
現代戰場的幽靈:從烏克蘭無人機戰術看國防模擬訓練的技術革新與未來應用
俄烏衝突的持續,如同一面高倍率放大鏡,將現代戰爭中無人機的戰術價值與技術潛力展露無遺,從早期零星的偵察與校射,到如今大規模、體系化的滲透攻擊與反制對抗,「無人化」與「智能化」已不再是未來概念,而是血與火交織的戰場現實;烏克蘭戰場上,「蜘蛛網」式無人機行動的成功,不僅對傳統防禦理念構成衝擊,更對軍事訓練的模式與深度提出了前所未有的要求,本文將在原有基礎上,進一步深掘無人機攻防的技術細節、戰術變革,以及高階模擬訓練系統如何在這一輪技術革新中,扮演不可或缺的賦能角色。
解密無人機威脅:攻擊學說的演進與關鍵賦能技術
無人機之所以能在現代戰場上迅速崛起,成為改變遊戲規則的「幽靈」,其背後是多種賦能技術的融合與攻擊學說的持續創新。
先進情監偵(ISR)與精確打擊一體化:戰場的「全視之眼」與「手術刀」
現代攻擊型或察打一體無人機,已遠非昔日僅能掛載簡易攝影機的航模可比,以具備長航時與多功能酬載能力的 Quantum3D QUAV 雲下自主 VTOL 無人機 為例,其設計理念便體現了這一趨勢。
- 高解析度光電/紅外(EO/IR)感測套件:
通常包含高清可見光攝影機、製冷型中/長波紅外熱像儀,具備優異的日夜全天候偵察能力,部分先進系統更整合雷射測距/標定功能,可直接為後續火力打擊提供精確目標指示。 - 訊號情報(SIGINT)與電子情報(ELINT)酬載潛力:
特定任務模組可使其具備監聽敵方通訊、定位雷達輻射源等能力,為電子戰與情報優勢提供支持。 - 高速數據鏈與雲端AI輔助:
實時回傳的高清影像與感測數據,可透過地面控制站或雲端AI進行快速分析,實現目標自動識別(ATR)、行為異常檢測與戰鬥毀傷評估(BDA),大幅縮短「觀察-判斷-決策-行動」(OODA)循環。 - 協同作戰:
可模組化架構以整合不同的載荷(payload),並擁有眾多卓越特性,使其能夠與所有無人系統協同作戰。
這種ISR與打擊能力的高度整合,使得無人機能夠在戰場上扮演「遊獵者」的角色,長時間滯空監視,一旦發現高價值目標(如指揮所、炮兵陣地、雷達站),即可迅速發動精確打擊或引導其他火力單元。
滲透的藝術:多維手段突破一體化防空系統
面對日益嚴密的一體化防空系統(IADS),無人機的滲透策略也更趨複雜與多樣化。
- 低可偵測性(Low Observable, LO)技術應用:
雖然成本考量使多數無人機難以達到第五代戰機的隱形標準,但透過複合材料的應用、機體外型的雷達截面積(RCS)優化設計、紅外抑制塗層等手段,仍在一定程度上降低了被主流防空雷達與紅外感測器偵測的距離與機率。 - 精細化航路規劃與戰術運用:
- 地形遮蔽與氣象利用:
利用山谷、丘陵、城市建築群進行超低空飛行,規避雷達掃描死角;選擇在夜間、惡劣天候或複雜電磁背景下行動,增加防禦方早期預警難度。 - 「誘餌」與「狼群」配合:
可能使用少量廉價無人機作為誘餌,吸引或消耗防空火力,掩護主力突防。
- 地形遮蔽與氣象利用:
- 電子戰(EW)能力的整合:
- 自衛性電子干擾:
部分無人機可能搭載小型自衛干擾吊艙,對特定威脅雷達或導引頭進行窄頻瞄準式干擾。 - 伴隨式電子壓制:
由專用電子戰無人機進行區域性防空雷達壓制或通訊干擾,為攻擊機群開闢「電磁走廊」。 - 反輻射攻擊:
利用反輻射導引頭的無人機,自主搜索並攻擊敵方雷達等輻射源。
- 自衛性電子干擾:
- 網路中心戰與網路攻擊:
透過侵入敵方指揮控制網路、癱瘓數據鏈路等網路手段,間接削弱其防空系統的反應能力,為無人機滲透創造條件。
「蜂群」的智慧:從數量飽和到自主協同的質變
無人機「蜂群」作戰已從概念走向初步實戰驗證,其核心思想是利用大量(數十至數百架)低成本、具備一定自主協同能力的無人機,透過分布式智能與任務協調,實現超越單體能力的作戰效果。
- 分散式控制與彈性自組織:
蜂群不再依賴單一的中心控制節點,各無人機間可透過高速、抗干擾的自組網路(Ad-hoc Network)進行訊息共享與任務協調,當部分個體失效或受損時,蜂群能自主重新分配任務、調整隊形,保持整體作戰效能。 - AI驅動的自主行為:
基於強化學習等AI算法,蜂群中的無人機能夠根據戰場環境的實時變化(如新出現的威脅、己方損失情況)動態調整戰術,展現出一定的「戰場學習」能力。 - 多功能異構編成:
蜂群內部可能包含執行不同任務的異構平台,如偵察監視型、電子干擾型、火力打擊型、通訊中繼型等,根據預設的作戰條令(Doctrine)或實時指令進行高效協同。 - 跨域協同潛力:
未來的蜂群作戰很可能擴展至空中、地面(如與BARKAN UGV 無人地面車 這類自主地面平台協同)、海面乃至水下等多個作戰域,BARKAN UGV的模組化設計和蜂群架構使其能夠作為地面節點,為空中蜂群提供前進部署、補給、或火力支援。

BARKAN 無人地面載具(UGV)具備自主導航、7.62mm 武器系統、遠端控制與蜂群作戰能力,適用於偵察、監視、運輸及武裝任務,提升作戰效能並降低風險。
模擬的熔爐:在虛擬戰場錘鍊未來戰力
面對無人機威脅的複雜性與戰術的快速演進,傳統訓練手段在成本、安全、場景逼真度和可重複性等方面均面臨巨大瓶頸;高階模擬訓練系統,特別是那些能夠整合VR/AR、高精度物理引擎、智能化CGF(Computer-Generated Forces,電腦生成兵力)的平台,成為彌補這一差距的關鍵。
個體技能的極致打磨:VR/MR帶來的沉浸式革命
對於單兵操作的武器系統或複雜平台,VR/MR技術提供了前所未有的訓練真實感與操作體驗。
Quantum3D 刺針飛彈模擬器(Stinger Simulator)
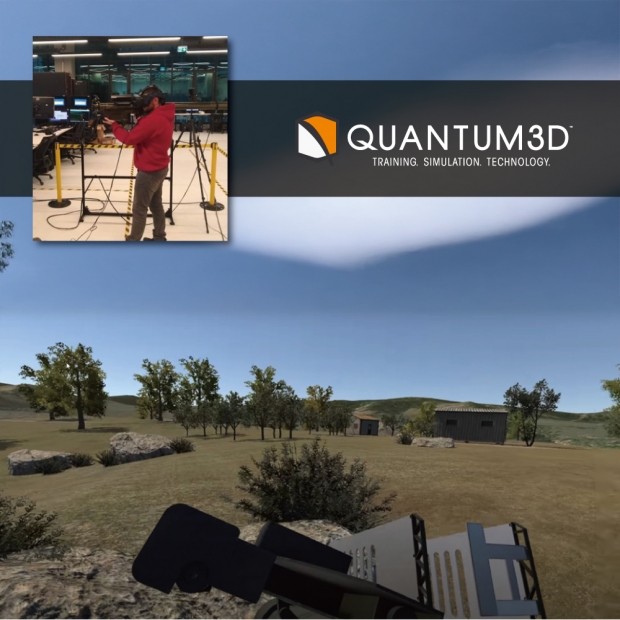
Quantum3D 刺針飛彈模擬器(Stinger Simulator)是一款 VR高擬真訓練系統,支援個人與團隊訓練,提供環境設定、敵我識別、規避動作等功能,並內建訓後回顧與教官操作站,全面提升訓練效能。
-
- VR視覺渲染與延遲控制:
為了有效捕捉高速空中目標,高品質的VR系統致力於實現極低的畫面延遲和高刷新率。這些特性,配合廣闊的視場角(FOV)和高解析度顯示,是避免暈動症、提供清晰目標圖像、並確保訓練真實感的關鍵技術因素。對於刺針飛彈這類需要精確瞄準高速移動目標的模擬訓練,優良的VR視覺系統能顯著提升訓練效果和操作者的戰場適應能力。 - 高精度物理與氣動模型:
刺針導彈的飛行軌跡不僅受初始發射參數影響,還受到大氣密度、風速風向、重力、彈體氣動特性等多種因素影響,模擬器內建的物理引擎需能精確實時解算這些因素,並模擬紅外導引頭對目標熱訊號的追蹤邏輯,以及對敵方熱焰彈(Flare)等反制措施的識別與規避算法。 - IFF與目視識別(VID)的綜合訓練:
在複雜空情下,準確進行敵我識別是避免誤擊的關鍵,模擬器不僅模擬IFF應答器的訊號特徵,更強調在IFF失效或受干擾時,操作員依賴目視進行目標外形、飛行姿態、戰術動作等特徵識別的能力。 - 精細化的AAR數據維度:
除了基本的命中/脫靶,AAR系統還應記錄目標進入/脫離有效射程時間、操作員搜索/鎖定耗時、瞄準點與實際彈着點的偏差分析、面對不同干擾下的決策樹等,為精準評估和改進提供數據支撐。
- VR視覺渲染與延遲控制:
Quantum3D 無人機模擬器(UAV Simulator)

無人機模擬器(UAV Simulator)專為飛行員、操作員及指揮官設計,提供專業訓練,具備通用空氣動力學模擬、感測器整合、攝影機模擬、及全球地形適應能力,可模擬各種任務場景並與其他訓練系統連接,適用於獨立或團隊訓練。
-
- 空氣動力學模型的保真度:根據無人機的翼型、重量、推力等參數,建立準確的氣動模型,模擬其在不同飛行姿態、速度、高度下的操縱響應、穩定性及失速等極端情況。這可能涉及查表法(Lookup Tables)與基於計算流體力學(CFD)簡化模型的混合應用。
- 感測器環境互動模擬:
- EO/IR感測器:
一套完整且高效率的訓練模擬,通常會致力於精細呈現這些感測器的真實作戰效能。這包括不僅模擬基礎的光學參數如焦距、視場角(FOV)、解析度,更重要的是模擬複雜環境因素對成像的影響:例如,不同天候條件(雲、霧、霾、降水)對可見光與紅外光譜的衰減效應;日夜晨昏的光照變化與陰影對目標可見度的影響;目標(如車輛、人員、偽裝物)與背景之間的熱對比度變化,以及在特定條件下可能出現的「熱交叉」現象(目標與背景溫度趨同導致難以分辨)。此外,高品質的模擬還會考慮不同目標材質的紅外輻射與反射特性,以及感測器自身的噪聲與偽影,這些都是直接影響操作員進行有效目標偵測、追蹤、識別(DTIR)與影像判讀能力的關鍵。 - 雷達感測器(若有):模擬雷達波束的掃描模式、脈衝重複頻率(PRF)、地面/海面雜波、多普勒效應、電子反制(ECCM)能力等。
- 感測器雲台(Gimbal)動態與操作限制模擬:
為確保訓練的真實性,模擬器通常需要細緻模擬感測器雲台的機械與控制限制,例如其最大旋轉/俯仰角度與速率、穩定精度(對抗載機振動與機動的能力)、以及目標自動追蹤模式下的性能邊界(如最大可追蹤角速度)。讓操作員在訓練中充分理解並適應這些限制,對於在實戰中高效運用感測器至關重要。
- EO/IR感測器:
- 任務酬載與應急程序模擬:
模擬不同任務酬載(如偵察吊艙、電子戰吊艙、小型武器)的操作流程、數據回傳,以及在遭遇通訊中斷、GPS丟失、動力故障等緊急情況下的應急處置程序。
多域聯合作戰的虛擬指揮所:合成環境下的集體智慧演練
現代戰爭是體系對抗,單一平台的優勢只有融入聯合作戰體系才能充分發揮,Tactical FIVE(Forces In Virtual Environment)戰術環境模擬系統 旨在提供一個高擬真、可擴展、可互操作的合成戰術環境。
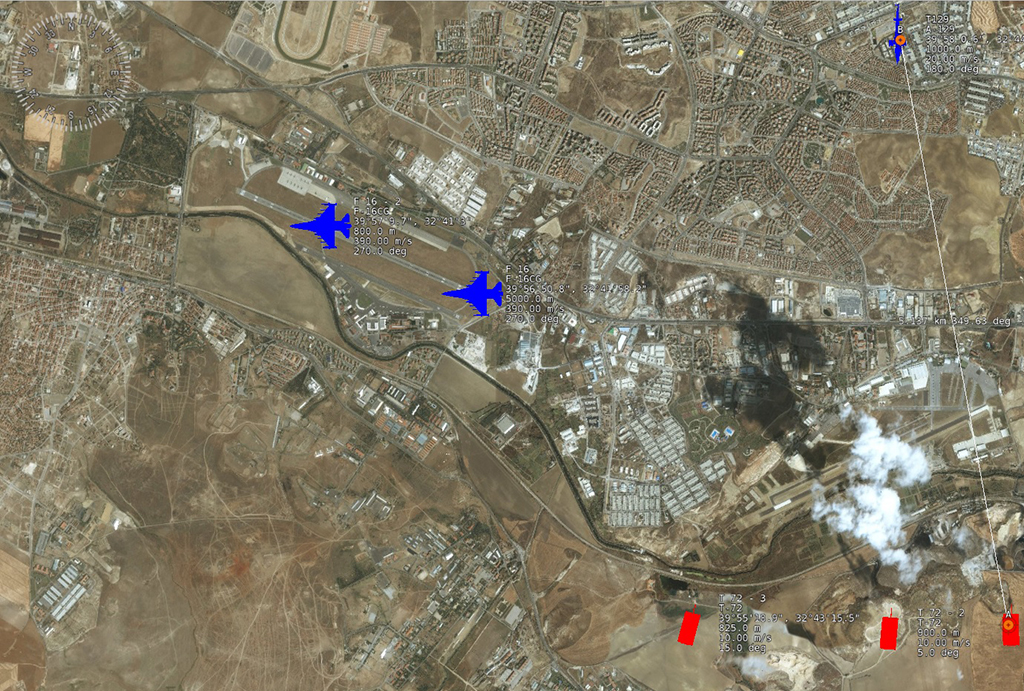
Tactical FIVE系統中,基於CDB標準的高精度3D戰術環境,可見地形起伏、植被分布及作戰單位的精確部署,圖中標示的作戰單位可能代表由AI控制的CGF,或由其他聯網模擬器(如VR座艙)操控的虛擬實體,共同參與複雜的戰術互動。
- CGF/AI引擎的深度:
- 行為樹與有限狀態機:
用於定義實體(如敵方無人機、地面部隊)的基礎戰術行為邏輯,使其能根據預設條令或戰場態勢觸發特定動作(如巡邏、警戒、接敵、撤退)。 - 路徑規劃與避障算法:
確保CGF實體能在複雜地形中智能規劃行動路徑,並規避障礙物或其他單位。 - 感知與決策模型:
模擬實體的「感知-思考-行動」循環,使其能「看見」戰場環境、「理解」威脅與機遇,並做出相對合理的戰術決策,更高階的AI甚至可以引入機器學習,使CGF在對抗演練中不斷「進化」其戰術。
- 行為樹與有限狀態機:
- HLA/DIS互操作性詳解:
- 聯邦執行委員會(RTI):
在HLA架構中,RTI負責管理不同模擬器(聯邦成員)之間的數據交換和時間同步。 - 對象模型模板(OMT):
定義了聯邦中共享的實體屬性(如位置、速度、姿態、武器狀態)和交互(如開火、爆炸、通訊)的標準格式,確保不同開發商的模擬器能「理解」彼此的數據。 - 數據分發管理(DDM):優化數據在聯邦成員間的分發,避免不必要的網絡負載,確保大規模模擬的實時性。
- 透過這些機制,一個支援HLA/DIS標準的模擬器(例如,Quantum3D 無人機模擬器的操作員發射的虛擬彈藥,其飛行軌跡和打擊效果),或者在一個具備標準化網路接口的刺針飛彈模擬器中(若其設計用於與如Tactical FIVE這樣的外部HLA聯邦整合),操作員在VR中發射的導彈,其關鍵的飛行軌跡參數和命中/脫靶等交互事件,便可以透過RTI(在HLA架構下)實時地作為標準化的對象屬性更新或交互事件,傳輸到Tactical FIVE的全局態勢中;相應地,Tactical FIVE中的其他CGF單位或聯網的其他類型模擬器(如指揮所模擬器、其他火力單元模擬器)便能根據預先定義的對象模型(如RPR FOM)來『理解』並響應這些數據和事件,從而實現逼真的多方聯合作戰演練。
- 聯邦執行委員會(RTI):
- 高精度地理空間資料庫(Geospatial Database)的重要性:
- 通用數據庫(CDB)標準:
CDB是一種開放的、標準化的地理空間數據存儲格式,能夠整合衛星影像、高程數據、地表特徵(植被、建築物、道路)、氣象數據等多源訊息,為所有聯網模擬器提供統一、高精度的虛擬戰場環境。 - 動態環境效果:
模擬實時變化的天氣(風、雨、雪、雲量、能見度)、日夜循環、光照與陰影,這些都直接影響感測器的性能和人員的戰術決策。
- 通用數據庫(CDB)標準:
- 複雜想定編輯與推演能力:
Tactical FIVE應提供強大的想定編輯工具,允許用戶不僅放置兵力,還能編寫複雜的事件觸發腳本、設置不同階段的作戰目標、注入隨機因素,以進行多方案的戰術推演和效能評估(MOE/MOP)。
地面維度的延伸:自主載具在未來戰場的角色與模擬挑戰
無人化趨勢同樣席捲地面作戰領域,以BARKAN UGV 無人地面車 為代表的自主地面載具,在降低人員傷亡、執行高危任務、提升作戰效能方面潛力巨大。
- 自主導航與環境感知技術:
- 多感測器融合:
整合光學雷達(LiDAR)、毫米波雷達、立體視覺攝影機、慣性導航系統(INS)以及全球導航衛星系統(GNSS),透過Kalman濾波等算法進行數據融合,實現全天候、多場景下的精確定位與環境感知。 - 即時定位與地圖構建(SLAM):
在GPS訊號受擾或拒止的環境下,UGV能利用SLAM技術自主構建周圍環境地圖並進行自我定位。
- 多感測器融合:
- 人機協同與蜂群控制:
- 多層級控制架構:
允許操作員在不同自主等級間切換,從遠程遙控、路徑點導航到完全自主執行任務(如自主巡邏、目標跟隨)。 - UGV-UAV協同:
UGV可作為空中無人機的前進部署平台、地面數據中繼站或協同感知節點;例如,UAV在高空偵察發現目標,引導地面UGV前往近距離確認或處置。 - 模擬此類複雜的人機交互與跨域協同,對訓練平台(如Tactical FIVE)的CGF AI邏輯和通訊模擬能力提出了更高要求。
- 多層級控制架構:
- 模組化酬載的戰術靈活性:
BARKAN的模組化設計允許其根據任務需求快速更換不同的任務酬載,如偵察監視套件(含高倍率變焦鏡頭、夜視設備)、排爆機械臂、火力武器站(受限於法規)、物資運輸模塊等。模擬訓練需能反映不同酬載的操作特性和戰術應用。
跨越虛實鴻溝:當前模擬的挑戰與未來技術前沿
儘管模擬訓練已取得長足進步,但在追求極致逼真和高效能的道路上,仍面臨諸多挑戰,同時也孕育著巨大的技術突破潛力。
- 「模擬失真」與「負面訓練」的風險:
若模擬器的物理模型、AI行為或人機交互界面不夠精確,可能導致受訓者形成錯誤的肌肉記憶或戰術認知,反而影響實戰表現;持續的驗證、確認與鑑定(VV&A)是確保模擬品質的關鍵。 - 模擬人類複雜因素的難度:
戰場上的恐懼、疲勞、壓力、士氣、以及指揮官的直覺判斷等高度複雜的人類因素,難以完全用數學模型量化和模擬;結合生物反饋感測器(如心率、皮電)、眼動追蹤等技術,並引入認知心理學模型,是未來的探索方向。 - AI在模擬中的雙重角色:
- 智能化對手(Intelligent Adversary):
利用深度強化學習等技術,訓練出能夠執行複雜戰術、具備學習和適應能力的虛擬對手,為受訓者提供更具挑戰性的對抗環境。 - 智能化教官(Intelligent Tutor System, ITS):
AI可以分析受訓者在模擬過程中的表現數據,識別其薄弱環節,並自動調整訓練難度或提供個性化的輔導建議。
- 智能化對手(Intelligent Adversary):
- LVC(Live-Virtual-Constructive)一體化訓練的深化:
將真實的士兵和裝備(Live)、高擬真模擬器(Virtual)、以及電腦生成的兵力(Constructive)無縫融合在統一的、可互操作的訓練環境中,是未來軍事訓練的發展趨勢;這對網路架構、數據標準、時間同步、以及安全性提出了極高要求。 - 元宇宙(Metaverse)概念的軍事化應用:
構建持久化、可擴展、高度沉浸的軍事元宇宙訓練平台,使分散在各地的部隊能夠在共享的虛擬戰場中進行常態化的聯合作戰演練、戰術研討和裝備效能評估。
結論:以深度模擬駕馭複雜未來,決勝無人化戰場
烏克蘭戰場的硝煙遠未散盡,但其揭示的無人化、智能化戰爭趨勢已清晰可見。這場衝突雄辯地證明,未來戰爭的勝負,不僅取決於武器裝備的先進程度,更取決於能否快速適應戰場變化、高效運用新技術、以及培養出能夠駕馭複雜戰場環境的高素質人才。
在這一背景下,以Quantum3D 刺針飛彈模擬器、Tactical FIVE戰術環境模擬系統、Quantum3D 無人機模擬器以及整合了BARKAN UGV等先進自主平台模型的模擬訓練解決方案,其戰略價值日益突顯,它們不再僅僅是節約成本、保障安全的輔助工具,更是洞察戰爭迷霧、孵化創新戰術、加速戰鬥力生成、乃至探索未來戰爭形態的關鍵引擎。唯有持續投入研發,不斷深化模擬技術的應用層次與逼真度,才能在日益複雜和充滿不確定性的未來戰場中,牢牢掌握主動權。