EPICS & TANGO 分散式控制系統專用驅動程式
整合開源標準與硬體效能,以 PSO 功能精準同步實驗流程與資料擷取
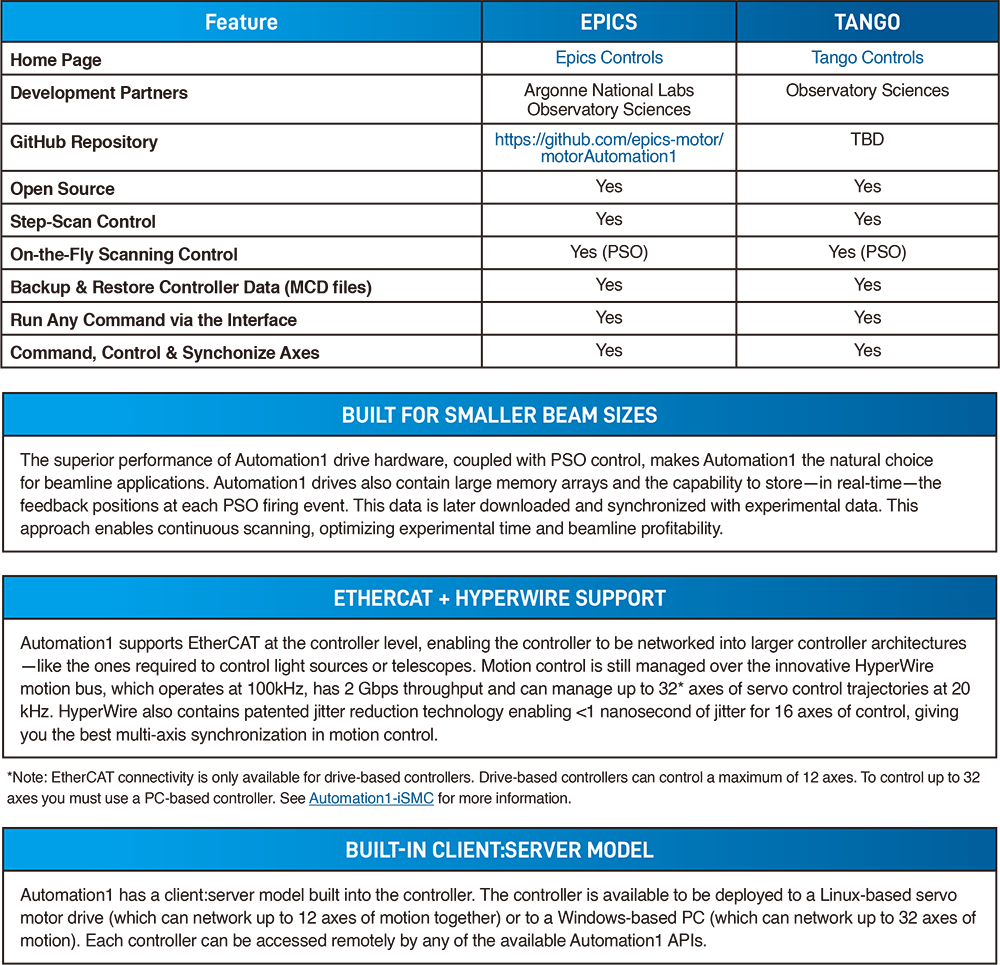
Aerotech與 Argonne National Laboratory 和 Observatory Sciences 的實驗室控制系統專家合作,共同開發了適用於 Automation1 運動控制平台的 EPICS 與 TANGO 驅動程式,這表示此運動控制器驅動程式不僅可立即投入使用、更具備一個開源的操作介面,同時 Automation1 也提供 .NET、C 與 Python API,用以建構 Windows 和 Linux 應用程式。
EPICS(Experimental Physics and Industrial Control System) 與 TANGO(TAco Next Generation Objects) 為使用實驗科學設施的科學家們提供了一套共通語言,而Aerotech的 Automation1 運動控制平台作為精密運動控制領域的卓越標準,其整合了新一代的 PWM(脈衝寬度調變) 與線性放大器技術、優異的配置與設定工具、絕對式編碼器支援、創新的 HyperWire 光纖運動匯流排,以及Aerotech獨特的 PSO(Position Synchronized Output,位置同步輸出) 功能,此功能可依據軸的實際位置來觸發外部事件,讓感測器觸發與位置擷取的流程變得直接而簡易。
關鍵特點
- 本驅動程式為可立即使用的開源裝置驅動程式,由Aerotech與 Argonne National Laboratory 及 Observatory Sciences 攜手開發。
- 運動控制的整合流程極為簡易,所有功能均經過完整測試與驗證。
- 驅動程式採用開源架構,提供高度的彈性與透明度。
- 完整釋放 Aerotech 運動控制的強大效能,實現更精密的控制能力。
- 強化 PSO(位置同步輸出)功能,實現以位置為核心的製程控制。
- 全面支援絕對式編碼器與 EtherCat,擴大系統的相容性與應用範圍。
- 具備強大的配置與參數調整工具,簡化系統設定與優化流程。
- 支援開發 Linux 作業系統的應用程式,滿足跨平台開發需求。
Automation1 平台
此 Automation1 EPICS & TANGO 驅動程式是使用者友善的 Automation1 運動控制平台的一部分,該平台包含了以下幾個核心元件:
- 開發軟體
- 控制器
- 馬達驅動器
- HyperWire® 光纖通訊匯流排
技術規格