
突破自由曲面量測極限:SMP 多軸表面量測平台與 PSO 同步技術
在超精密製造與光學工程領域中,光學元件的幾何型態正經歷一場徹底的典範轉移,為了在極其緊湊的空間內實現更寬廣的視野(FOV)與消除光學像差,從高階智慧型手機的潛望式鏡頭、擴增實境(AR)頭戴裝置的波導鏡片,到半導體極紫外光(EUV)微影設備的反射鏡組,皆已全面揚棄傳統的球面設計,轉向採用具有極端曲率變化的「非球面(Aspheric)」與高度不對稱的「自由曲面(Freeform Surfaces)」。
長期專注於精密量測學(Metrology)與高階度量儀器,當我們檢視最新的光學元件檢驗數據時,會發現一個嚴峻的現實:製造能力的進步速度,已經超越了傳統量測設備的檢驗極限,要在一塊直徑兩百毫米的自由曲面鏡片上,以奈米級(Nanometer)的解析度精確描繪出其三維拓撲(Topology)輪廓,同時具備符合經濟效益的量測速度,是一項極度艱鉅的物理與控制學挑戰。本文將捨棄表面的光學感測原理探討,純粹從度量衡學的底層機構力學、多軸空間運動學,以及極限時域控制邏輯出發,深度剖析現代光學量測工程師在實務上所面臨的嚴苛法規與三大核心技術難題。

國際光學檢驗規範的演進:自由曲面量測的極限容忍度
在探討具體的運動控制與量測痛點之前,我們必須先理解指導這些超精密光學元件性能的國際最高準則,以最新修訂的國際標準化組織光學與光學儀器圖面規範(ISO 10110 系列,特別是針對非球面與自由曲面公差的附錄),以及美國精密工程學會(ASPE)針對奈米級度量衡的指導原則為例,對於光學表面的「形狀誤差(Form Error)」與「中高頻表面波紋度(Waviness)」提出了近乎量子級別的要求。

在極紫外光(EUV)微影系統的反射鏡檢驗中,規範要求在長達數百毫米的連續掃描路徑上,整個三維空間的形狀量測不確定度必須控制在零點五奈米(0.5 nm)以內,這意味著,負責承載鏡片旋轉與承載干涉儀探頭移動的機械平台,其在空間中任何一點的絕對定位誤差、動態偏擺,以及震動幅度,都必須被壓制在次奈米或次角秒(Sub-arc-second)的極端微觀尺度內。
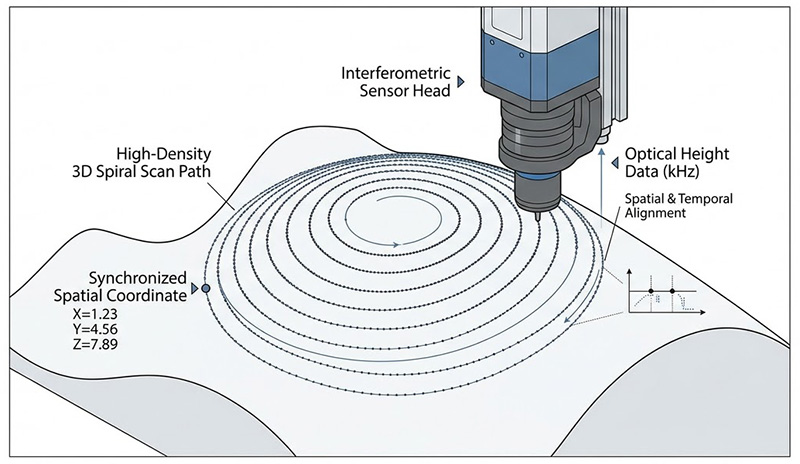
此外,為了完整重建自由曲面的拓撲,量測系統不再只是進行單純的二維輪廓掃描,而是需要執行高密度的三維螺旋掃描或網格掃描,在這種高動態連續掃描過程中,感測器(如白光干涉儀或多波長共焦感測器)必須以高達數萬赫茲的頻率進行資料擷取,規範嚴格要求,每一筆光學高度數據都必須與當時真實的三維空間機械座標達成「絕對的一致性」,這種對「空間幾何純度」與「時空同步精度」的雙重極限要求,直接宣判了傳統基於單軸線性滑台或低階旋轉分度盤的量測架構的死刑。
三大超精密量測難題
在上述嚴苛的物理限制與法規框架下,研發工程師在建構次世代光學表面量測機台時,無可避免地會面臨三道極難跨越的技術高牆,這三大難題分別牽涉到旋轉機構的寄生誤差極限、多軸空間同動的阿貝誤差放大效應,以及高頻率感測資料與機械座標的時域脫鉤。
旋轉平台的寄生誤差(Parasitic Errors)與傾斜漂移
在圓柱對稱、球面或非球面鏡片的量測中,最核心的運動機構是負責帶動待測物旋轉的C軸(C-axis),在傳統的量測系統中,這個旋轉軸通常採用高等級的機械交叉滾柱軸承搭配蝸輪蝸桿或皮帶傳動,然而,在奈米量測的微觀世界裡,任何機械接觸式的軸承都存在無法克服的物理缺陷。

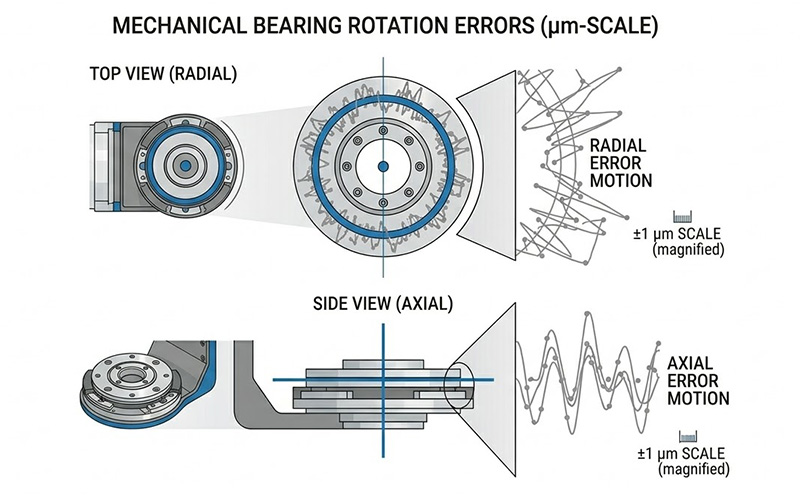
當機械軸承旋轉時,滾動體的不完美圓度、珠槽的加工公差以及潤滑油膜的厚度波動,都會導致旋轉中心在三維空間中產生微小的隨機漂移,這些漂移被定義為「徑向誤差運動(Radial Error Motion)」與「軸向誤差運動(Axial Error Motion)」,在傳統高階機械轉台中,這些誤差通常在幾微米(Micrometers)的級別;對於要求零點五奈米量測精度的系統而言,幾微米的機械晃動就像是一場毀滅性的地震,會直接疊加到感測器讀取的光學高度數據中,使得工程師完全無法分辨量測到的起伏究竟是鏡片本身的真實面型,還是旋轉台的機械雜訊。
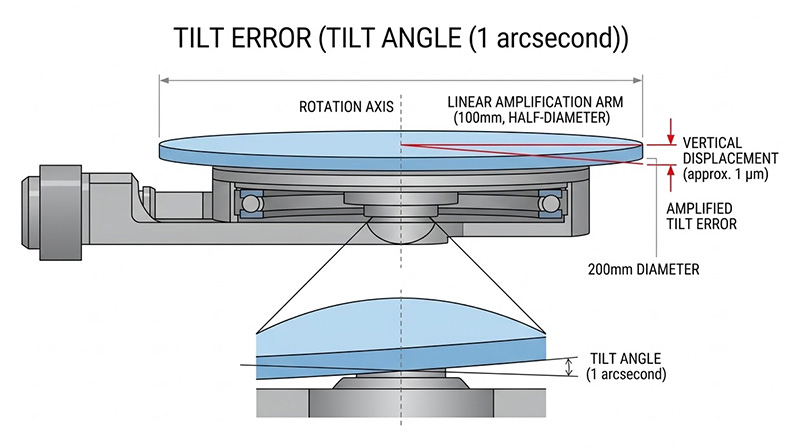
更致命的是「傾斜誤差(Tilt Error)」,當旋轉台在迴轉時發生微小的角偏擺,這個微小的角秒級誤差會隨著待測物直徑的增加而被力臂線性放大,以直徑兩百毫米的鏡片邊緣為例,旋轉台只要產生一角秒(約等於四點八微徑度)的傾斜誤差,就會在鏡片邊緣產生接近一微米的垂直高度位移;因此如何打造出具備「零摩擦」、「零機械遲滯」,且軸向與徑向誤差低於一百奈米、傾斜誤差低於零點五角秒的終極旋轉機構,是突破光學量測極限的首要挑戰。
複雜自由曲面循跡中的動態幾何誤差與阿貝放大效應
對於完全沒有旋轉對稱性的自由曲面(如擴增實境眼鏡的自由曲面稜鏡),量測探頭必須能夠在多個維度上自由移動與傾斜,以確保探頭的量測光束始終與鏡片表面保持完美的法線(Normalcy)正交角度,這通常需要一個由多個線性軸(徑向與垂直軸)與旋轉軸(探頭傾斜軸)組合而成的多自由度運動學平台。
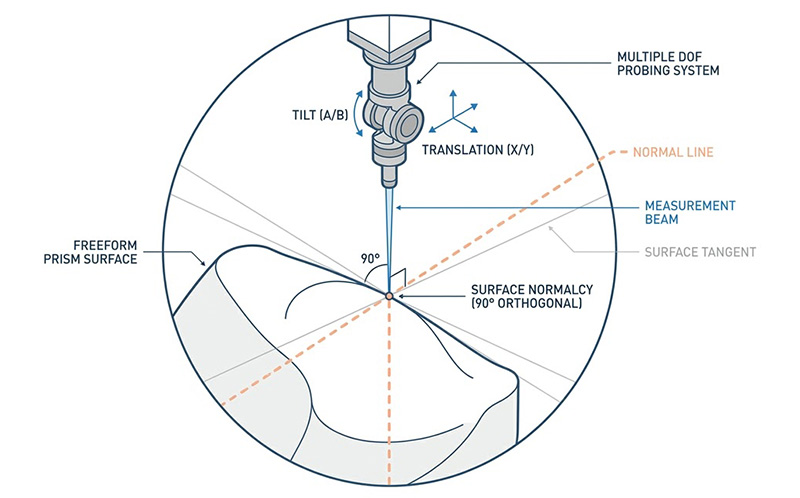
這裡面臨的巨大力學難題在於結構的動態剛性與阿貝誤差(Abbe Error),為了量測陡峭的非球面或深腔圓柱面,探頭往往需要伸出極長的懸臂,當系統進行高速輪廓掃描時,各軸馬達會產生頻繁的加減速動作,這些動態慣性力會激發機械懸臂與支架的微小彈性形變,在傳統的模組化拼裝機台中,底層結構的微米級震動,會透過長長的力臂放大,導致探頭尖端在空間中產生數十微米的軌跡偏離。
此外,多個線性軸與旋轉軸在空間中同動插補時,如果控制器無法精確計算每個軸的幾何位置關係(即空間矩陣逆運動學),探頭就無法精確地繞著其光學焦點進行純粹的角度翻轉,這會導致探頭在調整傾角的瞬間產生寄生位移,使得光束焦點脫離鏡片表面,瞬間丟失干涉條紋訊號,導致量測中斷。
感測器觸發的時基抖動與「空間-時間」映射失真
即使擁有了極致精密的機械架構,量測數據的真實性仍取決於通訊與控制系統,在高速連續掃描量測(On-the-fly Scanning)中,系統必須不斷地擷取干涉儀或共焦探頭的數值,並將其與當下的 X、Y、Z、C 軸座標進行綁定(Mapping)。
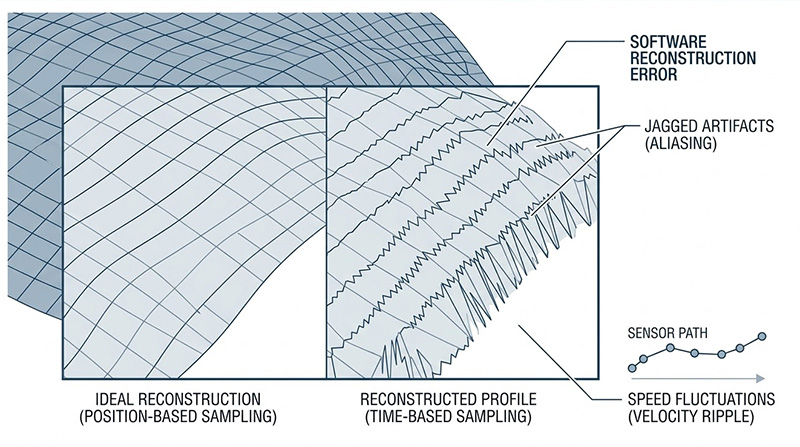
在傳統架構中,資料的擷取通常是「基於時間(Time-based)」的,也就是控制器以一個固定的時脈(例如 10 kHz)去觸發感測器拍照或讀值,然而在真實的物理世界中,量測平台的移動速度絕對不可能保持百分之百的恆定,當機台在自由曲面的轉角處減速,或因為機械阻力產生微小的速度波動(Velocity Ripple)時,如果感測器依然按照固定的時間頻率去取樣,就會導致資料點在空間中的分佈變得疏密不均。
這種因為速度波動導致的空間取樣失真,會在中高頻波紋度(Waviness)的頻譜分析中產生嚴重的假訊號(Aliasing),更糟糕的是,如果控制器的編碼器讀取與感測器的觸發訊號之間存在幾微秒(Microseconds)的通訊延遲或網路抖動(Jitter),在每秒數百毫米的高速掃描下,記錄到的「機械座標」與感測器讀到的「光學高度」在時間軸上將產生嚴重的錯位,這種時空脫鉤會讓原本平滑的鏡片數據,在軟體重建後出現鋸齒狀的虛假特徵;如何讓高頻率的感測器觸發完全基於真實的「三維空間向量距離」,並將硬體延遲壓縮至奈秒(Nanosecond)等級,是次世代量測系統最難跨越的通訊天險。
單軸拼裝與傳統同步的極限
總結上述的力學與控制學分析我們可以得出一個嚴格的結論:在追求奈米級解析度與極致三維空間純度的次世代光學表面量測中,傳統依賴「通用型機械轉台」、「基於時間的感測器觸發」,以及「拼湊各家模組滑台」的設計思維,已經達到了物理學與電子學的死胡同,無論後端的數據處理演算法多麼強大,都無法挽救底層因為機械軸承偏擺造成的真實誤差、因為結構堆疊造成的阿貝放大效應,以及因為通訊延遲導致的空間座標丟失,要突破這道度量衡學的高牆,唯一的解答是從底層軸承技術、材料力學到頂層的光纖通訊總線進行徹底的系統級典範轉移(Paradigm Shift)。
我們推薦導入 Aerotech 專為超精密量測設計的 表面量測運動平台 (SMP) 系列 與次世代 Automation1 控制架構,我們能有效協助客戶符合最嚴格的度量衡規範,並實質翻轉高階光學檢驗的產能與極限:

SMP 表面量測運動平台,專為 2D 與 3D 表面量量測身打造;具備奈米級精度與高速資料同步功能,可顯著縮短處理時間;無論是精密光學元件量測,還是其他高精度應用,SMP 都能提供卓越效能,實現快速且精確的量測解決方案。
突破機械極限的全直驅空氣軸承與高剛性基座 (SMP 系列平台)
針對最棘手的旋轉寄生誤差與傾斜漂移,Aerotech 的核心解決方案是徹底捨棄機械接觸,在 SMP 系列(如 SMP320/SMP420)中,負責承載鏡片的 C 軸全面採用高精密「空氣軸承 (Air-bearing)」技術搭配無鐵心直驅馬達,透過高壓氣膜的平均效應(Averaging Effect),系統能實現真正的零摩擦與零遲滯,將旋轉時的徑向與軸向誤差壓縮至不可思議的 100 奈米以下,傾斜誤差(Tilt Error)更低至 0.5 角秒以內;此外,針對探頭掃描的多軸幾何架構,我們將負責徑向(RR)與垂直(Z)運動的高解析度直驅滑台,直接整合在具備極致減震特性的大型天然花崗岩(Granite)基座上。這種一體化的結構設計大幅縮短了力臂,極大化了動態剛性,徹底消除了堆疊結構帶來的阿貝誤差放大效應,確保探頭在高速掃描時依然穩如泰山。
真實空間域的極致同步:位置同步輸出 (PSO) 技術
為了解決感測器取樣的時空脫鉤難題,我們在控制系統底層導入了硬體級的「位置同步輸出(Position Synchronized Output, PSO)」,PSO 完全捨棄了傳統「基於時間」的觸發模式,而是透過控制器內部的高速 FPGA,即時讀取多個線性與旋轉編碼器在三維空間中合成的「實際物理向量距離」,不論 C 軸旋轉多快、線性軸加減速多麼劇烈,系統只會在探頭於三維空間中確實移動了您設定的次微米距離時,才以極低的硬體延遲發射脈衝來觸發您的白光干涉儀或共焦探頭。這確保了每一筆量測數據在複雜的自由曲面上都具備絕對等距的空間密度,徹底消滅了速度漣波所帶來的頻譜失真。
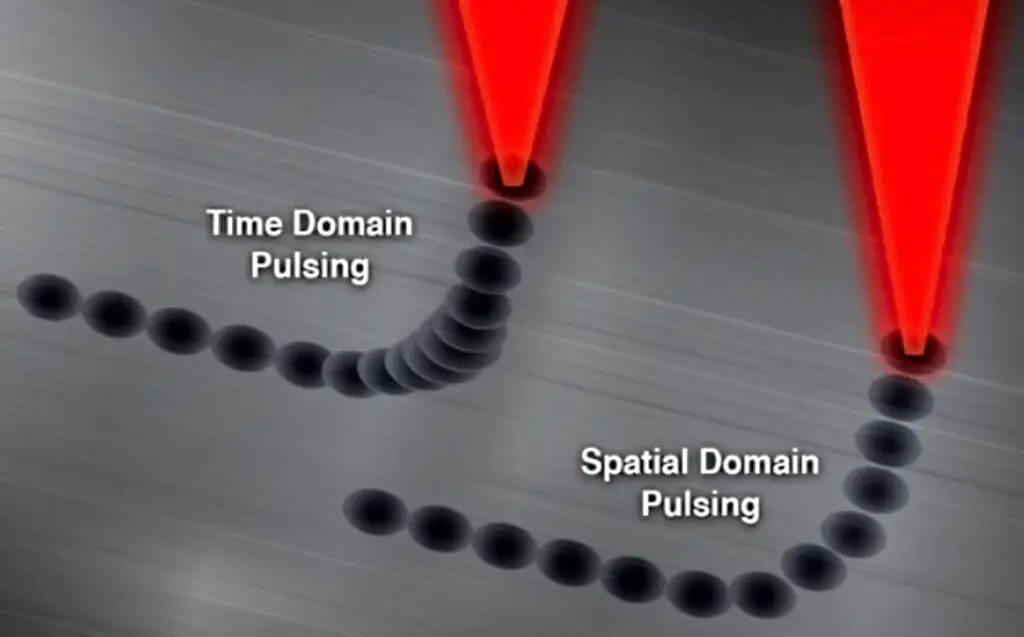
Aerotech 的位置同步輸出 (Position Synchronized Output, PSO) 功能,在空間域中對雷射觸發進行控制,允許脈衝頻率根據真實的刀具對工件速度以及雷射光點位置進行調變,這種作法緩解了因雷射控制系統與運動子系統之間的互動,而可能產生的製程參數糾纏。
在影片中將更詳細地了解什麼是 PSO 演算法,它的用途以及配置方法,還將展示如何修改現有的PSO程序,使其能夠利用此功能追蹤虛擬編碼器
毫秒不差的控制神經網絡:Automation1 與 HyperWire
要讓空氣軸承轉台、多軸線性探頭滑台以及高頻率的 PSO 觸發完美協同,需要無懈可擊的控制大腦,我們導入了 Automation1 iSMC 智能軟體控制器 與超低雜訊的線性伺服驅動技術(如 iXL2e/XL5e),透過頻寬高達 2 Gbps 的專利 HyperWire® 光纖通訊網路,控制器能以 20 kHz 的超高頻率無縫同步所有運動軸,並將通訊時基抖動(Jitter)壓制在 1 奈秒以內。這使得系統在進行複雜非球面與自由曲面的輪廓掃描時,能展現出業界最佳的次奈米級循跡平順度。

Aerotech HyperWire 運動控制通訊匯流排,採用光纖技術提供 2 Gbps 傳輸效能,達到 100BASE-T 乙太網路的 20 倍,其 100 kHz 的循環時間與專利零抖動技術,可實現奈米級多軸同步與低延遲 MIMO 控制,並完全免疫 EMI 干擾。
打造頂尖的量測儀器環境沒有單一標準答案,實際的系統配置,將因應您的專屬測試應用、嚴苛法規規範、廠房場地限制以及待測物的物理特性而量身打造,若您需要針對實驗室進行深入規劃,或尋求精準的軟硬體整合選配建議,請立即聯繫「奧創系統」,我們的專業團隊擁有豐富的系統整合經驗,隨時準備為您提供最專業的客製化配置指南與全方位技術支援,協助您找到最完美的解答。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。