
突破大陣列感測器極限:混合式 NUC (Hybrid NUC) 的熱動力學與演算法校正策略
隨著邊緣運算與神經網路演算法的微縮化,無人載具 (UAV) 的光電酬載系統已全面跨入百萬畫素等級的大陣列時代,無論是基於非冷卻微測輻射熱計 (Microbolometer) 還是高階冷卻型中波紅外線 (MWIR) 探測器,感測器陣列的幾何規模已從傳統的標準畫質急遽擴張至 1024x1024,甚至朝向 2048x2048 的超大像素矩陣 (Mega-pixel Arrays) 邁進,這種空間取樣頻率的指數級增長,賦予了無人機在超視距 (Beyond Visual Line of Sight, BVLOS) 條件下極致的目標特徵提取能力;然而,從半導體晶圓製造與焦平面陣列 (FPA) 或發射器陣列的物理本質來看,當陣列規模擴大時,像素間的幾何尺寸公差、熱傳導係數變異、以及光電轉換增益的非線性漂移,會以統計學上的機率分佈擴散至整個視場中,這些微觀的物理缺陷,最終將在影像上疊加形成高頻的空間固定模式雜訊 (Fixed Pattern Noise, FPN) 與低頻的區域性熱梯度。
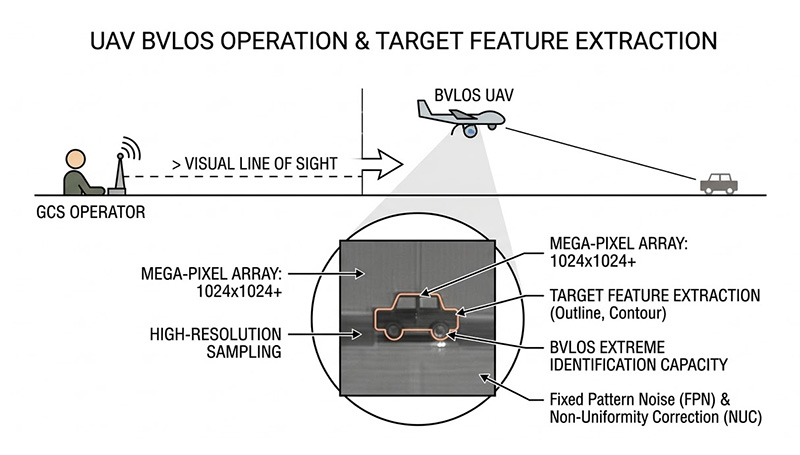
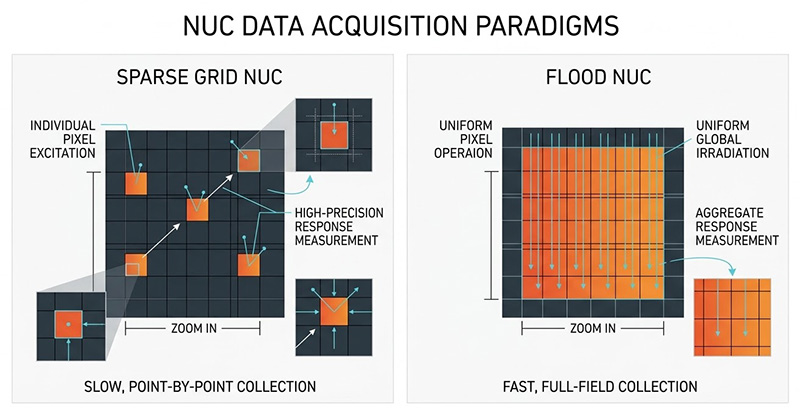
對於 2026 年主導軍工與航太應用的 AI 機器視覺系統而言,影像數據的「輻射絕對純淨度」遠比人類視覺的動態對比度更為關鍵,任何殘留的空間雜訊,都會在卷積神經網路 (CNN) 的邊緣檢測層中被錯誤解譯為實體特徵,進而引發追蹤演算法的災難性脫鎖;因此,為了抹平這些先天物理差異,系統必須執行極度嚴格的非均勻性校正 (Non-Uniformity Correction, NUC)。 在過去十年的工程實務中,NUC 演算法主要依賴兩種截然不同的資料採集範式:「稀疏網格法 (Sparse Grid NUC)」與「泛光法 (Flood NUC)」,稀疏網格法透過逐一激發相互隔離的像素,能精確量測單一像元的獨立輻射響應;而泛光法則透過全域一致的熱輻射照射,以極快的時間獲取整體的巨觀響應。
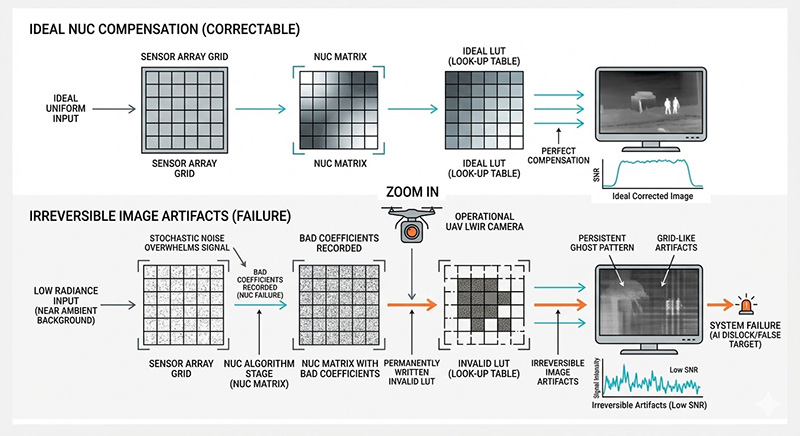
然而,隨著測試規範的要求逐漸逼近熱力學雜訊極限,單一的 NUC 演算法在應對新一代高動態範圍、大陣列系統時,已遭遇了不可跨越的物理與數學壁壘,現代無人機不僅需要偵測極端高溫的尾焰,更需要在接近環境背景溫度 (Ambient Background) 的極低輻射條件下,分辨出只有數十毫開爾文 (mK) 溫差的隱蔽目標,在這種極低輻射區間,光子的隨機泊松雜訊 (Poisson Noise) 與系統的熱電子雜訊,會嚴重干擾校正矩陣的收斂,若強行採用傳統演算法進行全域補償,不僅無法消除雜訊,反而會將錯誤的修正係數寫入查找表 (LUT) 中,造成不可逆的影像假影 (Artifacts),這迫使光電測試領域必須從根本上重構 NUC 的數學模型與擷取邏輯,以滿足最嚴苛的量測標準。在實務操作上,測試工程師與演算法架構師正面臨著以下三大極度棘手的技術難題。
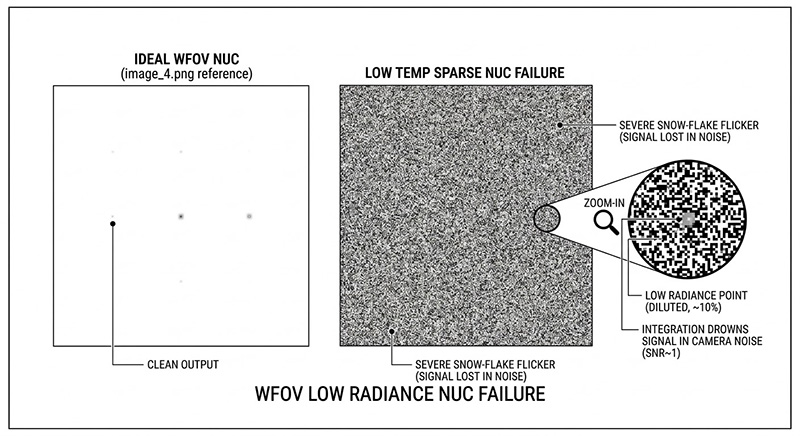
低輻射區間稀疏網格的訊噪比 (SNR) 崩潰極限
在執行精確的單一像素特性化時,稀疏網格法是數學上的最佳解,然而,當待測目標處於接近常溫(例如攝氏 0 度至 30 度)的低輻射狀態時,此方法面臨嚴重的光學取樣挑戰,由於測試相機的像素解析度通常低於超大陣列發射器,單一發射像素映射到相機感測器上時,往往僅佔據相機像素面積的 10% 至 20%,這導致進入相機的有效輻射通量被極度稀釋(訊號衰減 5 到 10 倍);在低溫背景下,若要計算單一像元的能量,演算法必須將波峰周圍多個相機像素的數值進行積分加總,此時,相機本身的背景雜訊已經與微弱的目標訊號相當(SNR 接近 1),若強行在低輻射區間採用稀疏網格進行 NUC,提取出的增益係數將被龐大的隨機雜訊淹沒,導致最終影像呈現劇烈的雪花狀閃爍。
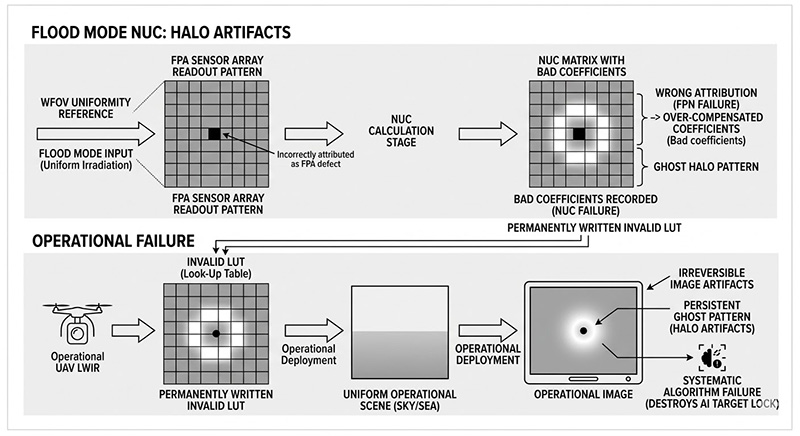
泛光取樣中的空間混疊與盲元過度補償災難
為了克服低輻射區間的 SNR 問題,工程師通常會轉向泛光法 (Flood NUC),一次點亮所有像素以獲取足夠的整體輻射能量,但泛光法的致命缺陷在於「缺乏空間解析力」,在緊密排列的大陣列中,相鄰像素的光學擴散點函數 (PSF) 會相互重疊,若陣列中存在物理損壞的「盲元 (Dead Pixels)」或極端暗像素,該區域的整體輻射量會呈現物理性的下陷;由於泛光演算法無法分辨這是單一盲元造成的,還是整個區域響應不足,它會直接計算出極高的增益補償係數,強加於該盲元周遭所有正常的像素上,結果導致在實際運作時,每一個盲元的周圍都會出現一圈異常明亮的「光暈假影 (Halo Artifacts)」,這對 AI 演算法的特徵辨識是毀滅性的干擾。
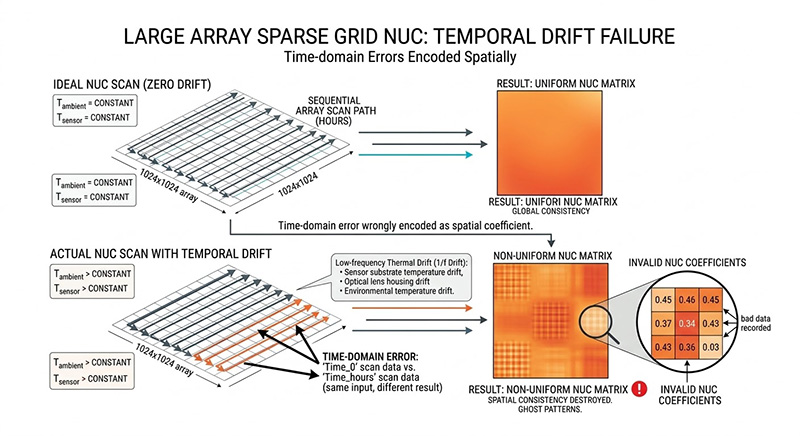
大陣列完整資料擷取的時域漂移 (Temporal Drift) 悖論
百萬畫素等級的陣列需要龐大的資料擷取次數。若完全依賴高精度的稀疏網格法掃描整個 1024x1024 陣列,並涵蓋高低溫的完整動態範圍,整個測試週期動輒耗費數小時甚至更長,在如此漫長的時間跨度內,測試相機內部的感測器基板、光學鏡頭的外殼,乃至於實驗室的環境溫度,都會產生低頻的熱漂移 (1/f Drift),這種時間維度上的物理漂移會直接耦合進入空間維度的輻射量測數據中,導致先掃描的陣列區域與數小時後掃描的區域,即使輸入相同的驅動電流,也會計算出截然不同的輻射基準。這種將時域誤差錯誤編碼為空間補償係數的現象,徹底摧毀了 NUC 校正的全局一致性。
面對上述嚴苛的測試挑戰與大陣列感測器的物理極限,奧創系統推薦導入 SBIR 混合式 NUC (Hybrid NUC) 演算法與自動化測試架構,此技術已深度整合於 IRWindows™ 5 軟體 與 MIRAGE-XL 等高解析度動態紅外線場景投影系統中,我們深知,突破百萬畫素級別的均勻度瓶頸絕非單純的硬體規格堆疊(Box Moving),而是必須提供從數學建模、資料擷取邏輯到硬體底層寫入的「從模擬到驗證的一站式方案 (Turnkey Solution)」。

SBIR 場景投影系統核心為紅外線發射器陣列,專為硬體迴路(HIL)、FLIR、反制模擬及追蹤系統測試設計,其能產生動態高擬真紅外線影像,為國防與航太關鍵技術開發測試提供重要工具。

SBIR MIRAGE XL DXP 為動態紅外線場景投影系統,核心是高解析度紅外線發射器,產生模擬場景;可選擇客製化準直儀調整光束,客製化發射器滿足特殊需求;命令與控制電子設備供操作監控,場景投射範例展示模擬影像;整體而言,MIRAGE XL DXP 透過客製化光學電子組件,為測試模擬提供精確可控的紅外線刺激。
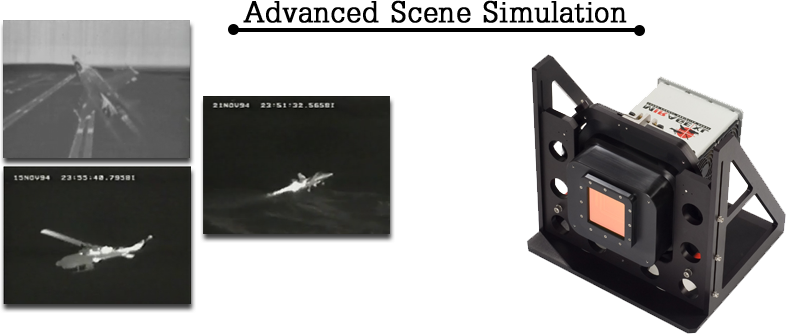
SBIR 先進場景模擬方案以 MIRAGE 系列動態紅外線場景投影機為核心,產生高解析度紅外線影像,模擬複雜熱環境與目標;左側展示動態場景模擬範例,具時間戳記,模擬真實世界熱變化;MIRAGE 紅外線投影機應用於先進場景模擬,產生逼真動態影像,滿足國防、航太等領域精確測試評估需求。
為了解決稀疏網格在低輻射區間的 SNR 崩潰,以及泛光法帶來的光暈假影,SBIR 的混合式 NUC 演算法採用了極具突破性的雙軌融合策略,系統首先在高輻射(高溫)區間使用稀疏網格法,精確定位並校正所有的極端離群值 (Outliers) 與盲元,建立一個高保真度的基礎校正矩陣,隨後在低輻射(近常溫)區間,系統無縫切換至泛光模式進行快速採樣,將數小時的低溫量測時間大幅壓縮至短短數分鐘內,從物理根源上避開了時域熱漂移的干擾。
更關鍵的是,針對泛光法導致的盲元過度補償問題,該方案內建了「反向稀疏網格 (Inverse Sparse Grid)」與死像素映射技術。在泛光校正介入前,系統能精準計算出盲元造成的輻射損失,並在數學模型中預先扣除這部分誤差,確保周遭健康像素的補償係數絕對純淨,協助客戶符合最嚴格的 AI 邊緣視覺測試規範,透過這種反覆運算的混合架構,我們能將大陣列系統在寬廣動態範圍內的殘餘非均勻度穩定壓制在 3% 甚至 1% 以下,極大化提升測試效率與最終產品的成像品質。
立即聯繫奧創系統讓我們協助您找到最適合您實驗室的完美解答或者實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。