

AeroScriptPlus 進階控制程式
光學對位、多軸刀具中心點控制與雷射鑽孔優化演算法,賦予控制器精準執行複雜製程的運算核心
透過 AeroScriptPlus 進階控制程式,您能夠在 Automation1-iSMC 控制器配置中,運行任何 AeroScriptPlus 進階控制程式的檔案,其內容包含 AeroscriptPlus DrillOptimizer、AeroAlign 光學對位演算法,以及刀具中心點 (Tool Center Point, TCP) 編程系統配置,您可透過 Automation1 Studio 中的 AeroScript 編程語言,或經由 Automation1 的 .NET、Python 及 C API 來存取 AeroScriptPlus 進階控制程式的功能。
AeroScriptPlus 進階控制程式是特別設計的 AeroScript 函式庫檔案,您可使用產品配置器,客製化所需功能並完成下單,每個程式都為特定的系統與應用提供專屬的預設功能,這些檔案經過加密,並且僅能在已配置 AeroScriptPlus 進階控制程式的 Automation1 控制器上運行。
更多 AeroScriptPlus 進階控制程式即將在 Automation1 平台上推出,其功能也將持續精進。
特點
- 優化雷射鑽孔作業。
- 解決如光學對位與刀具中心點編程等複雜問題。
- 在您部署的每台控制器上啟用 AeroScriptPlus 進階控制程式的功能。
- 僅需單一授權,即可同時運行多個 AeroScriptPlus 進階控制程式。
- 包含專為複雜應用編寫的程式,可直接取用。
Automation1
此 Automation1 AeroScriptPlus 進階控制程式的特點為使用者友善的 Automation1 運動控制平台的一部分,該平台包含以下項目:
- 開發軟體
- 控制器
- 馬達驅動器
- 光纖 HyperWire® 通訊匯流排
AeroAlign 光學對位演算法
AeroAlign 光學對位演算法可執行搜尋程序,用以對齊光纖、光子學及光學元件的功率訊號,光學對位通常是一個兩步驟的流程,首先是偵測初始功率,或稱為尋找初始光 (finding first light),接著進行功率優化,雖然並非所有對位優化演算法都設計用來尋找初始光,此類演算法需要一個初始功率訊號才能運作,但專為尋找初始光設計的演算法則無此需求,部分演算法能夠同時執行初始光對位與功率優化,適用於您製程的演算法、或演算法組合,取決於您的應用參數。
刀具中心點編程
刀具中心點編程 (Tool Center Point Programming, TCP) 讓您能以工件座標建立運動程式,此座標系統獨立於實體機台的結構,對於三軸線性笛卡爾 X/Y/Z 系統而言,TCP 的實現相當容易,因為刀具在工件空間中的位置與機台軸向之間存在固定的偏移量。
然而,當系統中存在一個或多個旋轉軸時,計算會變得更加複雜,原因在於工件座標與機台座標之間不再有固定的對應關係,從工件座標計算出機台座標需要應用旋轉矩陣;Automation1 能夠即時將工件座標轉換為機台座標,支援最多達六個自由度(三個線性、三個旋轉)的致動器。
雷射鑽孔優化
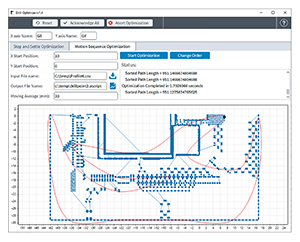
AeroscriptPLUS DrillOptimizer 能夠針對數千至數百萬個通孔的鑽孔路徑與運動參數進行特定輪廓的優化,使用者可藉此功能為 Aerotech 的 AGV 檢流計雷射掃描頭產品(AGV-HPO 和 AGV-XPO)實現量產規模的效能,同時將設定時間降至最低,DrillOptimizer 提供一個兩步驟流程,首先,它會為檢流計雷射掃描頭找出最短的移動路徑,接著,它會優化驅動器與雷射掃描頭馬達,確保 100% 的移動都符合您特定的品質標準,DrillOptimizer 可透過 Automation1 Studio 以獨立使用者介面的形式提供,或以 .NET DLL 的形式提供,使其能輕易整合至您的機台 HMI (Human-Machine Interface) 中。
AeroAlign 光學對位演算法
AeroAlign1D
一維初始光或峰值搜尋
AeroAlign1D 功能用於沿著單一自由度搜尋局部功率峰值或已定義的功率閾值,此演算法能對定義的一維區域執行完整掃描,並返回最大(或最小)功率點,也可設定在達到使用者定義的功率閾值時終止運動並停留在該位置。

AeroAlignSpiral
二維初始光或峰值搜尋
AeroAlignSpiral 功能用於沿著兩個自由度搜尋局部功率峰值或已定義的功率閾值,此演算法能對定義的圓形二維區域執行完整掃描,並返回最大(或最小)功率點,也可設定在達到使用者定義的功率閾值時終止運動並停留在該位置。

AeroAlignDynamic
二維峰值搜尋
AeroAlignDynamic 功能有兩種主要用途,其一,它可以優化兩個自由度的位置以尋找功率峰值,其二,它可以動態追蹤現有峰值的位置,在識別初始光後,AeroAlignDynamic 會攀升至一個局部功率峰值,然後可選擇在達到使用者定義的閾值時停止,或在使用者定義的時間段內持續追蹤該峰值的移動。

AeroAlignFast
多維度峰值搜尋
AeroAlignFast 功能使用一種迭代搜尋程序,以識別功率訊號超過使用者定義閾值的位置,此演算法支援最多六個自由度,並可應用於多種運動學結構中,包含跨越多個對位平台的操作。

刀具中心點編程
TCP 機床標準
在機床產業中,存在著關聯線性軸與旋轉軸,並定義所有軸向正向移動方向的標準,遵循這些標準可以消除在預期機台軸向如何回應工件空間中指令運動時的不確定性。
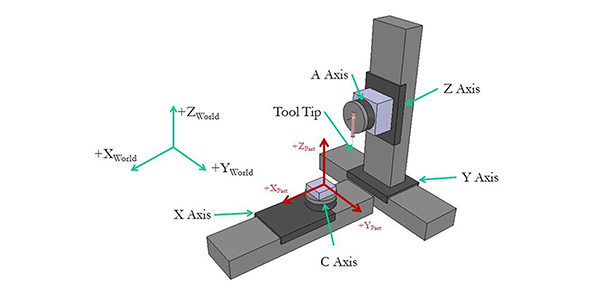
工件座標系中的正向移動方向與軸向方位,依據右手定則定義,如右圖所示,左圖為正向線性移動慣例,右圖為正向角度移動慣例。

TCP 機床標準
旋轉運動圍繞著工件的線性軸進行,其關係如右圖所示,當 TCP 啟動時,A 軸會繞著工件的 X 軸旋轉刀具中心點,B 軸會繞著工件的 Y 軸旋轉刀具中心點,而 C 軸則會繞著 Z 軸旋轉刀具中心點。
機台配置
為了執行 TCP 運動學計算,控制器必須知道刀具、工件和旋轉軸的位置,以及旋轉軸的配置。
偏移位置配置
一種建立機台配置的常用方法是,指定旋轉軸旋轉點與刀具和工件位置之間的偏移量,此配置模式允許輸入以其與所連接的工件或刀尖距離為準的座標。
絕對位置配置
另一種常用方法是,採用一個「世界」座標框架,並在此框架中標定所有系統元件的絕對位置。
加速度限制
CoordinatedAccelLimit 參數會在執行非相切的線性移動時,停止或減緩路徑速度,而 DependentCoordinatedAccelLimit 參數則會在執行非相切的旋轉軸移動時,停止或減緩程式速度。
請注意: 在需要恆定表面速度的應用中,改變速度對加工過程可能造成的影響,或將限制加速度限制功能的使用。
指令速度濾波
可將一個低通 IIR 濾波器 (TrajectoryIIRFilter) 或一個移動平均 FIR 濾波器 (TrajectoryFIRFilter) 應用於虛擬軸及/或實體軸的速度指令,此濾波器會持續作用,並透過對所有移動之間的過渡進行圓滑化處理來修改程式路徑,即使是那些未表現出大加速度的過渡也會被處理。
線性伺服軸的位置是從虛擬 x/y/z 軸與伺服旋轉軸的指令位置計算而來,應對虛擬 x/y/z 軸與實體 A/B/C 軸應用相似的濾波器設定,以確保用於計算伺服 X/Y/Z 位置的指令位置相位一致。
請注意: 對伺服旋轉 A/B/C 軸及伺服 X/Y/Z 軸應用濾波器,將導致伺服 X/Y/Z 軸的位置指令落後於伺服旋轉軸的位置指令。
路徑優化
前導/後收移動或稱為「空中書寫 (skywriting)」的技術,在 X/Y 應用中被普遍使用,以確保刀具僅在恆定速度下與材料接觸,在三維形狀上計算前導移動或空中書寫序列更為複雜,因為插入的路徑幾何形狀不能引起工件與刀具之間的碰撞,此過程通常包含在兩個非相切特徵之間插入一個後收移動與一個前導移動,刀具會在後收移動之前以恆定表面速度關閉,路徑速度在後收移動期間減速至 0,接著控制器移動至前導移動的起點,該起點與下一個路徑段相切,系統在前導移動期間達到恆定速度,並在前導移動結束時啟用刀具。
雷射鑽孔優化
路徑優化
特定輪廓的路徑優化
在數秒內為超過 1,000,000 個鑽孔位置組織出最短的路徑距離,可針對單一視野 (FOV) 或包含儀器視野 (IFOV) 進行路徑組織。
運動優化
驅動與馬達參數優化
優化 AGV 雷射掃描頭硬體,使其在使用者定義的整定視窗內,以最高效能執行 100% 的移動,完全消除雷射觸發與運動整定所需的任何延遲。

執行框架
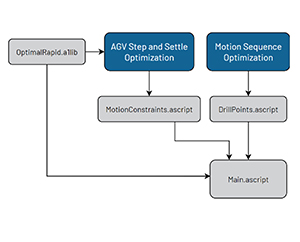
OptimalRapid 函式庫與程式執行
OptimalRapid 是一個 AeroscriptPlus 進階控制程式的函式庫,它運用路徑優化與運動優化的輸出結果,來執行一個包含點位列表的輕量化小型程式,此程式能夠快速迭代不同的運動輪廓與優化參數,使用者可藉此功能進行迭代,並迅速達到量產規模的效能。
API
.NET Dll
DrillOptimizer 包含一個用於執行路徑優化與運動優化的 Windows .exe 執行檔,以及一個 .NET Dll 函式庫,讓機台製造商能將其功能整合至客製化的機台 HMI 中。

訂購資訊
