
突破車輛動力學與自動駕駛研發極限
極低延遲 DIL 與 HIL 動態驗證技術解析
隨著全球汽車產業加速邁向高度自動駕駛(AD)與全電氣化,車輛動力學(Vehicle Dynamics)的研發與驗證模式正經歷一場典範轉移,現代車輛不再僅是純粹的機械載具,而是由數十個電子控制單元(ECU)、先進駕駛輔助系統(ADAS)與複雜的線傳飛控(Drive-by-Wire)系統所構成的巨型移動伺服器,為了確保這些複雜系統在極端駕駛情境(如冰雪路面打滑、緊急迴避)下的絕對安全性,國際標準組織(ISO)近年來頒布了極度嚴苛的規範。
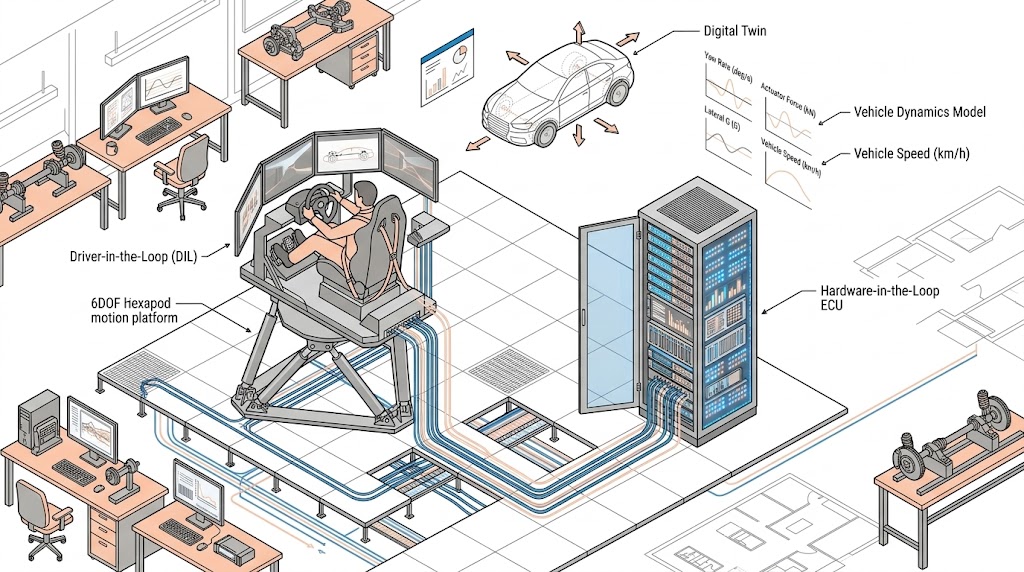
除了為人熟知的 ISO 26262(道路車輛功能安全)之外,最新版的 ISO 21448(預期功能安全,SOTIF)明確要求研發團隊必須針對「未知且不安全」的邊緣情境(Edge Cases)進行窮舉驗證,由於在真實開放道路上測試這些極端失控情境具備極高的生命風險與成本,全球頂尖車廠已全面轉向實驗室內的「數位孿生(Digital Twin)」架構。其中,結合了真實人類駕駛反應的「駕駛者迴路(Driver-in-the-Loop, DIL)」與整合實體車輛控制器的「硬體迴路(Hardware-in-the-Loop, HIL)」動態模擬系統,成為了符合法規驗證的唯一解方。
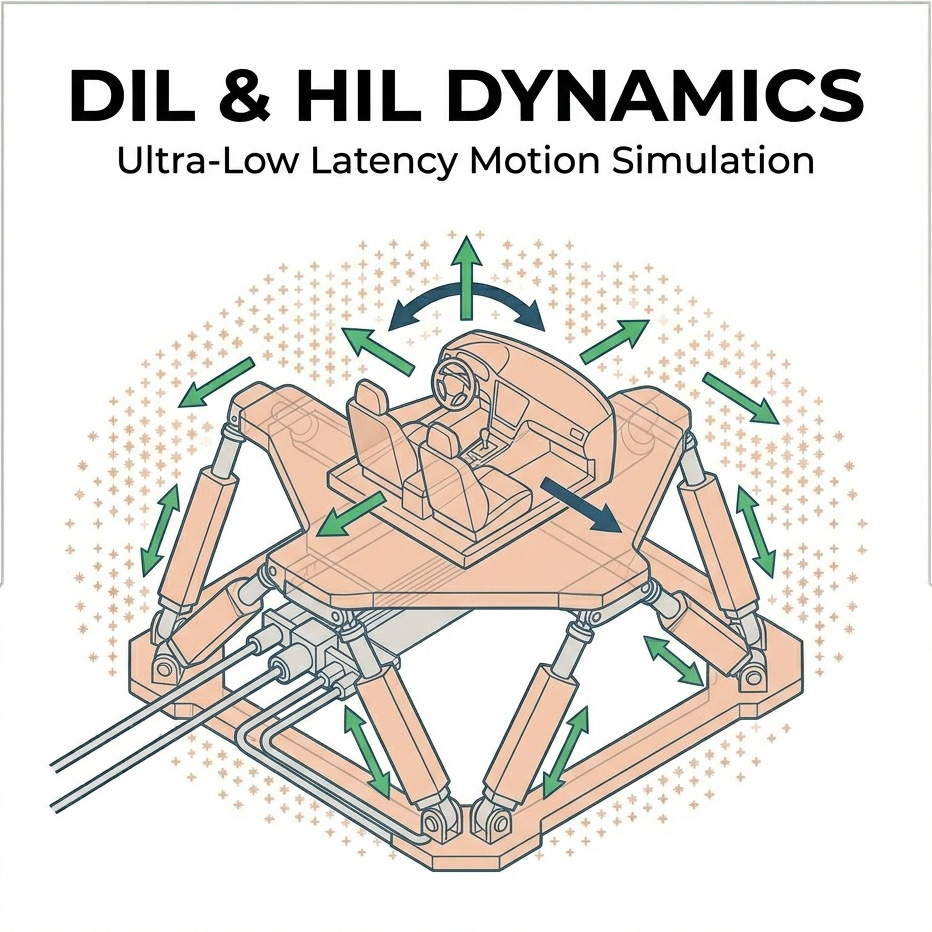
一套合格的 DIL 動態模擬系統,必須透過六自由度(6DOF,包含縱向、橫向、垂直、滾轉、俯仰、偏航)的物理運動,完美欺騙人類的感知系統,讓試車手在實驗室內獲得與真實賽道完全一致的動態回饋,然而,當測試工程師試圖將虛擬的車輛物理模型與龐大的機械動感平台進行整合時,實務上將遭遇三大難題。
DIL 迴路中的時序脫節與前庭覺矛盾(Simulator Sickness)
在 DIL 測試架構中,人類駕駛員是整個閉迴路控制系統中最敏感的感測器,人類感知車輛動態主要依賴兩大系統:視覺神經與內耳的前庭系統(Vestibular System),前庭系統對於瞬間的線性加速度與角加速度變化極度敏銳。
當試車手在模擬器中猛打方向盤或踩下煞車時,虛擬引擎(如六自由度空氣動力學與輪胎模型)會瞬間計算出車輛的姿態改變向量,理想狀態下視覺畫面的更新與動感平台的物理傾斜必須在同一個時間截面上發生,然而傳統的大型工業動感平台,受限於沉重的機械慣性、老舊的控制架構以及非即時的通訊協定,從接收到姿態指令到平台實際產生物理位移,往往存在高達數十毫秒甚至超過一百毫秒的傳輸與作動延遲(Latency)。
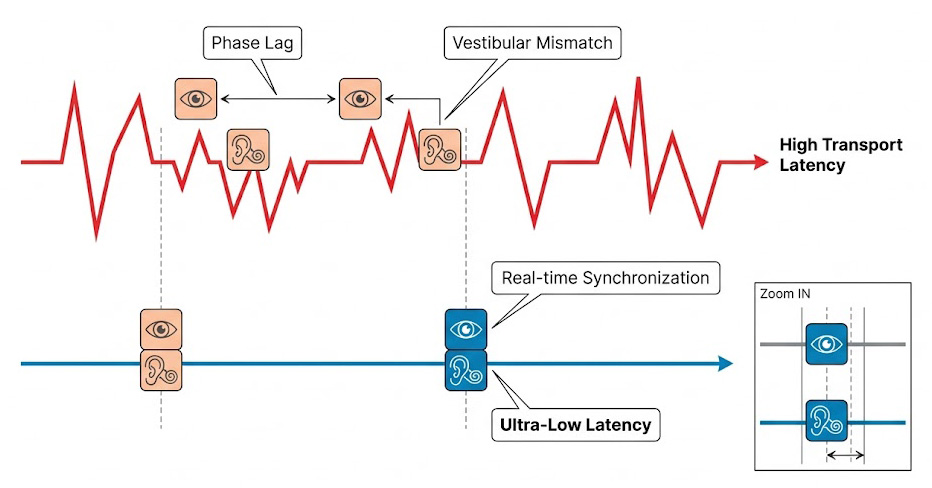
這種「視覺畫面已經傾斜,但身體(前庭覺)卻還沒感受到重力變化」的時序相位落後(Phase Lag),會在短短幾分鐘內引發嚴重的模擬器暈動症(Simulator Sickness),更致命的是對於 HIL 系統中的車輛防滑循跡控制器(TCS)或車身動態穩定系統(ESC)而言,這種硬體延遲會破壞控制迴路中的相位裕度,導致控制器產生錯誤的超前或落後補償,最終使得演算法在模擬器中呈現發散與震盪,讓耗資千萬的測試數據完全失去工程參考價值。要達到專業級的 DIL 驗證標準,整個系統的端到端延遲與時序必須被無情地壓縮至極低水準,達成完美的動態對齊。
高頻路感頻譜的機械過濾與 NVH 觸覺回饋失真
車輛在行駛過程中所產生的物理震動頻譜極為寬廣,零至二赫茲(Hz)的低頻訊號通常代表了車輛過彎、加速與煞車時的總體 G 力變化;而二十赫茲至一百赫茲以上的中高頻訊號,則包含了引擎的運轉震動、防鎖死煞車系統(ABS)作動時的踏板回饋,以及輪胎壓過路緣石或碎石路面時的細微紋理,這些高頻的「觸覺回饋(Haptic Feedback)」是試車手判斷車輛極限與 NVH(噪音、震動與聲振粗糙度)特性的關鍵指標。
在實務上傳統的液壓平台或採用重型梯形螺桿的低階電動平台,其設計初衷是為了提供巨大的推力與承載力,這類系統具備極大的運動質量(Moving Mass),且機械傳動機構之間必然存在微小的齒輪咬合間隙(Backlash),根據物理學的慣性定律,龐大的質量根本無法進行每秒數百次的極速方向切換;同時,機械間隙會將那些微小的高頻震幅完全吸收或轉化為無意義的金屬撞擊噪音。
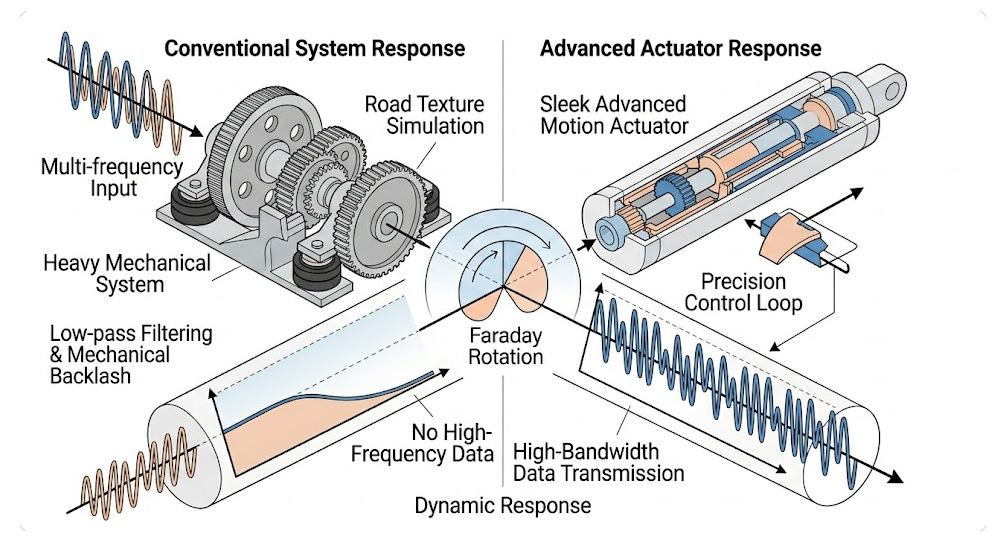
結果就是,這類傳統平台在物理層面上形成了一個天然的「低通濾波器(Low-pass Filter)」,無論兵推主機輸出的路面紋理數據多麼精細,動感平台都無法如實重現高頻微震,這導致試車手感覺像是在駕駛一艘漂浮在水面上的氣墊船,完全喪失了與路面之間的連結感,進而無法精確調校懸吊系統的阻尼參數或驗證底盤的疲勞壽命。
非線性循跡防滑(Traction Loss)的多軸耦合極限與樞軸點矛盾
為了在有限的室內空間中模擬車輛連續過彎的持續性 G 力,動感平台必須依賴高階的「洗出演算法(Washout Filter)」,洗出演算法會利用低通濾波器與「傾斜協調(Tilt-Coordination)」技術,在車輛加速時將平台緩慢向後傾斜,利用地心引力的分量將駕駛員壓在椅背上,同時視覺畫面保持水平,藉此欺騙大腦產生持續向前的加速感。
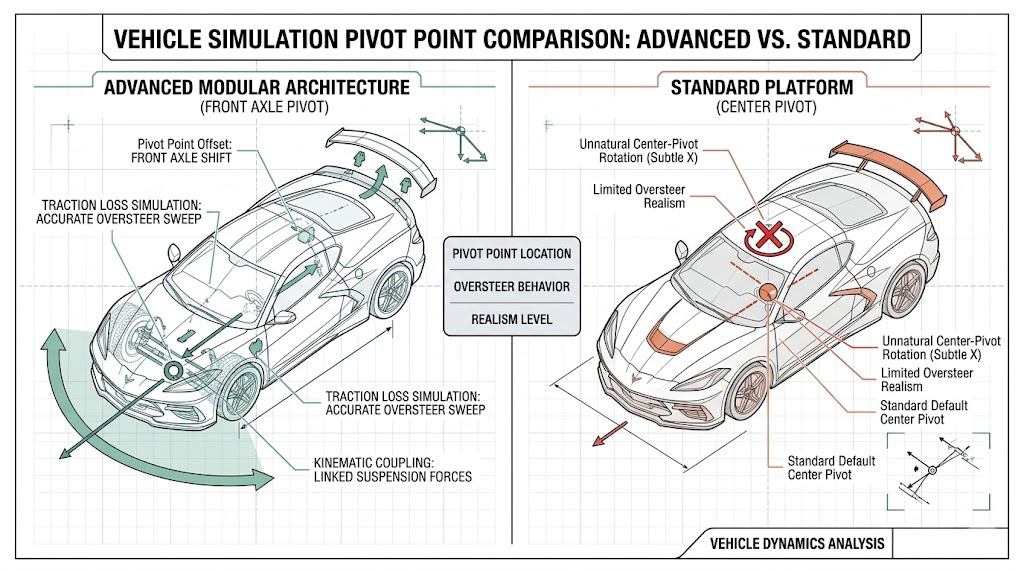
然而,當測試進入極端的「車尾打滑(Oversteer)」或「循跡喪失(Traction Loss)」情境時,標準機構將遭遇幾何運動學上的矛盾,在真實世界中,後輪打滑意味著車尾產生了劇烈的橫向位移,其旋轉的樞軸點(Pivot Point)通常位於車輛的前軸附近,但一般平台在進行偏航(Yaw)運動時,其幾何旋轉中心必定位於平台的正中央(即駕駛者的座位正下方)。若演算法與硬體架構無法協同突破此一物理限制,試車手會感受到一種原地旋轉的「堆高機式」轉向感,這與真實賽車車尾甩動的物理動態背道而馳。
為了解決這個問題,頂尖的模擬架構必須具備高度的「模組化架構」與強大的「數位控制迴路(Digital Control Loops)」,當複雜的循跡防滑與六軸平台本身的側傾(Sway)同時作動時,若異質控制系統之間缺乏微秒級的頻譜分割與時序對齊,機械力將會產生疊加效應,導致致動器過載或產生強烈的科氏力(Coriolis Force)錯覺,徹底摧毀 DIL 測試的真實性。
面對車輛動力學與先進 ADAS 演算法在動態驗證上的嚴苛挑戰,我們提供專為高階模擬與測試工程打造的動態解決方案,透過精選的歐洲頂尖動感控制技術,協助客戶打破實驗室的物理限制,釋放 DIL 與 HIL 驗證的最高潛能。
完美整合駕駛者與車輛動態:SANLAB DIL駕駛者迴路模擬器
針對難題一的時序脫節與難題二的高頻路感缺失,我們推薦導入 SM1800 駕駛閉環(DIL)模擬器,這是一套專為極致敏捷性與精密人機介面打造的次世代動態模擬系統。

SM1800 是一款 1800kg 級 6DOF DIL 模擬平台,專為車輛動力學測試、原型開發與駕駛員評估而設計,具備 HIL 支援、IPG Truckmaker 整合與 ±9 m/s² 垂盪加速度,提供 R&D 過程中最真實、最安全的閉環模擬體驗。
- SANLAB DIL Simulator 採用了具備高頻寬頻率響應的先進動感技術。系統搭載了專門調校的數位控制迴路,確保長時間運行依然穩定無漂移。
- 在 DIL 測試中,該系統能提供極低延遲的動態回饋,完美消除了視覺與前庭覺之間的相位落後,確保測試數據的有效性並大幅減少暈動症。更關鍵的是,其進階運動提示(Advanced motion cueing)與控制演算法,能精準重現極其細微的觸覺回饋,讓試車手能清晰感知車輛打滑瞬間的邊緣狀態與路面紋理,為 NVH 工程與底盤調校提供最真實的物理參考。
精準克服多軸耦合與高頻寬需求:SANLAB SMotion 中輕型六軸動感平台
為解決循跡防滑模擬中的樞軸點矛盾與複雜多軸耦合,我們提供具備高度模組化架構的 SANLAB SMotion 中輕型系列(如 SM100、SM500、SM1000 等型號)。

探索最先進的動態模擬與測試解決方案,從六軸動態平台、DIL 駕駛在環模擬到重機具與軍事戰術訓練,我們提供高擬真、低風險的驗證環境,協助企業加速研發數據蒐集並提升操作人員的專業技能。
- 這些平台具備卓越的機械設計與數位控制邏輯,其模組化架構使得平台能夠輕鬆適應從輕量級賽車座艙到標準轎車座艙的各種特定需求,SMotion 系列內建的高階洗出演算法(Washout Filter)與運動控制系統,能有效分割並對齊複雜的頻譜數據。
- 透過直覺的圖形使用者介面(GUI)與確定性錯誤碼(Deterministic error codes)模擬軟體,工程師能夠輕鬆定義非線性運動的極限包絡線,當虛擬模型傳遞車尾打滑(Traction Loss)的姿態時,系統能藉由強大的動態運算,完美重現偏移的樞軸點與側向 G 力,避免不自然的「原地打轉」感,徹底釋放 HIL 與 DIL 測試的幾何限制。
極限重載與商用車輛耐久驗證:SANLAB SMotion 重型工業級平台
針對需要模擬大型巴士、重型卡車或主戰坦克(MBT)等具備巨大慣性的特殊載具,我們提供 SANLAB SMotion 重型系列(涵蓋 SM3000、SM6000,最高可達 14 噸負載的 SM14.000),以應對極限載荷的挑戰。

SMotion14000 是一款 14000kg 超旗艦級有效負載、1030mm 超長行程的 6DOF 運動平台,具備 22,000 kg·m² 頂級慣性矩,專為最嚴苛的航太、鐵道或結構耐久性測試而設計。
- 面對龐大且沉重的整車或全尺寸測試艙,SANLAB 重型平台展現了無可匹敵的結構剛性與卓越的控制力,系統提供高達 1030mm 的超長致動器行程,並支援強悍的有效載荷極限。
- 在進行重型商用車輛或特殊載具的底盤疲勞測試與 HIL 驗證時,SANLAB 長行程平台能完美模擬跨越深坑或惡劣越野地形的深幅俯仰與起伏。其先進的運動控制系統確保在承受數噸重量進行激烈的動態搖晃時,依然能維持極高的伺服精準度與反應速度,為極端環境下的車輛動力學開發提供最具公信力的工業級測試基石。
連結虛擬驗證與現實操作的橋樑,在絕對受控的環境中,提供精準的評估數據、技能養成與系統驗證。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答,實際系統配置將因應您的 DIL/HIL 測試應用、法規規範、實驗室場地空間限制及動態待測物特性而有所不同。如需深入規劃與軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的動態模擬與系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。