
零跑道限制的夜鷹:具備 Sub-Cloud 任務能力的 VTOL 自主無人機發展趨勢與驗證
邁入 2026 年針對邊境安全與高強度反恐作戰的戰術需求,無人載具的部署環境已從傳統的平實地貌與備便跑道,轉向極端地形與不可預測的惡劣氣候,具備「雲下(Sub-Cloud)」任務能力與垂直起降(VTOL)構型的固定翼自主無人機,因其兼具旋翼機的零跑道部署靈活性與固定翼的長航時、高酬載特性,已成為戰術情報、監視與偵察(ISR)的核心載體;然而依據最新版航空電子與軍規可靠度標準(如 DO-178C 與 MIL-STD-810H 進階環境規範),要求此類具備高度自主性之飛行器,必須在失去全球導航衛星系統(GNSS-Denied)以及遭遇劇烈氣象變化(如低雲層、強側風、無光照明)的極端邊緣案例(Edge-cases)下,仍能保證飛控電腦(Flight Control Computer, FCC)與多光譜感測器的穩定運作。
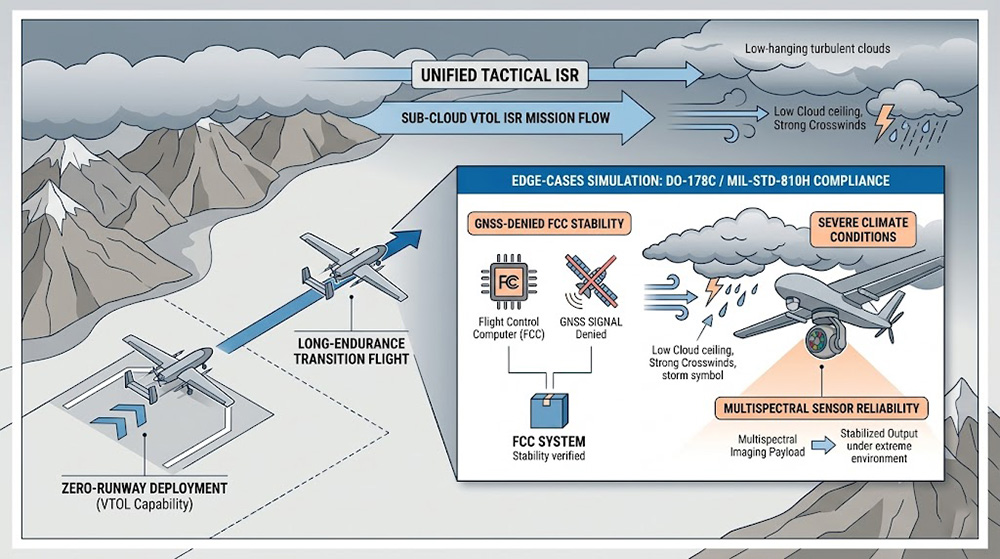
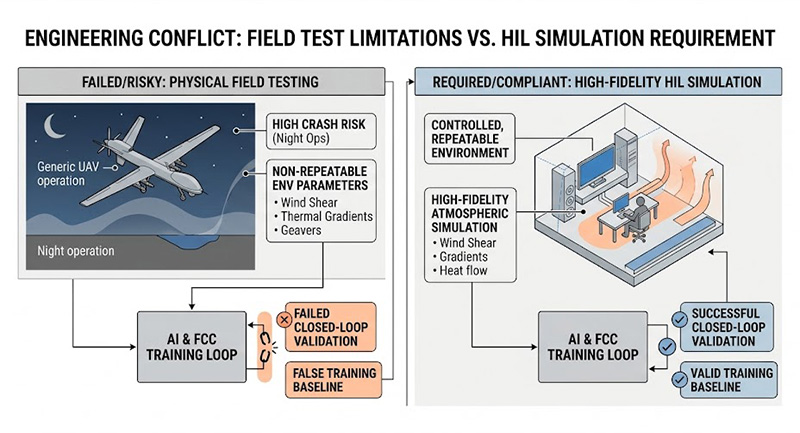
此一趨勢迫使測試驗證的標準變得空前嚴格,在實體空域進行全天候與夜間的極端邊界測試,不僅具有極高的墜機風險,且大氣環境參數(如風切、大氣折射率、熱梯度)具備高度的不可重複性(Non-deterministic),無法滿足飛控邏輯與 AI 目標追蹤演算法在收斂訓練過程中的閉環驗證(Closed-loop validation)需求,因此建立具備高度物理保真(Physical Fidelity)的硬體迴路(Hardware-in-the-Loop, HIL)模擬環境,成為唯一合規的工程解決途徑,實務上工程團隊在建構此類系統時,面臨著三大難以跨越的技術難題。
旋翼與定翼非線性氣動力轉換之動態建模保真度
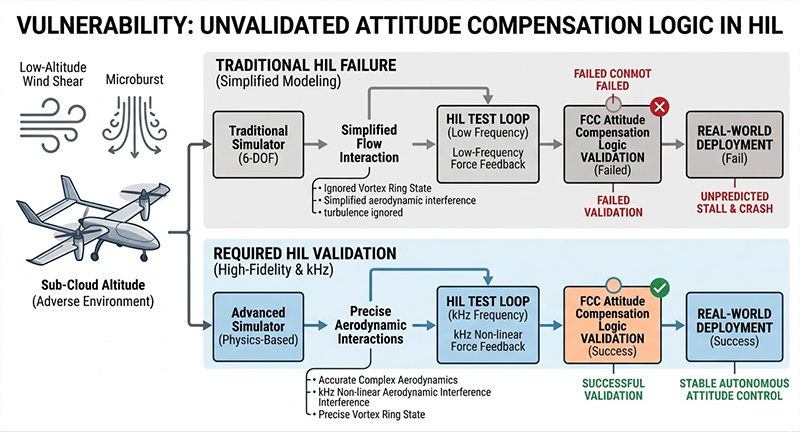
VTOL 固定翼無人機最脆弱的飛行階段,在於起飛後從垂直推力過渡到水平氣動升力的轉換期(Transition Phase),在次雲層(Sub-Cloud)高度,飛行器極易遭遇強烈的低空風切與微爆流(Microbursts),傳統模擬器往往僅採用簡化的六自由度(6-DOF)通用力學模型,無法精確運算多旋翼在複雜氣流交疊下產生的渦流環狀態(Vortex Ring State)與氣動干擾,若 HIL 測試台無法以千赫茲(kHz)級別的更新率,將這些非線性擾動力回饋給飛控系統,將導致自主姿態補償邏輯(Attitude Compensation Logic)驗證失真,進而在實機部署時發生無法預期的失速墜毀。
極端天候與夜間低照度下的多光譜感測器(EO/IR)融合失效邊界驗證
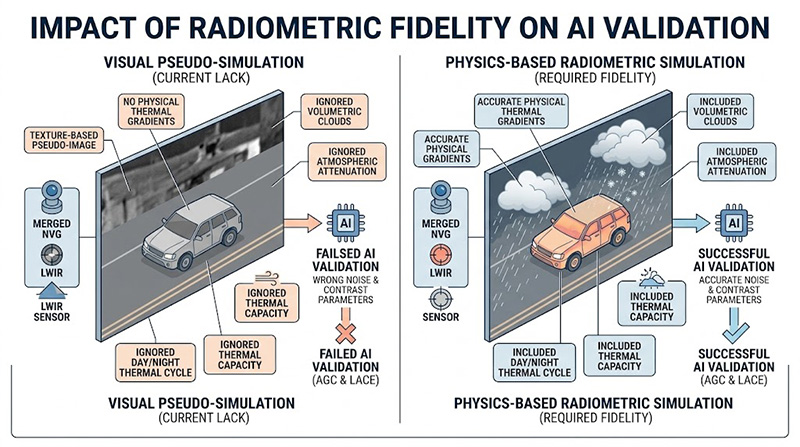
在反恐與邊防任務中,飛行器需於夜間或濃霧中鎖定微小移動目標,這要求酬載系統能融合微光夜視(NVG)與長波紅外線(LWIR)數據,然而工程師在實驗室內難以產生具有物理意義的熱輻射梯度變化,市面上多數的影像引擎僅能提供基於紋理貼圖的「視覺假象」,無法即時運算包含容積雲(Volumetric Clouds)、雨雪散射、大氣衰減效應以及目標物基於熱容量(Thermal Capacity)的日夜熱特徵變化,感測器模擬若缺乏此等輻射度保真(Radiometric Fidelity),將導致 AI 追蹤演算法獲得錯誤的雜訊與對比度參數,無法有效驗證自動增益控制(AGC)與局部對比度增強(LACE)的運作極限。
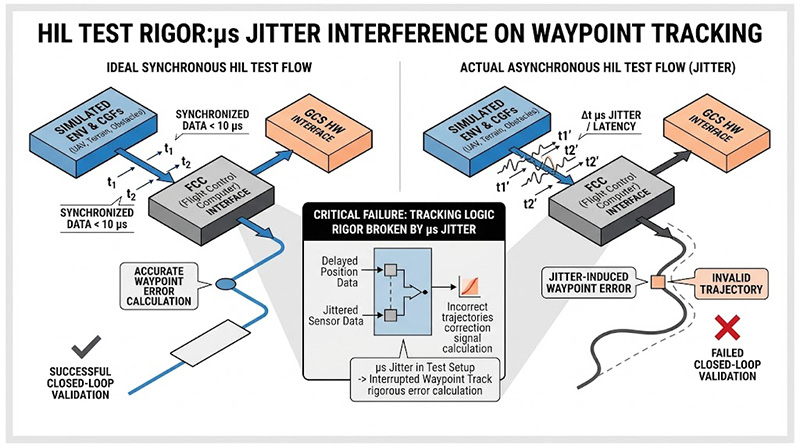
指管鏈路中斷(Loss of Link)與自主任務降級的異步延遲挑戰
Sub-Cloud 任務經常伴隨地形遮蔽導致的超視距(BVLOS)通訊中斷,測試規範要求無人機在與地面控制站(GCS)失去連線時,必須無縫切換至自主導航、威脅規避並執行自動返航(RTH),在 HIL 測試架構中,要同步模擬複雜的戰術合成環境(包含地面移動目標與動態障礙物)並與真實的 GCS 硬體對接,經常會面臨網路封包延遲與畫面幀數掉幀(Jitter),只要發生微秒級的非同步,即會干擾航點追蹤(Waypoint Tracking)誤差值的計算,徹底破壞閉環系統的測試嚴謹性。
面對上述嚴苛的測試,奧創系統推薦導入 Quantum3D 專為具備 VTOL 與自主飛行能力之無人載具所設計的軍規級模擬與硬體驗證平台,我們深知針對高階飛控與夜視感測器的邊緣案例驗證,拼湊單點設備無法解決問題;奧創系統的優勢在於,我們不是賣盒子(Box Moving),而是提供「從模擬到驗證的一站式方案 (Turnkey Solution)」。
針對次雲層(Sub-Cloud)無人機的開發與測試,我們的整合方案能有效協助客戶符合規範並提升測試效率:
QUAV 雲下自主 VTOL 無人機系統
作為驗證平台的核心載體,QUAV 具備垂直起降與完全自主飛行能力,不依賴跑道即可部署,其支援高達 11 磅的酬載能力,可完美整合高解析度光電與紅外線(EO/IR)感測器,執行日夜偵察與航點追蹤,為團隊提供最可靠的實機比對參考。
Quantum3D QUAV 是一款固定翼雲下自主無人機(Sub-Cloud Autonomous UAV),具備垂直起降(VTOL)、長航時、模組化載荷與自主飛行能力,可用於軍事、情報、環保、農業與災害應變等多領域應用。
高擬真 UAV 模擬訓練與 HIL 測試站
透過具備雙觸控螢幕、IP67 防護等級的真實地面控制站(GCS)硬體,結合內建的前視紅外線(FLIR)與相機模擬功能,工程師可直接在環驗證自動駕駛演算法與通訊失聯(Loss of Link)的自動返航機制,並執行酬載操作員的夜視追蹤訓練。
UAV 無人機訓練系統結合高擬真飛行模擬、任務規劃與感測器模擬功能,支援多機型操作與團隊任務訓練,可攜式 IP67 結構,適用於教室與野外訓練環境。
MANTIS 與 ViXsen 物理級感測器模擬
針對夜間與惡劣氣候測試,整合高階運算節點與 ViXsen 模組,可即時渲染 16-bit 高動態範圍(HDR)的長波紅外線(LWIR)與微光夜視(NVG)物理熱特徵,並生成 3D 體積雲、雨雪與強風等動態氣候干擾,確保 AI 演算法與感測器能獲得最精確的數據回饋。
Quest2 與 ViXsen 提供即時感測器模擬,支援電光(EO)、紅外線(IR)、夜視(NVG)影像處理與物理模擬,MANTIS 方案助您實現精確的感測器影像與後處理效果。
立即聯繫奧創系統,讓我們協助您找到最適合您實驗室的完美解答;實際系統配置將因應您的測試應用、規範標準、場地限制及待測物特性而有所不同。如需深入規劃與系統軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。