

動態控制工具箱 (DCT) 進階控制器層級演算法
透過諧波消除、指令整定與跨軸前饋
實現無與倫比的運動控制精度與系統產能
Aerotech 動態控制工具箱 Dynamic Controls Toolbox (DCT) 整合了一系列控制器層級的演算法,用以改善設備定位精度、提升處理產能與縮短系統週期時間,使用者可透過工具箱中提供的參數對這些演算法進行精確的配置。
DCT 演算法源於多年來在運動控制系統領域的深度優化經驗,立即將 DCT 工具應用於您的系統,即可實現最佳化的運動控制效能。
主要特點
- 提升整體系統效能
- 降低追蹤誤差 (tracking error)
- 抑制正弦波干擾
- 過濾非必要的頻率
- 最小化離軸位置誤差
Automation1 平台
Automation1 動態控制工具箱是使用者友善的 Automation1 運動控制平台的一部分,該平台完整整合了以下項目:
- 開發軟體
- 控制器
- 馬達驅動器
- HyperWire® 光纖通訊匯流排
諧波消除
此功能可有效降低因正弦波參考指令、馬達頓轉力矩漣波 (motor force ripple)、或其他位置相依性干擾所造成的追蹤誤差,同時也能抑制因旋轉軸不平衡對線性軸產生的跨軸干擾,進而提升系統的整體運動效能。
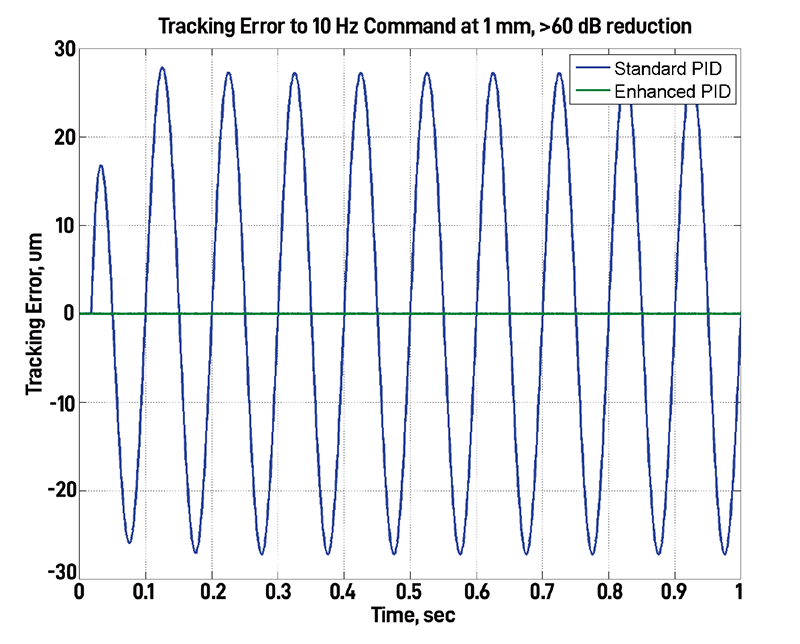 透過諧波消除 (Harmonic Cancellation) 功能,可顯著改善系統追蹤效能,在 10 Hz 的運動指令下,相較於標準 PID 控制器(藍線)所產生的大幅追蹤誤差,啟用 DCT 後的增強型 PID(綠線)能將誤差抑制至趨近於零,實現 >60 dB 的效能提升。
透過諧波消除 (Harmonic Cancellation) 功能,可顯著改善系統追蹤效能,在 10 Hz 的運動指令下,相較於標準 PID 控制器(藍線)所產生的大幅追蹤誤差,啟用 DCT 後的增強型 PID(綠線)能將誤差抑制至趨近於零,實現 >60 dB 的效能提升。
指令整定
此功能可從位置、速度與加速度的運動指令中,精確過濾掉非必要的頻率成分,確保運動軌跡的平滑與穩定。
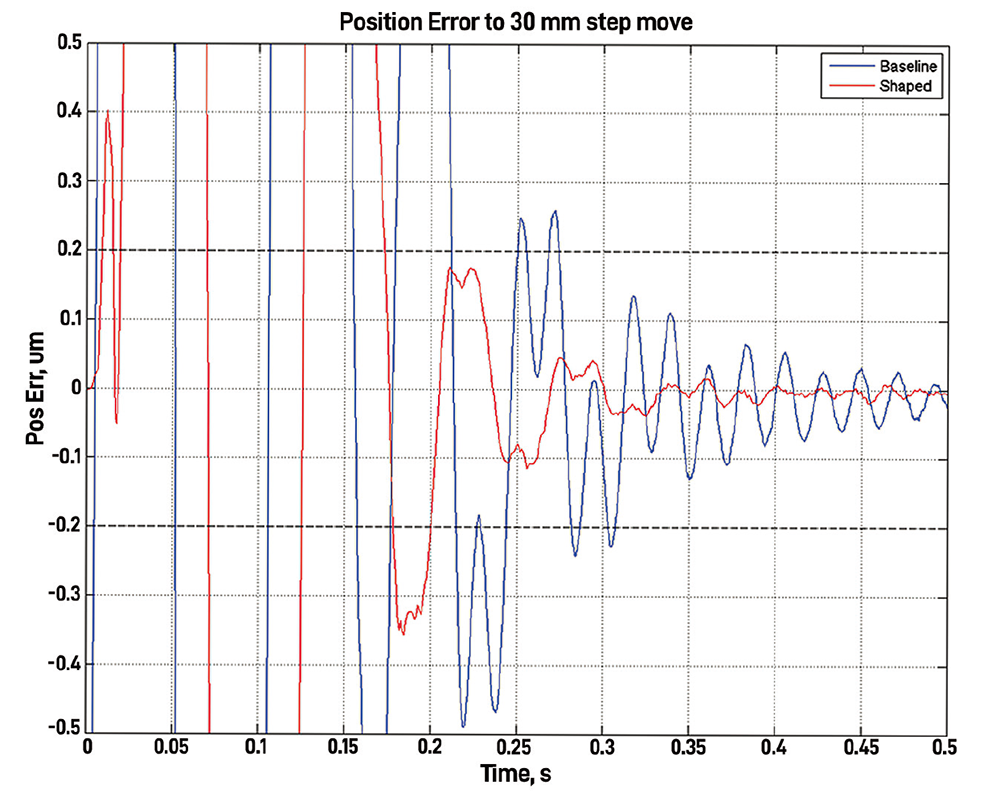
指令整定 (Command Shaping) 功能可有效抑制運動後的殘餘振動,圖中顯示在 30 mm 步進運動後,相較於基準效能(藍線),經過指令整定(紅線)的系統能大幅減少位置誤差的振盪幅度,並顯著縮短整定時間,進而提升機台產能。
跨軸前饋
此功能透過將前饋增益產生的驅動電流,妥善分配至不同軸向上的多個馬達,可顯著最小化系統運動過程中產生的離軸位置誤差。
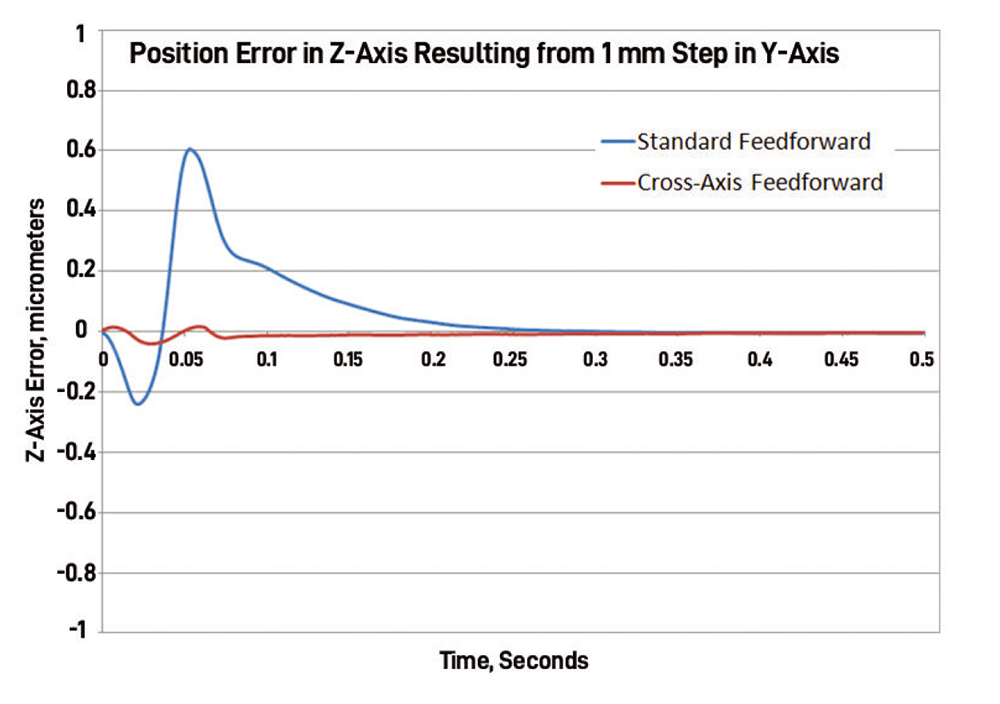
跨軸前饋 (Cross-Axis Feedforward) 能補償機械的耦合效應,當 Y 軸進行 1 mm 步進運動時,標準前饋(藍線)會在 Z 軸引發明顯誤差;啟用跨軸前饋(紅線)後,此離軸誤差幾乎被完全抑制,可確保多軸運動的軌跡精度。
影音展示
Automation1 Command Shaping
Automation1 Harmonic Cancellation
訂購資訊

資源下載
Advanced Controller-Level Algorithms Dynamic Controls Toolbox Data Sheet