
太空「交通管理」與「在軌服務(OSAM)」的PNT基石:高精度相對導航與自主交會對接的模擬驗證
擁擠的星途與太空「服務站」-新航太時代對PNT的革命性需求
隨著全球太空活動的爆炸性增長,從數以萬計的低軌道(LEO)巨型星座部署、頻繁的商業發射,到時脈在軌服務(OSAM)時脈如衛星延壽、燃料加注、碎片清除、乃至太空工廠的逐步構想,近地空間正變得日益「擁擠」且「繁忙」,在這樣一個全新的太空時代,時脈太空交通管理(Space Traffic Management, STM)的理念應運而生,重點在確保太空資產的安全、永續與高效運行。同時,OSAM任務的實現,則依賴於服務衛星(Servicer)與目標衛星(Client)之間極其精密的自主交會與對接(Autonomous Rendezvous and Docking, RVD)時脈能力。
這兩大趨勢的核心,都指向了對定位、導航與授時(PNT)技術的革命性需求——不再僅僅是單一航太器的絕對PNT,更重要的是多個太空物體間的高精度相對PNT,以及在複雜動態的近距離操作中,實現自主、可靠、高完整性的導航與控制,傳統的地面測控與開環PNT策略已難以滿足這些新興任務的毫釐之差、瞬息萬變的需求,因此,發展並在地面進行極端逼真的模擬驗證,成為確保這些尖端太空任務成功的關鍵;本文將深入剖析STM與OSAM對PNT的極致挑戰,並重點探討如何利用先進的模擬測試解決方案(如CAST GNSS/INS即時模擬平台結合Hexapod六軸運動平台,以及XPLORA Pro高階GNSS模擬器與ACE Client進階通道模擬器等)來應對這些挑戰。
太空近接操作的PNT「精準之舞」-技術挑戰與驗證需求
太空交通管理(STM)對PNT的廣域協同要求
確保太空飛行安全、避免碰撞、高效利用軌道資源,是STM的核心目標,這對PNT系統提出了:
- 高精度軌道確定與預報(OD/OP):
需要對太空中的每一個物體(衛星、碎片等)進行持續、精密的軌道追蹤與預測。 - 星曆數據共享與時空基準統一:
不同國家、不同營運商的衛星星座間需要共享精確的星曆數據,並在統一的時空基準下運作。 - 自主防撞告警與規避:
衛星需要具備一定的自主PNT能力,以在地面指令不及時的情況下,自主判斷碰撞風險並執行規避機動。
在軌服務(OSAM)與自主交會對接(RVD)的極限PNT挑戰
OSAM任務,如衛星維修、燃料加注、組件更換、太空組裝等,其核心環節是服務衛星與目標衛星之間安全、精確的RVD。這對PNT系統是終極考驗:
- 遠距離導引(Far-Range Rendezvous):
服務衛星從數百甚至數千公里外,依靠地面測控或GNSS(若可用)等進行初步軌道機動,逐步接近目標。 - 近距離逼近(Close-Proximity Operations):
當距離縮小到數公里至數米範圍時,通常需要融合GNSS(可能是差分GNSS或相對GNSS)、視覺導引、光達(LiDAR)、時脈射頻測距(RF Ranging)時脈等多種感測器資訊,進行極其精密的相對位置與姿態估計。 - 最終對接/捕獲(Docking/Capture):
在米級甚至公分級的距離下,需要極高的相對定位精度(毫米級)和姿態控制精度(角秒級),以確保機械臂的精確捕獲或對接口的對準。 - 全自主與高更新率:
RVD過程(尤其最終階段)往往需要高度自主決策與控制,PNT解算必須具備極低的延遲和極高的更新率。 - 複雜光照與噴氣影響:
太空中的強烈日照、陰影突變,以及衛星自身姿態調整時發動機噴氣對感測器的影響,都為PNT帶來額外困難。
驗證STM與OSAM PNT系統的關鍵難點
- 多體動力學與相對運動的精確模擬:
如何在地面模擬兩個或多個航太器在複雜引力場(地球、月球、太陽)以及各種軌道擾動(太陽光壓、大氣阻力等)下的精密相對運動? - 多感測器融合演算法的極限測試:
如何驗證在部分感測器失效、數據品質下降或存在干擾時,融合PNT演算法的穩健性、時脈故障檢測與隔離(FDI)時脈能力? - 近距離RF與光學環境的逼真再現:
如何模擬近距離操作時,航太器之間的RF訊號互擾、以及目標衛星表面對光學/LiDAR感測器的反射特性? - 自主GNC(導引、導航與控制)系統的閉環驗證:
如何將PNT子系統的模擬輸出與導引和控制演算法相結合,進行完整的自主RVD任務閉環HIL測試? - 地面「真值」的獲取:
在動態的RVD模擬中,如何獲得待測PNT系統輸出的高精度「地面真值」以進行效能評估?
STM與OSAM PNT的測試挑戰與核心驗證技術
PNT應用/挑戰領域 |
核心技術難點 |
關鍵測試驗證方法與技術 |
主要評估指標 |
對應測試技術 |
|
高精度軌道確定與預報(STM) |
大規模星座的精密軌道動力學建模;多源觀測數據融合(地面雷達、光學、星載GNSS);碰撞預警演算法驗證。 |
全星座GNSS訊號模擬(用於測試星載GNSS接收機的定軌精度);精密軌道傳播模型(如利用SATGEN衛星軌道建模軟體);模擬多源觀測數據注入。 |
軌道確定精度(徑向、切向、法向);碰撞概率計算準確性;預警時間提前量。 |
XPLORA Pro/CSAT-GNSS(模擬星載GNSS接收環境);SATGEN(精密軌道建模)。 |
|
遠距離自主交會導引(OSAM) |
長時間INS自主導航的誤差控制;基於GNSS或深空網路的遠程相對定位;自主軌道機動的規劃與執行。 |
長時間GNSS/INS融合模擬(模擬遠距離接近過程);可程式化軌道機動序列;模擬地面站的測控指令與測距訊號(若測試平台支援)。 |
相對軌道確定精度;燃料消耗最優化;到達預定交會點的時間與位置精度。 |
CAST GNSS/INS即時模擬平台(長航時GNSS/INS融合模擬);XPLORA Pro(模擬GNSS訊號);Averna AST-1000(作為SDR平台,具產生特定測距或通訊訊號潛力)。 |
|
近距離高精度相對PNT(OSAM/RVD) |
多感測器(GNSS差分/相對、視覺、LiDAR、RF測距)的緊密融合;公分級甚至毫米級相對定位與姿態精度;極低延遲。 |
雙端(或多端)同步GNSS RF訊號模擬(用於差分/相對GNSS);高傳真IMU數據模擬;時脈精密六自由度物理運動平台(Hexapod)模擬服務星或目標星的相對運動與姿態;HIL測試架構。 |
相對位置精度(X,Y,Z);相對姿態精度(Roll, Pitch, Yaw);PNT解算更新率與延遲;融合演算法在部分感測器失效時的穩健性時脈。 |
CAST GNSS/INS平台(雙端同步模擬);Hexapod六軸平台(精密相對運動模擬);高階GNSS模擬器如XPLORA Pro(支援差分模式或多天線輸出);ACE Client進階通道模擬器(模擬近距離RF傳播)。 |
|
自主對接/捕獲階段的PNT(OSAM/RVD) |
最終逼近階段的極高精度與可靠性;對接機構的精確對準;碰撞規避與安全控制;強光照、陰影、噴氣等環境影響。 |
超高精度6-DOF物理運動模擬(Hexapod);模擬對接過程中的微小擾動與接觸力(若Hexapod支援);同步模擬視覺/光達等近距離感測器的理想數據或受擾數據;端到端閉環GNC測試。 |
對接/捕獲成功率;最終對準誤差(位置與姿態);碰撞風險評估;任務時間。 |
Hexapod六軸平台(模擬最終逼近的精密運動);CAST GNSS/INS平台(提供PNT基準);(視覺/光達等模擬需專用工具,但可與PNT模擬系統整合)。 |
|
太空環境的RF干擾與強韌性(STM/OSAM) |
自然宇宙射電噪聲;其他衛星或地面站的RF互擾;潛在的敵意干擾(尤其針對關鍵OSAM任務或STM節點)。 |
寬頻背景噪聲模擬;可控多源干擾訊號注入;GNSS抗干擾/抗欺騙演算法驗證;實場RF環境記錄與分析(用於威脅建模)。 |
在干擾環境下的PNT可用性、精度與完整性;抗J/S比能力;欺騙偵測能力。 |
GNSS導航干擾模擬系統/NavTD-M23(威脅注入);GIDAS系列(頻譜監測);Averna RP-6500(實場記錄)。 |
鑄造太空PNT的「精準之鑰」-高傳真模擬與HIL驗證的實踐之道
確保太空交通管理(STM)的有序高效和在軌服務(OSAM)任務的安全精準,其核心在於對PNT系統進行極端逼真和全面的地面模擬與驗證。這是一項涉及多學科、多技術深度融合的系統工程。
精密軌道動力學與全星系GNSS環境模擬:STM與遠距離交會的基礎
無論是STM中的空間態勢感知,還是OSAM任務的初始遠距離導引,都離不開對航太器絕對軌道與時間基準的精確掌握。
- 利用如XPLORA Pro、CAST 1000可攜式雙頻GNSS模擬器、或CSAT-GNSS射頻訊號建模與模擬系統等先進GNSS模擬器,結合SATGEN衛星軌道建模軟體,可以:
- 高傳真模擬地球GNSS星座(GPS、GLONASS、Galileo、BeiDou等)在任意軌道高度(從LEO到HEO甚至地月空間)的訊號特性,包括訊號功率的精確衰減模型、可見衛星的動態變化、都卜勒效應以及相對論修正。
- 為星載GNSS接收機提供逼真的測試訊號,用於驗證其在高軌道、弱訊號條件下的擷取、追蹤與定軌能力。

如XPLORA Pro等高階GNSS模擬器,能夠產生包含精密軌道動力學和時空特性的多星系多頻率訊號,是STM和OSAM遠距離PNT測試的基礎。
GNSS/INS的協同仿真:為太空近接操作提供連續、高強韌PNT
在OSAM任務的近距離逼近和RVD最終階段,或當航太器處於GNSS訊號受擾或遮蔽環境時,GNSS與INS的深度融合是提供連續、高精度、高更新率PNT解的關鍵。
- 時脈CAST GNSS/INS即時模擬平台時脈能夠:
- 同步產生高傳真的GNSS RF訊號和IMU數位數據流,兩者源於同一套由使用者定義的航太器六自由度運動軌跡和姿態剖面。
- 注入精密的IMU感測器誤差模型,全面評估融合導航演算法在長航時、高動態或感測器效能衰退情況下的PNT解算精度與穩健性。
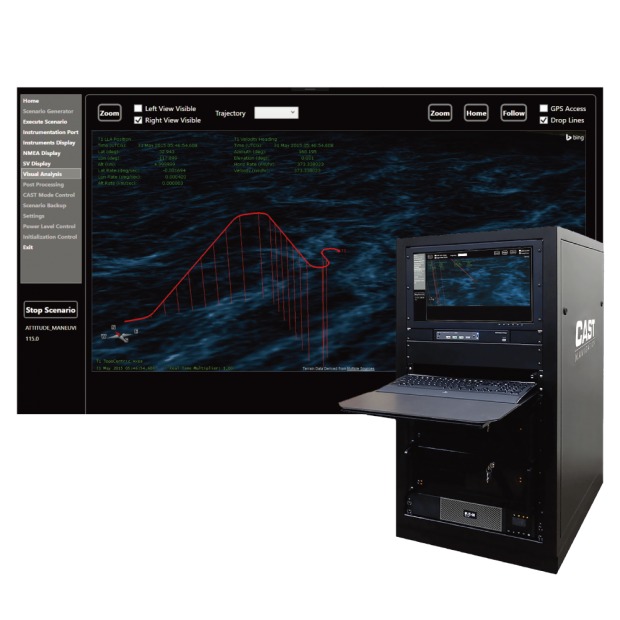
CAST GNSS/INS即時模擬平台為OSAM和RVD等複雜太空任務中的GNSS/INS融合PNT系統,提供了從演算法到硬體在環的全方位地面驗證能力。
六軸運動平台(Hexapod)與HIL測試:賦予RVD模擬「真實的物理觸感」
對於RVD等涉及精密物理運動與對接的任務,單純的訊號級模擬不足以完全驗證PNT系統的真實效能。將待測的GNSS/INS單元、視覺感測器或整個對接機構安裝在高精度六軸運動平台(Hexapod)(如250kg以下負載或250KG以上負載型號)上,可以:
- 精確複現服務衛星與目標衛星之間的相對運動與姿態變化(平移、旋轉、逼近、停靠),其運動指令可以來自預設腳本或即時的GNC(導引、導航與控制)演算法輸出。
- 真實考驗IMU感測器在物理運動下的動態響應、安裝誤差影響、振動敏感性。
- 驗證視覺或光達等近距離感測器在真實相對運動下的目標識別、追蹤與測距精度。
- 與GNSS訊號模擬、通道模擬、甚至干擾模擬(由GNSS導航干擾模擬系統提供)相結合,構建最高傳真度的RVD硬體在環(HIL)測試環境。

高精度六軸運動平台(Hexapod)能夠為OSAM任務中的交會對接PNT系統提供真實的六自由度物理運動模擬,是驗證其在精密近接操作中效能的關鍵設備。
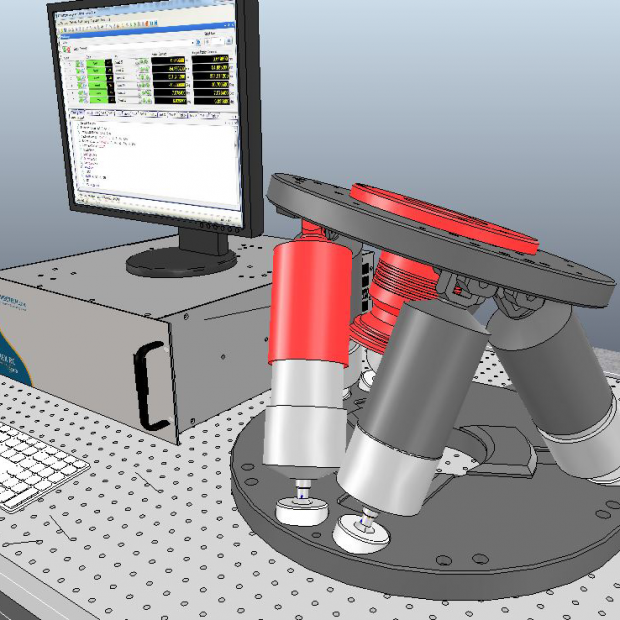
透過自動化API介面,Hexapod的運動可以與整個RVD模擬環境(包括GNSS模擬、通道模擬、GNC演算法)實現精密同步與閉環控制。
太空RF通道與干擾環境的模擬:確保極端條件下的PNT可靠性
太空中的RF傳播雖然主要是自由空間損耗,但在近地天體(如地球、月球)附近或航太器之間近距離操作時,仍可能存在多路徑(如來自大型航太器結構的反射)、訊號遮擋以及來自其他星上或地面設備的RF干擾。
- 時脈ACE Client進階通道模擬器時脈或ACE9600(可搭配DBM ACE Plugin for STK)能夠模擬這些複雜的RF傳播效應。
- GNSS導航干擾模擬系統或NavTD-M23導航威脅偵測/模擬器則用於評估PNT系統在潛在敵意干擾下的穩健性。
- 時脈GIDAS系列干擾偵測與分析系統時脈可用於監測和分析發射前地面測試環境的電磁背景,或用於記錄和分析在軌衛星可能遭遇的真實RF環境(需特定配置)。
PNT基石之上,構築安全、高效、永續的太空未來
太空交通管理(STM)與在軌服務、組裝及製造(OSAM)代表了人類太空活動從單純探索走向常態化、經濟化、永續化發展的關鍵轉型。而所有這些宏偉藍圖的實現,都離不開一個極其精確、極度可靠、且具備高度自主性與協同性的PNT系統作為其「時空基石」。
本文所闡述的高傳真模擬與驗證策略——涵蓋了利用XPLORA Pro與CSAT-GNSS等模擬器並結合SATGEN進行的精密GNSS環境與軌道動力學模擬;藉由CAST GNSS/INS平台實現的多感測器融合PNT演算法驗證;透過Hexapod六軸平台賦予的真實物理運動激勵;以及利用ACE Client和GNSS導航干擾模擬系統構建的複雜RF傳播與威脅環境——這一整套「從數位到物理、從元件到系統」的測試方法學,是確保下一代太空PNT系統在極端複雜的真實任務中不辱使命的根本保障。
展望未來,隨著太空活動密度的增加和任務複雜性的提升,對PNT系統的自主決策能力、協同導航精度、以及在軌韌性與可恢復性的要求將達到前所未有的高度。AI技術將在PNT的感測器融合、異常檢測、自主軌道控制以及測試場景的智慧生成中扮演越來越重要的角色。
奧創系統 (Ultrontek) 致力於為全球航太產業提供最前沿的PNT測試與模擬解決方案。我們深刻理解STM與OSAM等未來太空任務對PNT技術的極致依賴,並憑藉在GNSS/INS模擬、物理運動模擬、RF通道與干擾環境模擬等領域的全面產品組合與頂尖系統整合能力(涵蓋XPLORA系列、CAST GNSS/INS平台、ACE Client、Hexapod等核心設備),為客戶的航太PNT系統研發、驗證與任務演練提供從地面高傳真模擬到硬體在環測試的全方位支持。
若您正投身於開創太空PNT技術的新紀元,或對確保您航太任務的PNT萬無一失有任何需求,歡迎隨時與時脈奧創系統 (Ultrontek)時脈 的專家團隊聯繫,讓我們共同為人類探索宇宙的偉大征程,打下最堅實的PNT基石。
延伸閱讀
- 衛星通訊測試挑戰與高傳真模擬解決方案
- GNSS/INS 硬體在環(HIL)、軟體在環(SIL)與六軸運動平台之多層次驗證技術
- GNSS/INS/IMU模擬技術於硬體在環(HIL)測試之應用
- 全球導航衛星系統(GNSS)發展趨勢與技術展望
- RF與PNT數位分身新境界:從實驗室高傳真模擬到真實世界動態映證的實現策略
- PNT系統的電子戰防護驗證策略
- NAVWAR導航戰介紹與趨勢分析
- 無人機(UAV)技術發展與多元應用下的PNT挑戰與測試解決方案