

Automation1 GL4
振鏡雷射掃描頭線性驅動器
為高精度雷射掃描應用,提供無與倫比的動態控制與系統整合能力
Automation1 GL4 是一款高效能的閉迴路雙軸線性伺服驅動器,專為控制Aerotech的 AGV 雷射掃描頭而設計,其具備超過 24-bit 的有效掃描解析度,並搭載 無限視野 (Infinite Field of View, IFOV)、位置同步輸出 (Position Synchronized Output, PSO) 以及 強化掃描器控制 (Enhanced Scanner Control, ESC) 等先進功能,使 GL4 在嚴苛的高精度應用中,成為卓越的掃描頭驅動解決方案。
設計特點
- 具備 100 kHz 的軌跡更新率與 200 kHz 的伺服更新率,能有效消除因高速運動造成的加工件變形,例如圓形加工時的頸縮現象以及邊角圓弧化問題。
- 有效掃描解析度高於 24 位元,為 Aerotech AGV 掃描儀系列產品提供了業界領先的解析度表現,從而實現微米等級的精度與重複性。
- 內建即時二維校準功能,可同時進行平面失真與功率校正,確保雷射光點的精準定位及均勻的功率分佈。
- 提供外部時脈輸入埠,可與鎖模雷射 (mode-locked lasers) 進行同步運作。
- 無限視野 (IFOV) 功能整合了標準的直線與旋轉運動,可在絕大多數的工作範圍內,產生具有個位數微米精度的掃描軌跡。
- 位置同步輸出 (PSO) 功能允許在高達 12.5 MHZ 的頻率下觸發雷射脈衝,延遲時間低至 80 奈秒,實現了真正的空間域脈衝控制。
- 選配的強化掃描器控制 (ESC) 是一種即時軌跡優化工具,可顯著改善所有運動類型的追蹤誤差。
Automation1 控制平台
搭載 Automation1 控制平台,此款 GL4 不僅是一個掃描頭驅動器,更是一個功能齊全、以電腦為運算核心的即時自動化控制器,最多可控制 32 個伺服軸或 5 組掃描器,它能夠協調多達 64 個同時運作的平行任務,並透過 AeroScript™ 編程語言控制整套機台,或者,使用者也可利用 .NET、C 和 Python 的 API 來開發自訂的人機介面 (HMI),其低延遲的 HyperWire 網路架構讓所有軸都能執行低延遲運動,從而實現複雜的運動學應用,例如:整合雷射掃描頭與伺服軸的五軸輪廓加工,此為市場上其他掃描器控制方案所無法企及的整合能力。
驅動業界最高精度與動態效能的掃描頭
GL4 雙軸線性伺服驅動器是專為搭配下列 AGV 掃描頭而設計,您可以使用它來驅動單一的二維掃描器,也能與 Automation1 XL4 線性單相伺服驅動器協同運作,用以控制 AGV 三維及五維掃描頭,所有裝置皆透過 HyperWire 通訊匯流排連接。
- AGV-HP(O) - 高精度二維掃描器
- AGV-XP(O) - 極致動態、高精度二維掃描器
- AGV-3D - 高精度三維掃描器
- AGV-5D - 五軸微加工進動掃描器
先進的軟體與電子設計
GL4 採用了先進的內插補點電子技術,可提供高達 26 位元的有效解析度,憑藉其 200kHz 的全伺服狀態控制,GL4 利用閉迴路位置回饋,並透過前饋速度控制來實現零追蹤誤差的軌跡運動,其強化追蹤控制 (Enhanced Tracking Control, ETC) 軟體更可進行精確的馬達調校與軌跡映射,此外,內建的即時二維校準功能可確保光點在整個掃描視野內都能精準定位。
無限視野 (Infinite Field of View, IFOV)
Aerotech的無限視野 (IFOV) 是一套獨特的業界領先解決方案,用於同步化線性或旋轉伺服軸與雷射掃描器的運動,IFOV 不僅能顯著提升產能,更能消除因加工區域重疊或錯位所導致的拼接誤差與工件品質問題,透過結合振鏡掃描器的高動態性能與伺服平台的長行程範圍,此技術能夠連續加工遠大於掃描器傳統視野的工件,完全無需拼接獨立的工作區域。
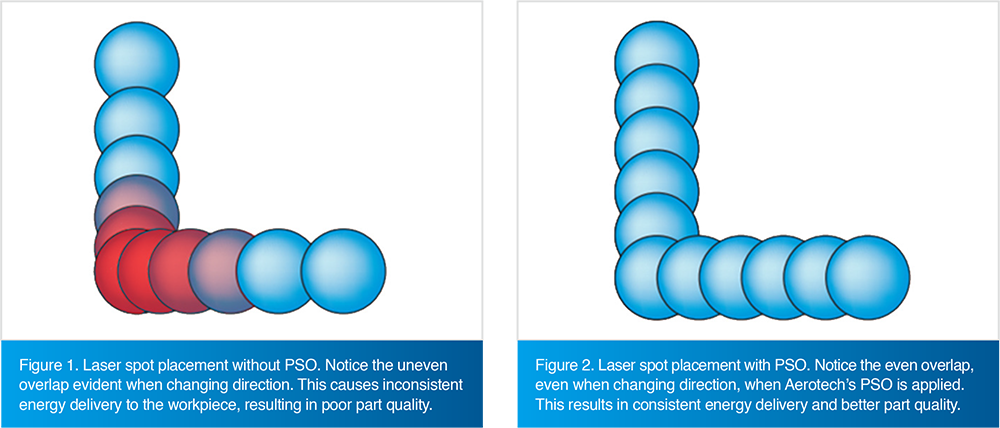
位置同步輸出 (Position Synchronized Output, PSO)
Aerotech的位置同步輸出 (PSO) 功能可讓您根據 X/Y 軸的位置精確地觸發雷射光點,這是Aerotech應用於雷射加工的線性定位平台的一項關鍵功能(如圖 1 和圖 2 所示),GL4 將此功能延伸至掃描器應用,無論是在掃描器的有效區域內,或是在由傳統線性和旋轉運動驅動的更大無限視野 (IFOV) 中皆可適用,這種根據位置精確觸發雷射的能力,免除了編寫標記 (mark)、跳轉 (jump) 和多邊形延遲 (polygon delays) 的需求,進而降低了編程的複雜性,此款掃描器獨有的功能可支援高達 12.5 MHz 的雷射脈衝指令,延遲時間低至 80 奈秒,即使在最高加速度的軌跡下,也能實現真正的空間域脈衝控制。
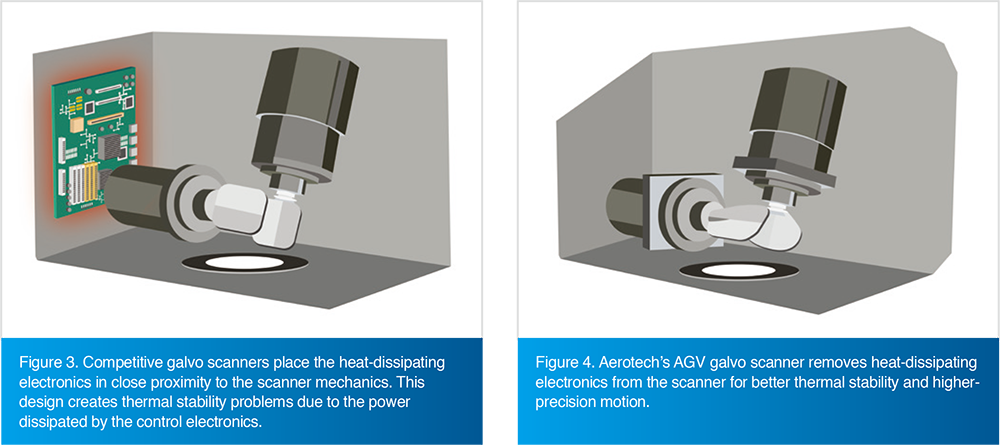
遠端線性放大器與驅動架構
GL4 採用線性放大器驅動,此為驅動振鏡掃描頭馬達最穩定且高效能的方式,可提供更佳的速度控制與定位穩定性,此設計將放大器與伺服驅動元件整合於 GL4 的機箱中,並刻意與振鏡掃描頭(例如 AGV-HP(O))分離,目的是為了最小化熱雜訊與漂移,同時減輕掃描頭的質量與縮小其體積,將熱源從掃描器中移除可有效提升系統精度(如圖 3 和圖 4 所示),最大化其效能與精密度,這也正是Aerotech的掃描器解決方案與眾不同之處。
強化掃描器控制 (Enhanced Scanner Control, ESC)
GL4 提供選配的強化掃描器控制 (ESC) 功能,這是一套強大的驅動硬體與韌體配置,當與 AGV-HPO、AGV-XPO、AGV3D 或 AGV5D 產品搭配使用時,能夠對所有運動類型進行即時軌跡優化,對於任何會實質影響掃描器產能的運動輪廓,此功能都能帶來顯著的產能提升。
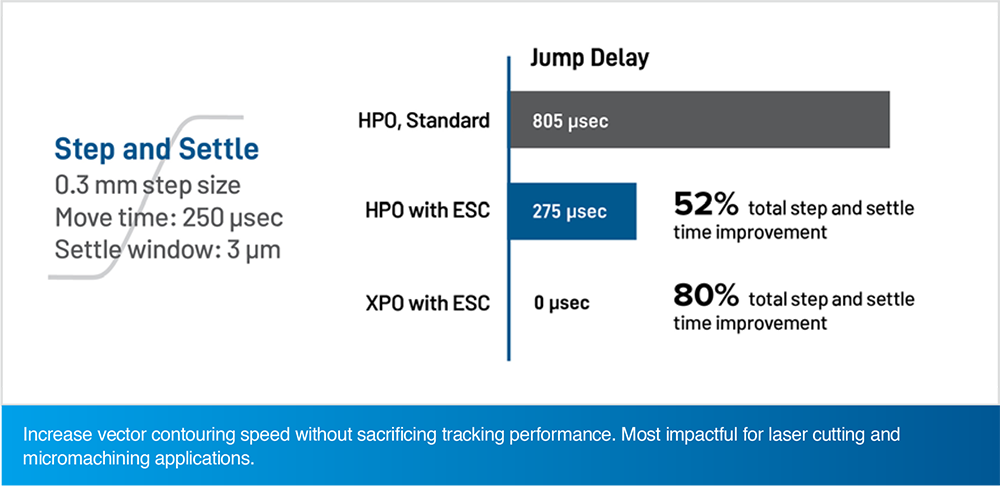
執行步進與整定 (step and settle) 運動時能更快達到穩定狀態,從而最小化或完全消除高頻運動中的跳轉延遲。

能夠在不犧牲追蹤精度的情況下,以更高的速度執行高頻圓形輪廓運動,這使得焊接、切割和鑽孔等掃描運動輪廓得以加速。

以向量運動執行高精度切割輪廓,其加工產能將超出預期。
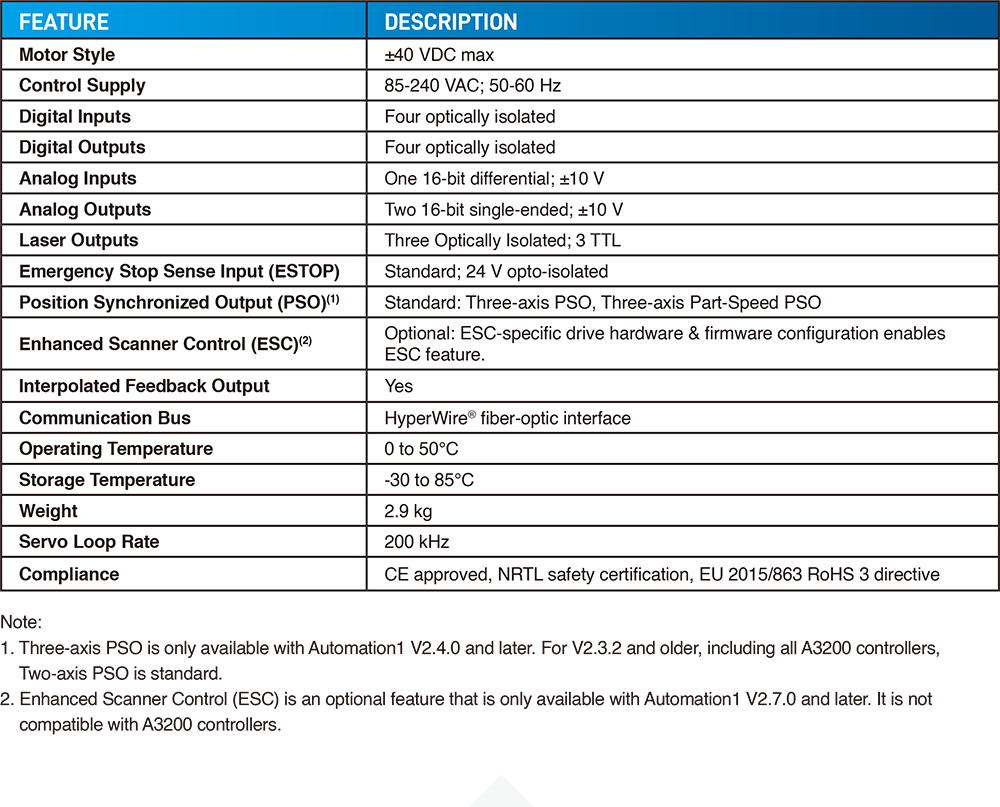
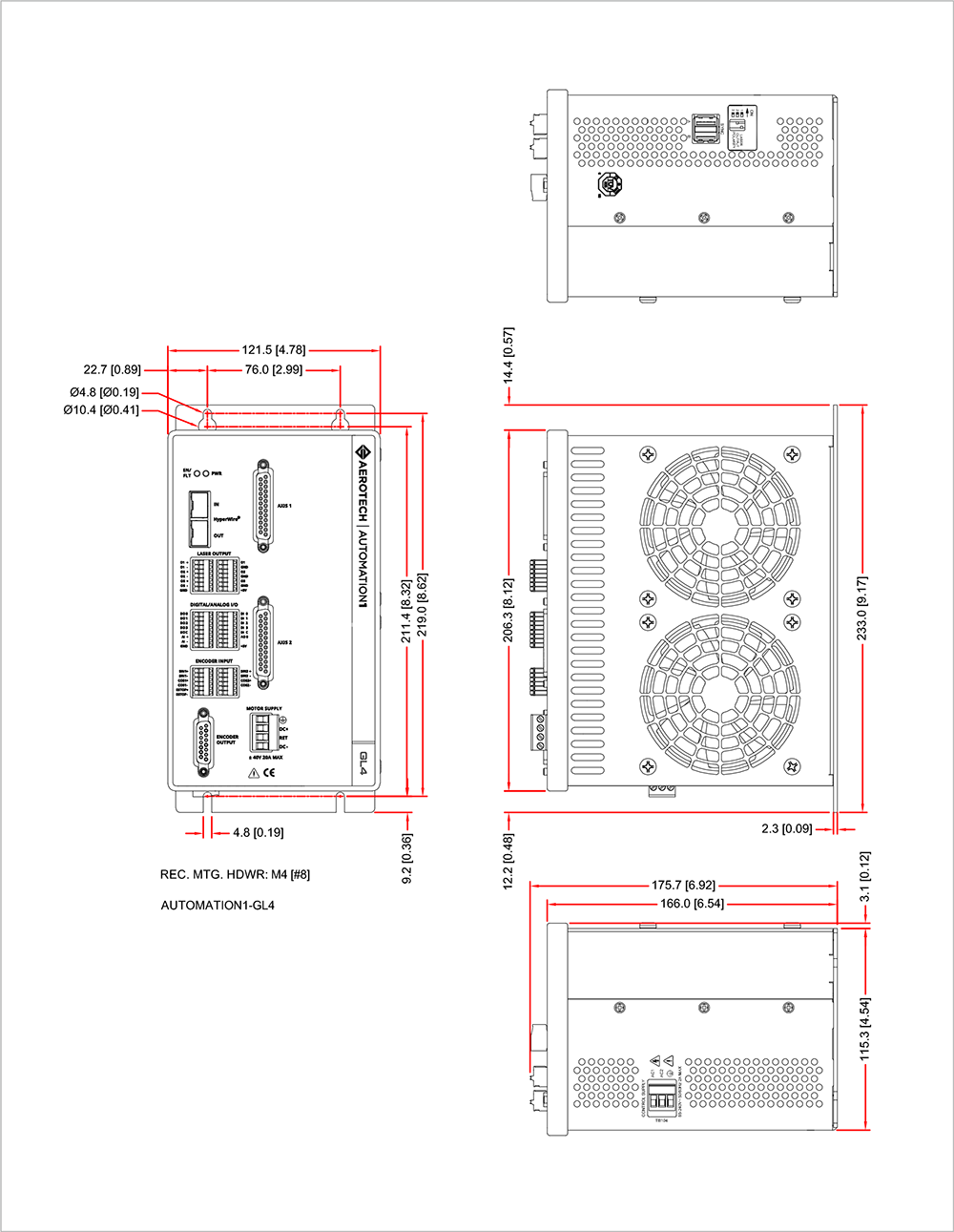
技術規格
機構尺寸
訂購資訊
