
自動駕駛的精準之眼:GNSS與IMU耦合及車輛模型的工程實踐與高傳真模擬驗證
導論:自動駕駛對連續、高精度定位的極致需求
自動駕駛技術的飛速發展,正引領我們駛向一個更安全、更高效、更便捷的出行未來,從L2級的輔助駕駛到L5級的完全自主駕駛,每一個等級的提升都對車輛的環境感知、決策規劃以及定位定向能力提出了更高的要求。在這其中,連續、高精度、高可靠性的定位資訊,無疑是自動駕駛車輛安全行駛的「眼睛」和「羅盤」。
全球導航衛星系統(GNSS)以其全天候、全球覆蓋的特性,成為自動駕駛定位系統不可或缺的一環。然而,在複雜的真實駕駛環境中,尤其是在高樓林立的都市峽谷、隧道、樹蔭遮蔽路段,GNSS訊號容易受到多路徑效應、訊號遮擋、甚至惡意干擾的影響,導致定位精度下降、輸出中斷,無法滿足自動駕駛對PNT(定位、導航與授時)資訊的嚴苛需求。
為彌補GNSS的不足,慣性測量單元(Inertial Measurement Unit, IMU)以其獨特的優勢成為了理想的互補感測器,IMU由陀螺儀和加速度計組成,能夠以極高的更新率(通常數百Hz至kHz)自主提供載體的姿態、速度和位置變化量,具有良好的短期定位精度和抗干擾能力,能夠在GNSS訊號失效時進行航位推算(Dead Reckoning);然而,IMU的誤差會隨時間累積,導致長期定位結果漂移,因此,如何將GNSS的長期絕對定位精度與IMU的短期相對定位精度及高更新率有機結合,實現優勢互補,成為自動駕駛高精度定位技術的核心課題。進一步地,整合車輛本身的運動學與動力學模型,則為這一融合難題提供了更深層次的解決思路。
GNSS+IMU整合的三重境界:從鬆耦合到深耦合
GNSS與IMU的整合,根據兩者數據融合的層次與緊密程度,通常可以劃分為鬆耦合(Loose Coupling)、緊耦合(Tight Coupling)和深耦合(Deep Coupling / Ultra-Tight Coupling)三個主要級別。
鬆耦合 (Loose Coupling)
- 原理: GNSS接收機和IMU各自獨立解算,輸出位置、速度等資訊,再由中央融合濾波器(通常是卡爾曼濾波器)進行加權融合。
- 優點: 演算法相對簡單,模組化程度高。
- 缺點: 資訊損失較多;GNSS衛星數少於4顆或輸出品質差時,融合系統無法從GNSS獲得校正,完全依賴IMU推算,誤差迅速累積。
緊耦合 (Tight Coupling)
- 原理: 直接使用GNSS的偽距/偽距率、載波相位/都卜勒等原始觀測量,與IMU預測的觀測量進行比較,差值(新息)送入中央卡爾曼濾波器,統一估計PNT狀態及IMU感測器誤差。
- 優點: 即使GNSS衛星數少於4顆(但至少1顆有效),仍能利用有限資訊校正IMU,提升弱訊號下的定位能力;更易於故障檢測與排除(FDE);IMU誤差估計更精確。
- 挑戰: 演算法複雜度高於鬆耦合,需更緊密的系統整合,對GNSS接收機輸出原始數據有要求。
深耦合 (Deep Coupling / Ultra-Tight Coupling)
- 原理: IMU資訊直接輔助GNSS接收機最底層的訊號擷取和追蹤環路(PLL/DLL)。IMU預測的都卜勒和碼相位可縮小搜尋範圍,提升追蹤靈敏度和抗干擾能力。融合甚至可在I/Q相關值層面操作。
- 優點: 在極微弱訊號、極高動態或極強干擾環境下性能最優;顯著提升抗干擾能力。
- 挑戰: 演算法最複雜;需GNSS接收機底層開放介面(通常需SDR或專用ASIC);對處理能力和即時性要求嚴苛。
駕馭動態:車輛運動學與動力學模型的角色
在GNSS+IMU緊/深耦合的基礎上,引入車輛自身的運動學與動力學模型,能夠為融合定位系統提供更豐富的約束條件,進一步提升在GNSS訊號不良或缺失環境下的定位性能。
車輛運動學模型:描繪運動的幾何軌跡
車輛運動學模型描述車輛的幾何運動,而不考慮力,常用的有恆定速度(CV)、恆定加速度(CA)、恆定轉彎率和速度(CTRV)等模型。在GNSS+IMU耦合中,運動學模型主要應用於狀態預測和非完整性約束(NHC)。NHC假設地面車輛無側滑和垂向跳動,能有效抑制IMU在這些方向的誤差累積,對航向角估計尤為重要。
車輛動力學模型:洞察運動背後的力學機制
車輛動力學模型則考慮作用力與運動狀態的關係,從簡易的點質量模型、自行車模型到複雜的三維多體動力學模型,能更精確描述車輛在加速、制動、轉向等操作下的行為,精密的動力學模型能為GNSS+IMU融合提供更強約束,輔助IMU誤差估計,並增強對異常GNSS觀測量的識別能力,然而,其挑戰在於模型參數的精確獲取與即時計算的複雜性。
整合車輛模型的核心增益包括:顯著提升GNSS中斷時的航位推算精度與時長、加速IMU誤差的收斂與估計、增強對GNSS異常觀測的辨識能力,並能與輪速計、方向盤轉角等其他車載感測器進行更深層次的協同融合。
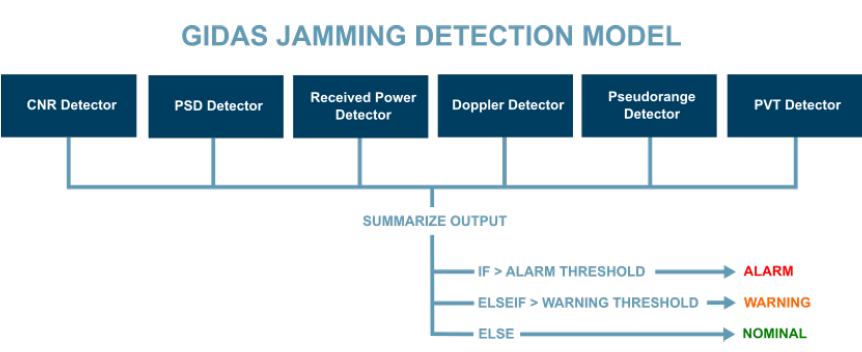
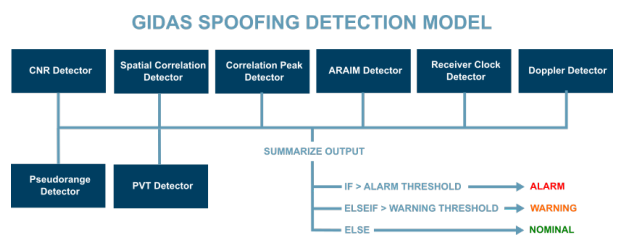
自動駕駛車輛在真實環境中,其賴以定位的GNSS訊號可能遭受干擾(Interference)或欺騙(Spoofing)攻擊,這使得基於GNSS與IMU的感測器融合、車輛模型輔助及強韌性設計至關重要。
工程驗證的關鍵:GNSS+IMU耦合系統的模擬與測試
將GNSS、IMU以及車輛模型整合進一個複雜的定位系統,其演算法的複雜性和對系統即時性的要求,使得全面而嚴苛的測試驗證成為研發流程中不可或缺的一環。高傳真的模擬環境,允許工程師在受控條件下,安全、高效、可重複地評估系統性能,並對演算法進行迭代優化。
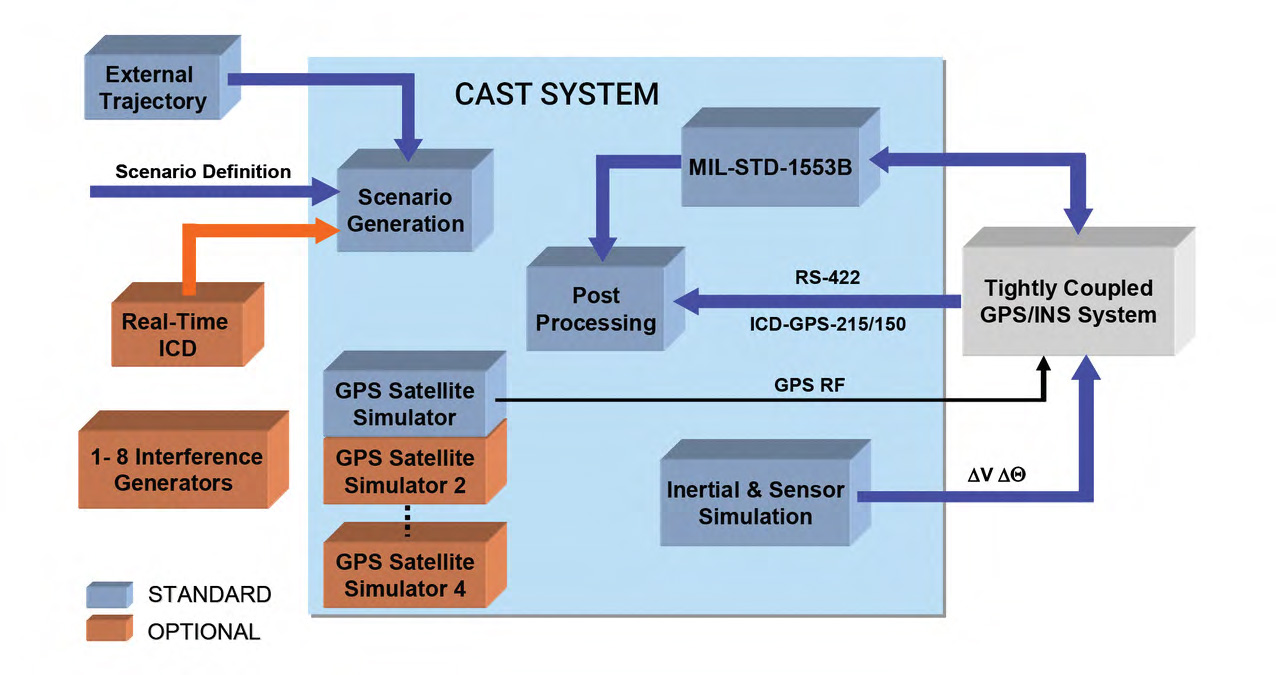
典型的GNSS+INS緊耦合系統硬體迴路(HIL)測試平台架構示意圖,其中GNSS衛星訊號模擬器(例如圖中的GPS Satellite Simulator,或可由OHB XPLORA Pro等設備實現)與慣性及其他感測器模擬協同工作,為待測的緊耦合GPS/INS系統提供全面的測試輸入,甚至可以整合干擾產生器以評估抗干擾性能;GNSS-INS即時模擬平台 這類解決方案,正是為滿足此類複雜整合測試需求而設計,它們能夠協調GNSS訊號模擬與IMU/車輛運動的即時同步。
在GNSS訊號模擬方面,OHB XPLORA Pro 以其即時多星座、多頻段訊號模擬能力和靈活的軌跡與環境參數配置,能夠精確再現車輛行駛中的GNSS接收條件。對於演算法早期開發和模組級測試,OHB XPLORA One 則提供了高性價比的解決方案,其支援的真實環境模擬(如多路徑、大氣延遲)和可選的干擾訊號產生,有助於工程師初步評估車輛模型在不同GNSS品質下的輔助效果。其焦點規格如支援所有主流GNSS星座、高精度GPSDO參考時鐘(±50 ns RMS vs UTC)、以及可由COTS筆記型電腦便捷操作的特性,使其非常適合研發實驗室的快速部署與迭代測試。

OHB XPLORA One GNSS模擬器,以其緊湊的設計和全面的基礎模擬功能(如高達25MHz或選配USRP X300達2x100MHz的模擬頻寬),為GNSS+IMU耦合演算法(含車輛模型)的開發與驗證提供了便捷的工具。
極致逼真:高階駕駛模擬器的整合應用
為追求極致的模擬逼真度,特別是在需要評估駕駛員反應、人機交互界面(HMI)設計,或進行精細車輛動態調校的場景(如自動駕駛系統在極限操控下的PNT性能),更先進的駕駛模擬器應運而生。這類模擬器,例如 VHT 高階駕駛研究模擬器,將六自由度(6DOF)運動平台安裝於可大幅擴展線性位移的XY電動驅動軌道系統之上。其核心優勢在於能夠提供遠超傳統6DOF平台的X軸(縱向加速)與Y軸(橫向加速)運動範圍,實現對持續線性加速度的精確提示,這對於模擬真實駕駛感受至關重要。
這些高階運動系統的承載能力極高(可達1000公斤至6000公斤),足以搭載真實的車輛駕駛艙甚至整個車殼,配合大型視覺穹頂或地面固定式視覺系統,為駕駛員或測試工程師提供高度沉浸式的模擬環境;其平穩且靜音的運行特性,進一步提升了模擬的真實感。領先的汽車製造商,如雷諾(Renault),已投資於此類先進模擬系統(如其ROADS - Renault Optimization Autonomous Driving Simulator),用於開發全新的自動駕駛解決方案,並進行有效測試以確保技術的可靠性與安全性。

領先汽車製造商如雷諾(Renault)已投資於如ROADS (Renault Optimization Autonomous Driving Simulator) 這樣基於 VHT高階駕駛研究模擬器 的先進系統,透過其擴展的XY軌道與六自由度運動平台,對全新自動駕駛解決方案進行高傳真度測試與驗證。
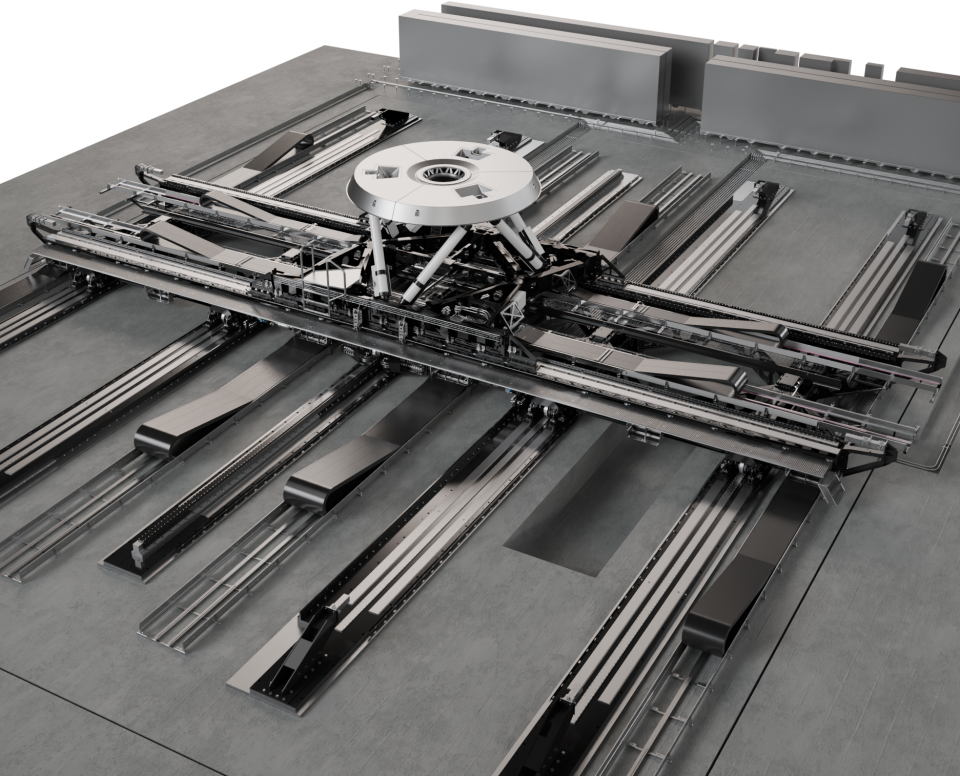
VHT高階駕駛模擬器 的核心XY電動驅動軌道系統,結合六自由度平台,能為高達6000kg的負載(如真實車輛駕駛艙)提供大範圍的縱向與橫向線性加速度提示,實現極高的模擬逼真度。
當這些大型運動平台與高傳真GNSS訊號模擬器(如OHB XPLORA Pro)以及IMU模擬(硬體或軟體)精確同步時,便構成了目前最全面的GNSS+IMU+車輛模型聯合測試環境。IMU能體驗到高度真實的動態激勵,同時GNSS接收機能接收到與此動態完全匹配的RF訊號,使得工程師能夠極為細緻地評估其融合演算法在各種複雜、高動態駕駛情境下的性能極限、穩定性以及對車輛模型參數的敏感度。

多種配置的 VHT高階駕駛模擬器,從適用於地面固定式視覺系統到搭載大型視覺穹頂,均可全方位客製化,滿足從自動駕駛演算法開發到精細車輛動態研究的各種高負載(1000kg至6000kg)測試需求。
精密的IMU誤差模擬,將IMU真值疊加各種誤差模型,是驗證車輛模型對IMU漂移抑制效果的關鍵。同時,考慮到真實訊號傳播的複雜性,如ACE9600 先進通道模擬器可用於模擬都市峽谷等環境下的多徑衰落特性。
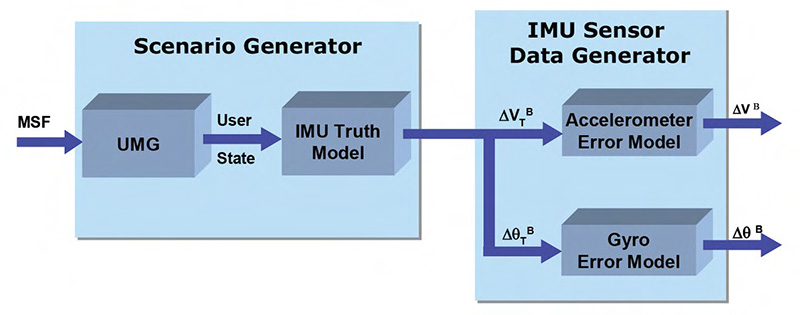
高傳真IMU模擬是GNSS+IMU耦合測試的關鍵環節,場景產生器提供真實運動狀態(User State),經過IMU真值模型(IMU Truth Model)後,再疊加加速度計誤差模型(Accelerometer Error Model)與陀螺儀誤差模型(Gyro Error Model),最終產生帶有真實感測器特性的IMU數據,用於驅動或驗證融合演算法。
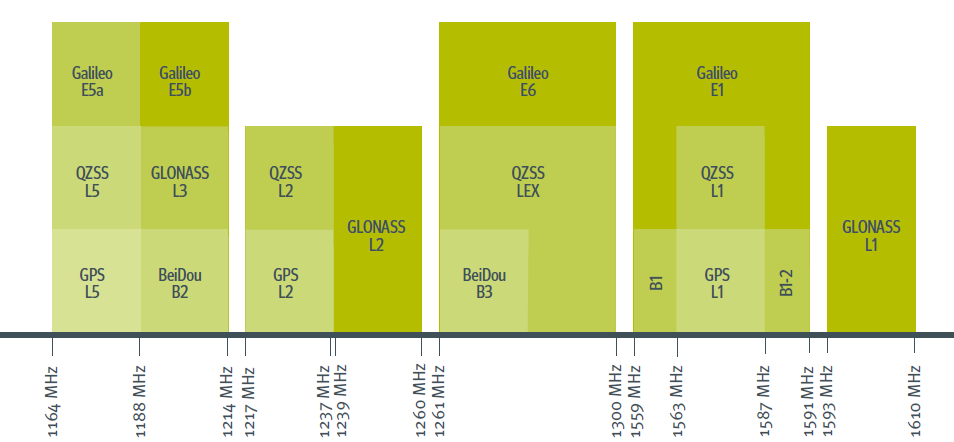
GNSS+IMU耦合系統中的GNSS部分需處理來自多個星座、多個頻段的複雜訊號(如圖所示的GPS L1/L2/L5, GLONASS L1/L2/L3, Galileo E1/E5a/E5b/E6, BeiDou B1/B2/B3等),模擬器需要能準確再現這些訊號特性,而耦合演算法也需能有效融合這些多樣化的觀測數據。
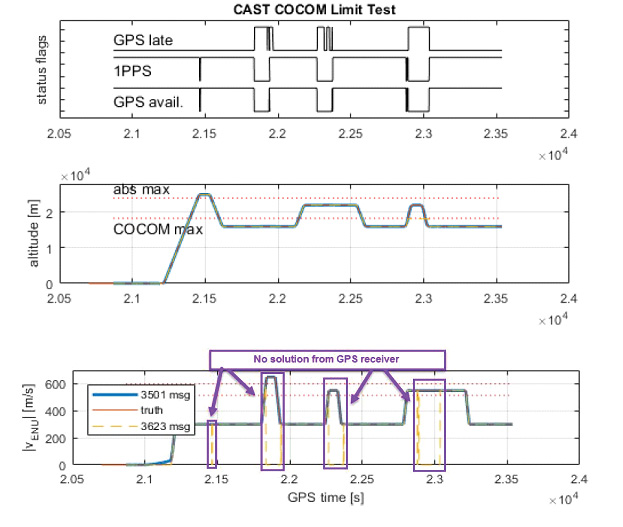
在GNSS訊號輸出中斷的時段(如圖中紫色框標示的“No solution from GPS receiver”區域),傳統的純IMU積分誤差會迅速累積,若GNSS+IMU耦合系統中整合了有效的車輛運動學/動力學模型約束,則能在這些GNSS失效的間隙內,提供更為平滑和準確的航位推算結果,維持定位的連續性。
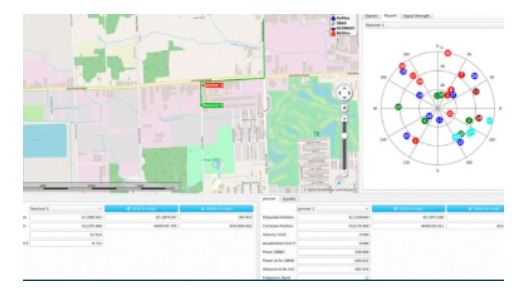
透過OHB XPLORA One的XPLORA Core軟體操作介面示意,工程師可透過地圖定義車輛行駛軌跡(左側面板),並即時監控模擬的衛星星空圖(右上角Skyplot,顯示不同星座衛星)及接收機狀態(下方Position/Velocity/Time等資訊),以進行GNSS+IMU耦合演算法的開發與驗證。
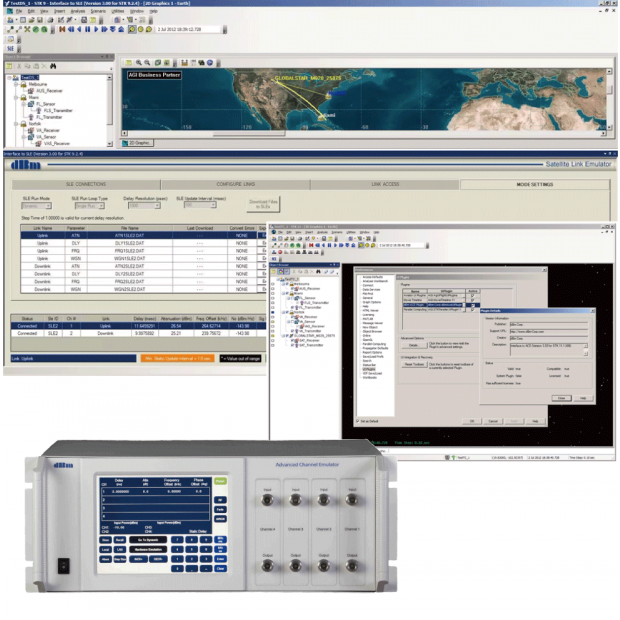
為更精確模擬GNSS訊號在複雜環境(如都市峽谷、室內)中的傳播特性(多路徑、衰減、相位變化等),可採用如DBM ACE9600 先進通道模擬器(硬體如圖下方所示,軟體介面如圖上方所示)等專業設備,對GNSS模擬器輸出的RF訊號進行處理後再送入待測系統。
不同耦合等級的性能比較與應用考量
|
特性比較 |
鬆耦合 |
緊耦合 |
深耦合 |
|
融合層級 |
位置/速度域 |
原始觀測量層級(偽距、載波相位等) |
訊號追蹤環路/I&Q相關值層級 |
|
GNSS最少衛星需求 |
通常4顆 |
1至3顆仍可輔助 |
1顆星的微弱訊號亦可能追蹤 |
|
弱訊號/遮蔽環境性能 |
差 |
較好 |
最佳 |
|
抗干擾/欺騙能力 |
弱 |
中等 |
強 |
|
演算法複雜度 |
低 |
中 |
高 |
|
系統整合要求 |
低 |
中 |
高(需開放GNSS接收機底層介面) |
|
典型應用 |
消費級導航、早期ADAS |
中高階ADAS、無人機 |
極端挑戰環境、軍用、未來高階自駕 |
未來趨勢:AI、LEO PNT與感測器深度融合的展望
GNSS+IMU耦合及車輛模型輔助技術仍在不斷發展:
- AI驅動的自適應車輛模型: 利用AI技術,讓車輛即時學習自身動態特性並自適應調整模型參數。
- 與高精度地圖和環境感知的深度融合: 動態優化運動預測和約束。
- LEO PNT星座的融入: 為GNSS+IMU融合帶來新的機遇與挑戰。
- 與視覺、光學雷達等更多感測器的超緊密融合(X-in-the-loop): 實現全場景、全天候的無縫高精度定位。
- 車規級高性能MEMS IMU的進步: 進一步提升耦合系統的性價比。
結論:車輛模型 – 賦予自動駕駛定位系統更強韌的「骨骼」
在追求更高精度、更高可靠性的自動駕駛定位之路上,單純依賴GNSS+IMU的傳統融合已逐漸觸及其性能天花板,引入車輛運動學與動力學模型,相當於為PNT系統裝上了更強韌的「骨骼」,使其能夠更深刻地理解並預測自身在物理世界中的運動規律。這不僅能在GNSS訊號受限時提供更穩健的航位推算,更能提升對IMU誤差的辨識與補償能力,並增強對異常GNSS觀測量的抵抗力;儘管精確的車輛建模與即時求解仍面臨挑戰,但其帶來的性能增益對於實現全場景L4/L5級自動駕駛至關重要。對於研發工程師而言,掌握這些模型的原理,並結合如OHB XPLORA系列GNSS模擬器、GNSS-INS即時模擬平台、VHT 高階駕駛研究模擬器及運動平台等先進測試工具進行充分的設計迭代與驗證,將是打造下一代高性能自動駕駛PNT系統的核心競爭力。
想了解OHB XPLORA Pro如何與您的車輛動力學模型協同,進行高傳真的HIL測試,或是 GNSS-INS即時模擬平台及VHT 高階駕駛研究模擬器如何為您的自動駕駛定位系統提供全面的驗證環境?立即聯繫OHB技術專家,獲取針對性的解決方案與技術支援。
探索更多關於OHB所有產品在先進駕駛輔助系統(ADAS)和自動駕駛PNT解決方案中的應用。