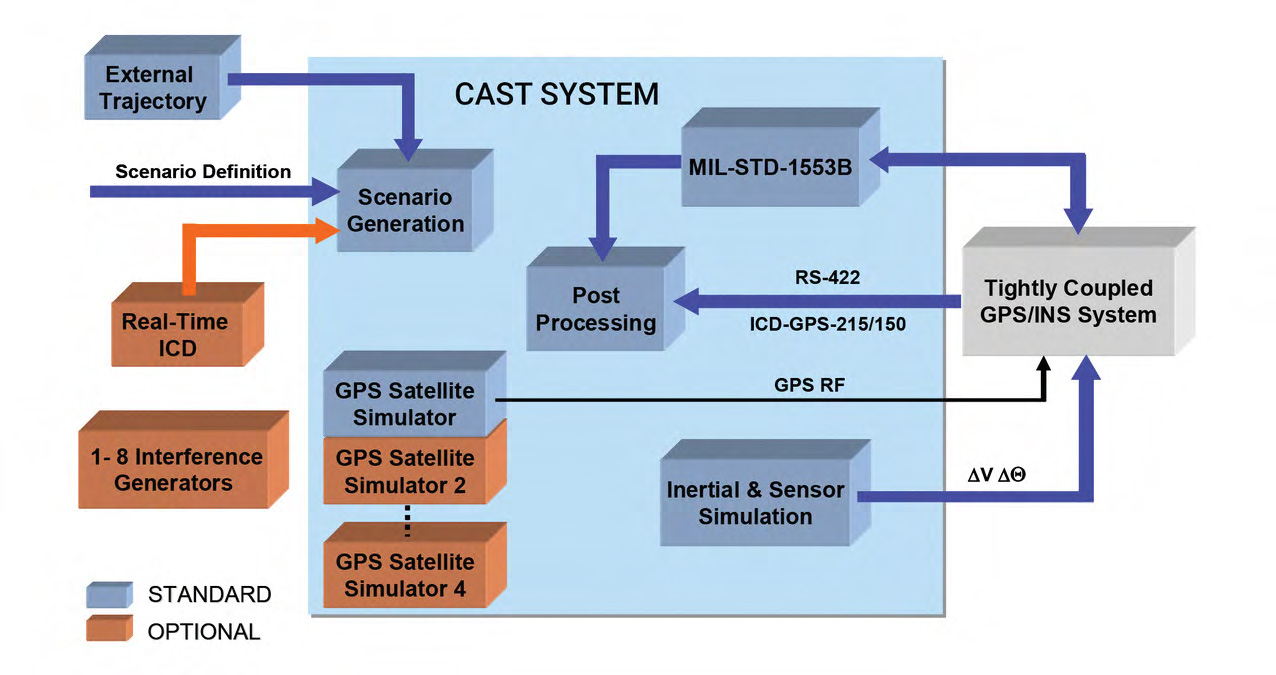
圖 1:CAST INS 系統方塊圖。
CAST INS 系統模擬過程的第一步是建立理想模型;系統首先利用一個描述慣性系統完整物理特性的全狀態模型 (whole-state model),計算出完全無誤差的慣性量測基準值,藉此模擬一個理想狀態下的 IMU;接著,系統導入感測器誤差以模擬真實情況;它運用詳盡的感測器誤差模型,將模擬的誤差疊加到前一步計算出的理想量測值上,最終模擬出接近真實 IMU 的輸出訊號。
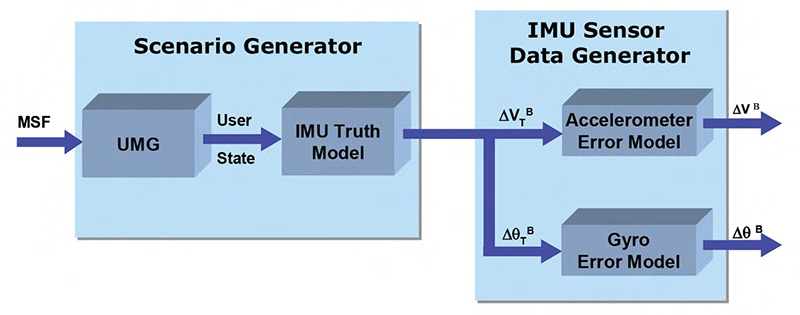 圖 2:CAST-3000 內部的 IMU 模擬功能。
圖 2:CAST-3000 內部的 IMU 模擬功能。
使用者運動軌跡的定義與生成過程,如圖 2 所示;使用者欲模擬的運動輪廓由 MSF(運動區段檔案 Maneuver Segments File)定義,UMG(使用者運動產生器 User Motion Generator)負責將此檔案中定義的各段運動指令展開,轉換成一條完整的運動軌跡,此軌跡由一系列不同時間點的使用者狀態(位置、速度、姿態等)所描述,IMU 真實模型則根據這些使用者狀態,計算出理想(無誤差)的比力 (specific force) 和姿態 (attitude) 值; 感測器資料的生成與誤差注入流程如下:感測器資料產生器首先利用陀螺儀誤差模型,根據姿態的變化量計算出無誤差的 Delta θ 量測值,然後再將模擬的陀螺儀誤差疊加上去;與此同時,加速度計誤差模型則將模擬的加速度計誤差疊加到理想的比力量測值上。
最終的模擬數據輸出階段,計算完成的 Delta θB(代表機體座標系下的角度增量)和 Delta VB(代表機體座標系下的速度增量)會經過適當的格式化處理,確保其符合待測系統介面的要求;然後,這些數據會透過指定的硬體介面,以精確的時序輸出給待測裝置,確保與 GNSS 訊號的同步性。
CAST INS 系統自動處理檔案讀取與格式化;系統讀取設定檔,執行所有必要的資料格式轉換,並確保量測數據能透過正確的介面,以符合規範的精確時序輸出。
CAST INS 系統
EMCORE 公司作為業界領導者,高度依賴模擬器進行硬體迴路測試;該公司專精於混合訊號光學技術以及為航太與國防系統提供源自 Systron Donner Inertial 的 MEMS(微機電系統 Micro-Electro-Mechanical Systems)慣性產品,他們廣泛使用 GNSS/INS 模擬器來執行硬體迴路 (HIL) 測試,目的是在實際部署前驗證其複雜演算法的預期效能。
EMCORE 資深現場應用工程師 Andy Williams 強調現場測試準備的重要性,他解釋道:「很少有事情比一次成功的現場測試更令人有成就感;相對地,也很少有事情比一次失敗的現場測試更令人尷尬且具有破壞性,因此,在合理範圍內盡可能徹底地對系統進行審查驗證是絕對必要的;而硬體迴路測試正是此審查驗證過程中不可或缺的關鍵環節。」 Andy Williams 進一步說明 CAST 模擬器在 EMCORE 測試流程中的具體應用:「要對 GNSS/IMU 裝置進行適當且全面的評估,關鍵在於必須能夠精確地複製 IMU 的動態行為,並且將其與對應特定飛行路徑的 GNSS 射頻訊號進行嚴格同步;CAST 模擬器恰好能為我們的 GNSS/IMU 系統提供所需的無誤差 IMU 基準資料,」「在實際測試中,GNSS/IMU 系統會即時地接收來自 CAST 模擬器的理想慣性資料,並利用系統內部陀螺儀和加速度計讀取的實際資料(包含其固有的不完美性)對其進行擾動,以此方式來複製真實感測器的不完美特性;與此同時,GNSS/IMU 系統也從 CAST 模擬器接收與無誤差 IMU 資料同步的 GNSS 射頻訊號,這樣一來,我們就能夠以相對簡易且極具成本效益的方式,在多種模擬的操作情境下,全面地測試驗證我們的導航演算法。」
透過模擬達成戰術穩健性
EMCORE 近期研究的核心目標,在於驗證一款新型 GNSS 接收器的極限速度與極限高度操作能力,同時評估其整合於戰術級 GNSS/INS 系統 SDN500 中的演算法效能;此 SDN500 系統廣泛應用於多種軍事及民用領域,特別是那些需要在嚴苛環境條件下,甚至在 GNSS 訊號被拒止(denied)時,仍需維持戰術級導航效能的應用場景;部分應用情境甚至觸及外太空邊緣(定義為 100 公里高度); 此項驗證測試面臨的極端條件挑戰,要求系統能夠應對超過 24,000 公尺的飛行高度以及超過 600 公尺/秒的飛行速度;全球僅有極少數的航空器具備達成此類飛行剖面的能力;雖然搭乘 SR-71 黑鳥式偵察機進行實機試飛的想法或許吸引人,但從成本、資源調度及安全性的角度來看,這顯然不切實際。
相較之下,模擬測試提供了高效且可行的替代方案;運用 CAST 系統來模擬整個試飛過程不僅可行,而且相對容易執行。 CAST GNSS/INS 模擬系統在此測試中的角色,是負責產生與使用者預先定義的飛行軌跡完全對應的 GNSS 射頻訊號和 IMU 模擬訊號,兩者需保持精確同步。 在硬體迴路測試設置中,SDN500 的運作方式如下:該系統從 CAST 模擬器接收對應飛行軌跡的動態慣性資料流,並將此理想資料與其內部 IMU 感測器實際讀取到的、帶有不完美性的慣性資料進行結合;與此同時,SDN500 內建的 GNSS 接收器同步接收來自 CAST 系統所發出的 GNSS 射頻訊號,此 RF 訊號與慣性資料流是精確同步的;接著,SDN500 的導航處理器運用結合後的慣性資料以及 GNSS 接收器的輸出(如偽距、都卜勒頻移等),透過其導航演算法計算出完整的導航解算(位置、速度、姿態),並提供給使用者;這種硬體迴路測試方法的優勢在於,它使用了被實際 IMU 感測器特性即時擾動過的慣性資料,以及來自嵌入式 GNSS 接收器的真實即時輸出,相較於等效的純軟體模擬,能夠更精確地呈現並評估 SDN500 系統在實際運作下的真實效能。
測試流程的起始階段是在地面進行靜態初始化;測試開始於一段地面靜止期,讓 GNSS/SDN500 系統完成必要的初始化程序,並順利轉換至空中導航模式;隨後進入動態飛行階段以確保系統可觀測性;在初始的靜置階段結束後,模擬的飛行軌跡進入一系列預先設計的機動飛行動作(maneuvers),這些動作的目的是為了提供足夠的動態變化,以確保系統內部的各種狀態參數(如感測器誤差、位置、速度等)具有良好的可觀測性 (observability),這也反映在相對應的計算出的效能指標 (figures of merit) 變化上;接著,測試情境模擬速度與高度的劇烈變化;飛行情境隨後繼續經歷一系列的速度和高度改變階段;關鍵的驗證點在於 GNSS 中斷與恢復期間的穩定性;在模擬過程中,於每個 GNSS 訊號被刻意中斷(遺失)或恢復的階段,系統的導航解算在整個 GNSS 中斷期間以及後續訊號重新捕獲 (reacquisition) 的過程中,均能保持穩定且精確。
此次測試所檢驗的關鍵動態限制條件被嚴格執行,包括:
- 驗證系統在達到 24,000 公尺最大設計高度時的行為。
- 驗證系統在達到 600 公尺/秒最大設計速度時的行為。
- 驗證系統是否符合 COCOM(已失效,但其限制常被引用作為參考)針對潛在軍事應用所設定的組合限制,即同時處於高空(18,000 公尺)和高速(1000 節 / 約 514 公尺/秒)狀態下的運作情況。
真實參考
圖 3 直觀展示了 GNSS/INS 模擬測試的部分關鍵結果;該圖表彙整了測試過程中的重要數據。 測試剖面涵蓋了從起飛到高空高速飛行的完整過程;如圖所示,模擬系統從地面靜止狀態啟動,隨後起飛並爬升至 25,000 公尺的高度(此高度略微超過了製造商定義的絕對最大操作高度 24,000 公尺),接著高度下降至約 15,000 公尺(觀察圖 3b 中時間軸 2.1 至 2.2 之間的變化即可得知)。
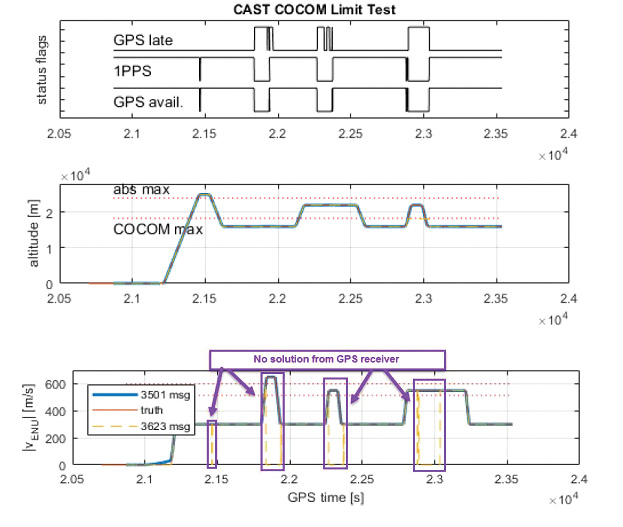 圖 3:GNSS 接收器限制測試結果。
圖 3:GNSS 接收器限制測試結果。
圖表 3a 追蹤了 GNSS 的可用狀態;最上方的圖表(3a)繪製了 SDN500 系統內部指示 GNSS 可用性的狀態旗標變化情況;圖表 3b 顯示了飛行高度變化;第二個圖表(3b)則追蹤記錄了整個模擬飛行過程中的高度變化曲線;圖表 3c 比較了計算速度與真實速度;第三個圖表(3c)展示了由 SDN500 計算出的速度量值(magnitude of velocity)與由 CAST 系統提供的真實參考軌跡速度(以實心橘線表示)的比較。
分析高空限制下的 GNSS 行為;作為一個例子,請留意在時間點 2.15 附近,當模擬高度達到 25,000 公尺時,圖 3a 顯示發生了一次短暫的 GNSS 訊號中斷(dropout),但並未觸發延遲旗標(late flag);這個現象證明了,正如 GNSS 接收器規格文件中通常會註明的那樣,儘管接收器或許能在超過 24,000 公尺的標稱最大高度下繼續運作,但其效能是不被保證的;之後,模擬的飛行路徑高度下降並一直保持在最大操作高度以下;接著分析高速限制下的 GNSS 行為;隨後,模擬速度增加至超過 600 公尺/秒的限制,此時 GNSS 接收器停止提供 1PPS(每秒脈衝 Pulse Per Second)時間同步訊號以及位置/速度解算輸出,直到模擬速度降低到 600 公尺/秒的最大限制值以下為止;從圖中可以看出,SDN500 系統在大約時間點 "2.2" 時已回報恢復完整的 GNSS 運作,並提供精確的導航解算。
CAST 模擬情境接著測試了 COCOM 限制條件;首先執行的序列是高度先超過 18,000 公尺,然後速度再超過 514 公尺/秒;值得注意的是,必須同時違反這兩個限制條件後,GNSS 接收器才會停止提供 1PPS 訊號及位置/速度解算;接下來,測試序列反轉,先讓速度超過 COCOM 限制,然後再讓高度超過限制,結果同樣需同時滿足條件才會觸發 GNSS 停止輸出。
整個測試過程中最核心的發現在於,代表 SDN500 導航解算的藍色 3501 訊息資料線,與代表 CAST 模擬器輸入的真實軌跡橘色線,在幾乎所有時間點都完美重疊;尤其關鍵的是,即使在 GNSS 接收器沒有有效輸出的時段(例如超出操作限制或模擬訊號中斷時),兩條線依然高度吻合,這有力地證明了系統僅依靠 IMU 也能維持極高的導航精度。 Andy Williams 對此結果做出了解釋:「在那些 GNSS 接收器無法提供有效解算的時段裡,我們的導航演算法僅憑藉來自 IMU 的數據,依然能夠維持著極為精確的導航解算;此外,當 GNSS 接收器恢復運作並重新向演算法提供有效解算時,整個系統並未出現任何演算法不穩定或輸出不連續的現象;縱觀整個複雜的飛行剖面,即使在 GNSS 訊號遺失的情況下,SDN500 系統始終保持了精確的導航解算,EGI 維持了精確的導航解算;若沒有 CAST 系統所提供的、經過精密同步的 GNSS 射頻訊號以及與飛行軌跡完美匹配的 IMU 資料,要完成這樣嚴苛且全面的測試是根本不可能的。」
最終的測試結論與效益:EMCORE-SDI 公司藉由 CAST 系統,得以快速且便捷地確認了其 SDN500 產品搭載新型 GNSS 接收器後,確實達到了 3.9 公尺 SEP(球面誤差機率 Spherical Error Probable)的位置精度、1.5 mrad 的航向精度以及 1.0 mrad 的俯仰/滾轉姿態精度,並且驗證了其在 GNSS 訊號降級環境下(例如訊號遮蔽或干擾),用於導航、平台穩定和地理定位應用的擴展自由慣性(free-inertial)效能;這一切的實現,不僅避免了執行成本高昂且耗時的實際飛行測試,更顯著提升了工程設計驗證和產品鑑定測試的整體效率;若非依賴 CAST Navigation 系統所提供的先進模擬器功能,要在如此短的時間內達成這樣全面的驗證成果是難以想像的。
干擾管理
CAST INS 系統具備與待測系統互動以記錄干擾相關數據的能力;此模擬器能夠以特定方式與待測的 GNSS/INS 導航系統進行介面連接,從而可以記錄下來自 GNSS 接收器所輸出的、報告干擾相關數值的導航訊息(例如 NMEA 或其他專有格式訊息);這些被記錄的數值通常包含干擾雜訊比 (J/S ratios)、可追蹤衛星的方位角 (Azimuth) 和仰角 (Elevation),有時甚至可能包含個別衛星的偽距 (pseudoranges) 量測值;這項記錄功能簡化了測試報告的產出;透過將這些關鍵的干擾指標記錄並提供給使用者,能夠極大地簡化後續測試報告的撰寫與數據分析過程,因為重要的原始數據已經被系統捕獲。
系統支援多通道獨立控制的干擾訊號生成;該系統最多能夠同時處理八個可獨立控制的干擾訊號源;對於每一個干擾產生器,使用者都可以獨立設定其運動參數,包括速度、高度以及飛行軌跡剖面;支援多種干擾波形模式;系統支援的干擾模式涵蓋了多種類型,包括連續波 (CW)、脈衝連續波、掃頻連續波、調頻雜訊 (FM Noise)、脈衝調頻雜訊 (Pulsed FM Noise),以及寬頻雜訊,提供了靈活的干擾環境模擬能力。
面對前文所述日益複雜的 GNSS 測試挑戰,選擇合適且功能強大的模擬與測試工具至關重要,奧創系統長期深耕衛星與慣性導航模擬技術,提供一系列從基礎到高階應用的完整解決方案,能協助工程師在實驗室環境中,精確再現各種真實世界情境,驗證與強化導航系統的性能與可靠度。
依據不同的測試需求與應用場景,奧創系統提供相應的解決方案:
- 基礎與可攜式模擬需求:
- CAST-1000 可攜式雙頻 GNSS 模擬器:提供輕巧便攜的選擇,支援雙頻訊號模擬,適合現場測試或基礎實驗室應用。
→ 了解更多
- CAST-1000 可攜式雙頻 GNSS 模擬器:提供輕巧便攜的選擇,支援雙頻訊號模擬,適合現場測試或基礎實驗室應用。
- 彈性化通用 GNSS 模擬:
- 衛星模擬器 - XPLORA One 及 XPLORA Pro:具備高度彈性與可擴展性,可滿足從入門到進階的各種通用 GNSS 訊號模擬需求,支援多種衛星星系與頻段。
→ XPLORA One | XPLORA Pro
- 衛星模擬器 - XPLORA One 及 XPLORA Pro:具備高度彈性與可擴展性,可滿足從入門到進階的各種通用 GNSS 訊號模擬需求,支援多種衛星星系與頻段。
- 高傳真 RF 訊號模擬核心:
- CAST GNSS 射頻訊號建模與模擬系統 (CSAT-GNSS):作為高階模擬的核心平台,提供高傳真度的 GNSS RF 訊號建模與生成能力,是建構複雜測試環境的基礎。
→ 了解更多
- CAST GNSS 射頻訊號建模與模擬系統 (CSAT-GNSS):作為高階模擬的核心平台,提供高傳真度的 GNSS RF 訊號建模與生成能力,是建構複雜測試環境的基礎。
- 特定挑戰模擬 - 干擾環境:
- GNSS 導航干擾訊號建模與模擬系統:專門用於重現複雜的電磁干擾環境,可模擬多種類型與動態變化的干擾訊號,以驗證接收器的抗干擾性能。
→ 了解更多
- GNSS 導航干擾訊號建模與模擬系統:專門用於重現複雜的電磁干擾環境,可模擬多種類型與動態變化的干擾訊號,以驗證接收器的抗干擾性能。
- 特定挑戰模擬 - CRPA/相控陣列天線:
- CAST-CRPA 相控陣列與姿態判定導航模擬系統:針對本文重點討論的 CRPA 系統,提供精確的相位同調多路訊號輸出,支援相控陣列天線波束成形、抗干擾演算法驗證及姿態判定等高階應用。
→ 了解更多
- CAST-CRPA 相控陣列與姿態判定導航模擬系統:針對本文重點討論的 CRPA 系統,提供精確的相位同調多路訊號輸出,支援相控陣列天線波束成形、抗干擾演算法驗證及姿態判定等高階應用。
- 整合系統測試 - GNSS/INS 融合:
- CAST GNSS-INS 即時動態訊號模擬測試系統:支援 GNSS 與慣性導航系統 (INS) 的緊密耦合測試,可進行即時動態模擬,全面驗證 EGI (嵌入式 GPS/INS) 等整合導航系統的性能。
→ 了解更多
- CAST GNSS-INS 即時動態訊號模擬測試系統:支援 GNSS 與慣性導航系統 (INS) 的緊密耦合測試,可進行即時動態模擬,全面驗證 EGI (嵌入式 GPS/INS) 等整合導航系統的性能。
- 高可靠應用 - 太空等級驗證:
- 星載接收機 - Spaceborne:除了模擬器,奧創系統亦提供如 Spaceborne 這類高可靠度的星載 GNSS 接收機,其開發與驗證過程同樣受益於前述的嚴謹模擬測試流程,確保在極端太空環境下的穩定運作。
→ 了解更多
- 星載接收機 - Spaceborne:除了模擬器,奧創系統亦提供如 Spaceborne 這類高可靠度的星載 GNSS 接收機,其開發與驗證過程同樣受益於前述的嚴謹模擬測試流程,確保在極端太空環境下的穩定運作。
透過奧創系統專業的模擬測試解決方案,開發者與整合商能夠更有信心地應對 GNSS 技術的挑戰,加速產品開發週期,並確保最終產品的卓越性能。