
「不間斷之眼」:透過先進GNSS/INS模擬與通道模擬技術,實現全場景高完整性自主系統導航
自主系統的導航命脈-對連續、可信PNT資訊的極致追求
自主系統,涵蓋自動駕駛車輛、無人飛行載具(UAVs或稱無人機)、自主移動機器人(AMRs)乃至更廣泛的自動化設備,正以前所未有的速度重塑各行各業。這些系統的核心運作高度依賴於持續、精確且最重要的是可信賴的定位、導航與授時(Positioning, Navigation, and Timing, PNT)資訊;然而,單純依賴全球導航衛星系統(GNSS)往往難以滿足自主系統在所有操作環境下的嚴苛需求,尤其是在訊號易受遮擋(如都市峽谷、隧道、室內)、多路徑干擾嚴重或存在無線電頻譜故意/無意干擾的挑戰性場景中。
為克服GNSS的固有局限性,GNSS與慣性導航系統(Inertial Navigation System, INS)的深度融合已成為實現高完整性與連續導航的關鍵技術路徑。INS能夠在GNSS訊號品質下降或短暫中斷時提供自主的導航解算,但其自身誤差會隨時間累積。兩者的有效融合,可以取長補短,顯著提升PNT解決方案的整體效能與可靠性。
然而,如何嚴謹、全面且高效地測試這些複雜的GNSS/INS融合系統在各種預期及非預期操作條件下的表現,成為自主系統開發與驗證流程中的核心挑戰。這正是先進的GNSS模擬、INS感測器模擬(包括數位模擬與物理運動模擬)、RF通道模擬以及干擾模擬等技術發揮關鍵作用的領域,它們使得在實驗室環境中創建可重複、可控制的高傳真測試場景成為可能。本文將深入剖析這些模擬技術如何協同運作,以確保自主系統這隻「不間斷之眼」在全場景下的導航完整性。
自主導航的基石-GNSS/INS深度融合與高完整性PNT的技術內涵
GNSS於自主系統的機遇與固有挑戰
GNSS(如GPS、GLONASS、Galileo、BeiDou等多星系)為自主系統提供了全域、全天候的絕對定位能力,多頻率多星系的接收能力更進一步提升了定位精度與可用性。然而,其訊號從數萬公里外的太空傳來,到達地面時已非常微弱,易受多種因素影響:
- 訊號遮擋(Obscuration):
高樓、橋梁、隧道、濃密樹葉等均可導致訊號中斷。 - 多路徑效應(Multipath Effect):
訊號經周圍物體反射後產生多個路徑到達接收天線,造成測距誤差和定位漂移。 - 無線電干擾(Interference):
無論是無意的(如來自其他電子設備的帶外輻射)還是故意的(如Jamming),都會嚴重降低GNSS接收器的訊噪比,甚至使其無法追蹤衛星。 - 訊號欺騙(Spoofing):
惡意發射偽造的GNSS訊號,誘使接收器計算出錯誤的PNT資訊,對自主系統構成嚴重安全威脅。
慣性導航系統 (INS) 的角色與特性
慣性導航系統 (INS) 是一種自主導航技術,它利用慣性測量單元(Inertial Measurement Unit, IMU)內部的高精度加速度計(Accelerometers)和陀螺儀(Gyroscopes)來感知載體的線加速度和角速度,進而透過積分運算推算出載體的位置、速度和姿態(Position, Velocity, Attitude, PVA)。
- 優勢:INS完全自主,不依賴任何外部訊號,因此不受GNSS訊號遮擋或干擾的影響;其數據更新率高,能夠提供平滑且連續的運動軌跡。
- 劣勢:由於積分運算會不斷累積感測器的微小誤差(如偏置誤差Bias、尺度因子誤差Scale Factor Error、隨機遊走Random Walk等),INS的定位誤差會隨時間(或距離)快速發散,需要外部資訊(如GNSS)進行定期校正。
GNSS/INS深度融合的技術優勢
將GNSS與INS進行有效融合,特別是採用緊密耦合(Tightly Coupled)或深度耦合(Deeply Coupled)的融合架構,能夠顯著提升整體PNT解決方案的效能:
- 互補性:GNSS提供長期的絕對定位精度,用於校正INS的累積誤差;INS則在GNSS訊號品質差或短暫中斷時,提供短期的連續、高更新率導航輸出。
- 提升GNSS訊號追蹤能力:在弱訊號或高動態環境下,INS可以輔助GNSS接收器的訊號追蹤環路,提高鎖星的穩健性。
- 改善PNT解算精度與連續性:即使在GNSS可見衛星數不足以獨立定位時(例如少於4顆星),緊密耦合的融合系統仍可能利用這些衛星的觀測值結合INS數據輸出有效的導航解。
- 增強完整性監測:透過GNSS與INS數據的一致性檢查,可以更有效地偵測和隔離故障(如單顆衛星故障、或IMU感測器異常),提升PNT資訊的完整性(Integrity)。
高完整性PNT對自主系統的至高意義
對於自主系統而言,PNT資訊的完整性比單純的精度有時更為重要,完整性指的是對PNT資訊可信度的度量,以及當PNT系統不能滿足特定操作要求的精度或可用性時,能夠在規定時間內向系統發出告警的能力;在安全關鍵的自主駕駛或飛行應用中,錯誤或不可靠的導航資訊可能導致災難性後果,因此,確保PNT系統的高完整性輸出是設計與驗證的首要目標。
先進模擬技術-打造全場景、高傳真自主系統導航測試環境
要全面驗證自主系統中複雜的GNSS/INS融合導航系統的效能與完整性,僅僅依賴實場測試是遠遠不夠的;先進的模擬技術,能夠在實驗室中創建可控、可重複、且極端逼真的測試場景,是不可或缺的手段。
GNSS訊號模擬的精進:從基本軌跡到複雜高精度場景
現代GNSS模擬器早已超越簡單的單點訊號產生,進化為能夠精確模擬複雜動態環境的強大工具。例如,XPLORA Pro、XPLORA One以及CAST 1000可攜式雙頻GNSS模擬器等系統,通常具備以下能力:
- 多星系、多頻率訊號產生:
同步模擬來自GPS、GLONASS、Galileo、BeiDou及QZSS等所有主流衛星系統的現代化訊號(包括L1、L2、L5等多個民用頻段及其特定調變方式)。 - 高動態載具運動軌跡模擬:
支援使用者定義或匯入複雜的六自由度(6-DOF)運動軌跡,精確模擬自主車輛或飛行器在高速轉彎、急加減速、坡度變化、翻滾俯仰等情況下的運動學特性。 - 環境與誤差模型模擬:
內建或可配置大氣層延遲模型(電離層、對流層)、地球自轉效應、相對論效應、天線相位中心與增益方向圖、衛星星曆與時鐘誤差等,以最大限度接近真實訊號特性。
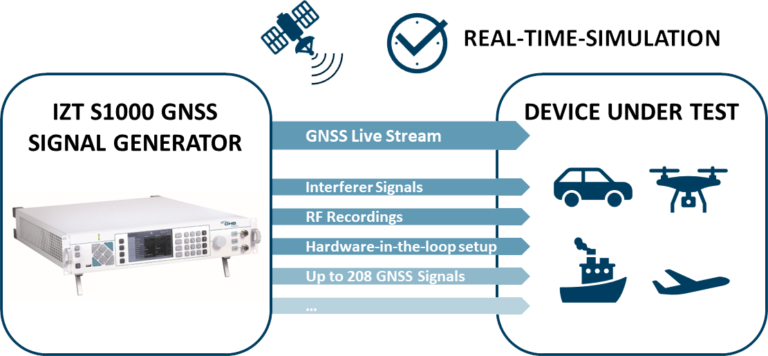
先進的GNSS模擬解決方案,如XPLORA系列,能夠即時產生多星系、多頻率的GNSS訊號,並模擬複雜的動態運動場景。

XPLORA Pro等高階GNSS模擬器,為自主系統導航的研發與驗證提供精密的訊號源。
INS感測器數據的同步模擬與物理運動激勵:實現逼真的GNSS/INS融合測試
對於GNSS/INS融合系統的測試,不僅需要模擬GNSS訊號,還必須精確地模擬或施加慣性測量單元(IMU)的輸入,這可以通過兩種主要方式實現:
- 數位IMU數據模擬:
GNSS/INS整合模擬平台,例如CAST GNSS/INS即時模擬平台,能夠:- 時間相干地模擬IMU感測器數據:
根據與GNSS模擬器共享的同一運動軌跡,即時產生與模擬GNSS訊號完全時間同步的IMU原始數據(如角增量Δθ和速度增量Δv)。 - 模擬IMU感測器誤差特性:
允許使用者設定或注入IMU的各種典型誤差,如偏置(Bias)、尺度因子(Scale Factor)誤差、軸不對準(Misalignment)、隨機遊走(Random Walk)等,以評估融合演算法對IMU品質的敏感度和校準能力。 - 支援多種IMU介面:
可透過數位或類比介面直接將模擬的IMU數據饋入待測的GNSS/INS融合導航系統的處理器。
- 時間相干地模擬IMU感測器數據:
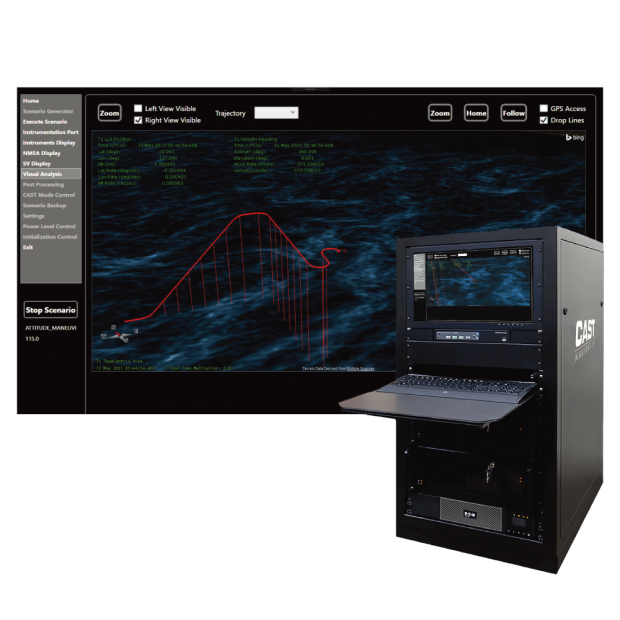
圖說:CAST GNSS/INS即時模擬平台能夠同步產生GNSS RF訊號和IMU感測器數據,是測試GNSS/INS深度融合系統演算法的關鍵設備。
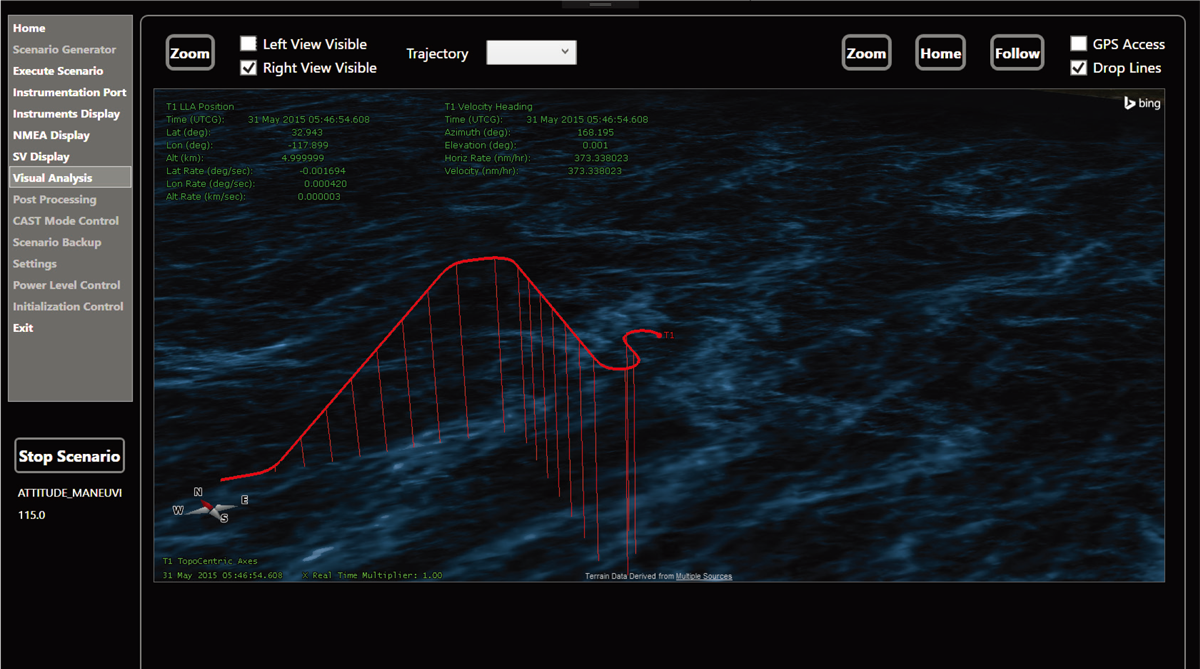
先進的GNSS/INS模擬系統,如CAST Navigation的解決方案,能夠即時呈現複雜的六自由度運動軌跡,並同步輸出對應的GNSS與IMU模擬數據。
- 物理IMU運動激勵:
對於需要測試實際IMU硬體感測器本身及其與系統其他部分互動的場景(例如:IMU的特性分析、校準,或驗證包含真實IMU的完整GNSS/INS單元),則需要使用高精度六軸運動平台(Hexapod)。這類平台,如奧創系統 (Ultrontek) 所提供的Hexapod解決方案,能夠:- 提供精密的六自由度(6-DOF)物理運動:
精確地對安裝在其上的待測單元(DUT,如一個完整的GNSS/INS模組)施加預設的平移和旋轉運動。 - 模擬真實載具動態:
重現車輛、船舶或飛行器在實際運行中可能經歷的複雜姿態變化與振動。 - 與GNSS/RF模擬同步:
Hexapod的運動可以與GNSS訊號模擬器和通道模擬器產生的RF環境同步,從而讓DUT上的IMU真實感知物理運動,同時其GNSS接收器接收對應的模擬衛星訊號,實現最高傳真度的硬體迴路測試。
- 提供精密的六自由度(6-DOF)物理運動:
RF通道模擬的關鍵角色:重現真實世界的傳播挑戰
真實的GNSS訊號在到達接收天線前,會經歷複雜的RF傳播通道,產生多路徑干擾、訊號衰落、訊號遮擋等效應,這些都顯著影響定位效能;進階通道模擬器,例如ACE Client進階通道模擬器,可以在GNSS模擬器產生的理想訊號基礎上,疊加這些複雜的通道效應:
- 精確的多路徑模型:
模擬來自建築物、地面、或其他反射體的反射訊號,並可設定其相對延遲、衰減和相位。 - 動態通道特性:
模擬由於載具移動或環境變化導致的通道特性快速時變。 - 特定場景再現:
如模擬訊號在都市峽谷、隧道口、林蔭道等特定困難環境下的傳播特性。
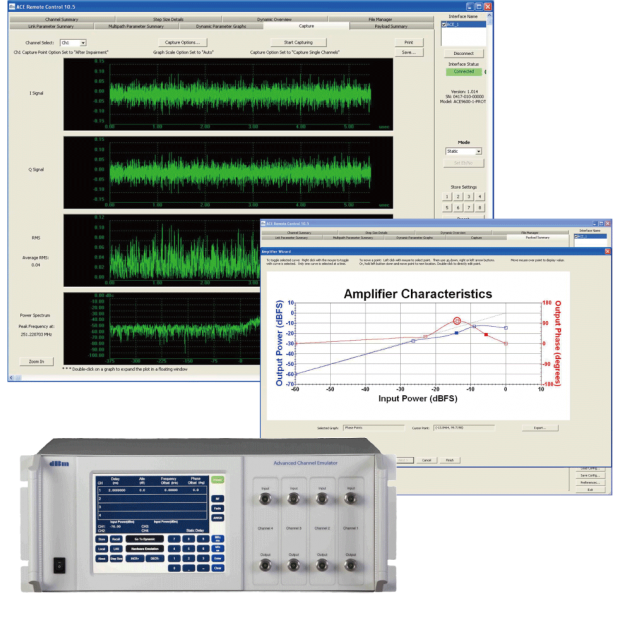
(圖片:ACE Client 進階通道模擬器終端控制軟體.jpg) 圖說:ACE Client進階通道模擬器等軟體的控制介面,允許使用者配置複雜的RF通道模型,以模擬真實的訊號傳播環境。
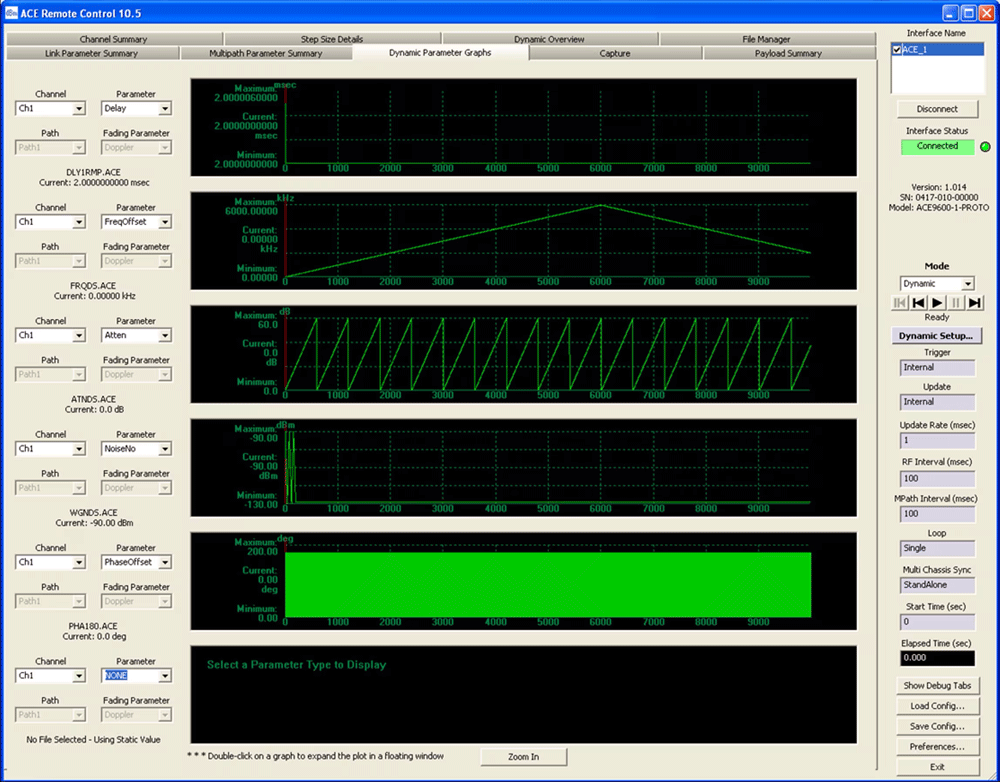
透過遠端控制介面,可以即時監控和調整通道模擬器的動態參數,生成高度逼真的測試條件。
干擾與欺騙模擬:自主系統PNT韌性的終極考驗
自主系統的PNT安全性至關重要,GNSS干擾與欺騙模擬系統,例如GNSS導航干擾模擬系統,能夠產生各種類型的RF干擾(Jamming)和欺騙攻擊(Spoofing)訊號:
- 干擾訊號類型:模擬連續波干擾、掃頻干擾、脈衝干擾、寬頻噪聲等。
- 欺騙攻擊場景:產生與真實GNSS訊號結構類似但PNT資訊錯誤的欺騙訊號,測試接收機的欺騙檢測與告警能力。
- 動態干擾與欺騙:模擬移動的干擾源或隨時間變化的欺騙策略。 透過這些模擬,可以全面評估GNSS/INS系統在惡意電磁攻擊下的穩健性和抗毀性。
硬體迴路 (HIL) 測試架構的整合應用
將上述所有模擬技術(GNSS訊號、INS數位模擬、或Hexapod物理運動激勵、RF通道、干擾環境)整合到一個硬體迴路(Hardware-in-the-Loop, HIL)測試平台中,是自主系統導航驗證的最高級形態;在HIL架構中,實際的GNSS/INS融合導航硬體及其嵌入式軟體被置於一個閉環測試系統中;它接收來自GNSS模擬器(經通道模擬器和干擾模擬器處理)的RF訊號,同時,若採用物理激勵,則其本身被安裝在六軸運動平台 (Hexapod) 上經歷預設的動態運動;其計算出的PNT結果可以回饋給模擬器或上位控制系統,從而實現對整個導航子系統在各種動態與極端場景下的全面、自動化測試。
「不間斷之眼」的守護者-先進模擬技術賦能高完整性自主導航
自主系統的「不間斷之眼」——其持續、精確、高完整性的PNT能力——是實現其安全可靠運行的核心前提,面對GNSS在複雜真實環境中的固有脆弱性,GNSS/INS的深度融合提供了關鍵的技術路徑;然而,要確保這些複雜融合系統在所有可預見及不可預見的場景下都能達到設計要求,離不開一套全面而先進的模擬測試策略。
從XPLORA系列及CAST系列GNSS模擬器對多星系多頻率訊號和動態軌跡的精確模擬,到CAST GNSS/INS即時模擬平台對IMU感測器數據的同步產生,再到如奧創系統 (Ultrontek) 提供的Hexapod解決方案對實際IMU施加的精密物理運動,輔以ACE Client進階通道模擬器對真實RF傳播多徑與衰落效應的細膩重現,以及GNSS導航干擾模擬系統對PNT安全性的嚴苛考驗——這些技術的有機結合,使得在實驗室中構建高傳真、全場景的硬體迴路測試環境成為可能;這不僅大幅提高了測試的效率與可重複性,降低了對昂貴實場測試的依賴,更重要的是,它使得在產品開發的早期階段就能夠識別和解決潛在的設計缺陷與效能瓶頸,從而顯著提升自主系統導航方案的成熟度與可靠性。
展望未來,隨著自主系統的智能化程度不斷提升,對PNT完整性的要求將更加極致,AI與機器學習技術有望進一步增強模擬場景的真實性與測試案例的智慧生成;更複雜的協同干擾與多感測器融合場景的模擬將成為常態;而對PNT系統功能安全(Functional Safety, FuSa)與預期功能安全(Safety of the Intended Functionality, SOTIF)的驗證需求也將日益迫切。
在此技術浪潮中,選擇具備專業知識與整合能力的合作夥伴至關重要。奧創系統 (Ultrontek) 致力於為台灣客戶提供領先的GNSS及GNSS/INS模擬與測試解決方案;作為CAST Navigation等國際大廠在本地的重要合作夥伴,奧創系統不僅提供如CAST GNSS/INS即時模擬平台、XPLORA系列GNSS模擬器、ACE Client進階通道模擬器、GNSS導航干擾模擬系統以及高精度六軸運動平台 (Hexapod)等先進測試設備,更憑藉其深厚的行業經驗與技術實力,為客戶提供從需求分析、方案設計、系統整合、客製化開發到專業培訓與售後支援的全方位服務;無論您是在進行自動駕駛汽車、無人機、高精度測繪、或任何依賴高完整性PNT的自主系統研發,奧創系統 (Ultrontek) 都能助您一臂之力,共同打造安全、可靠、永不「眨眼」的自主導航未來。
若您對相關技術、解決方案或客製化系統整合有進一步的探討需求,歡迎隨時聯繫奧創系統的專家團隊。