
數位戰場無人地面載具 (UGV) 整合:從遙控到自主導航的驗證挑戰
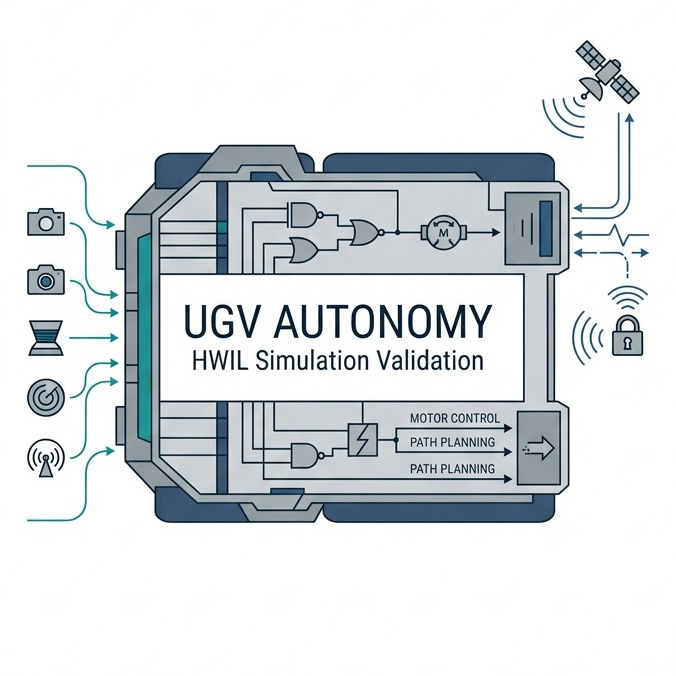
在 2026 年的數位化戰場中,無人地面載具(UGV)的應用已從傳統的靜態偵察,全面擴展至高風險環境下的彈藥運輸、武裝偵察(Armed Reconnaissance)、核生化(CBRN)探測與爆炸物處理(EOD)等複雜任務,為了取代人員在致命熱區執行任務,現代 UGV 高度仰賴多感測器融合(包含高解析度可見光、LWIR 熱成像與 3D 光達)來建構即時的戰場環境態勢;然而從工程驗證的角度來看,將龐大的感測器數據流、基於人工智慧的邊緣運算邏輯,以及超低延遲的戰術通訊鏈路整合至單一地面載具中,對系統的可靠度與容錯能力提出了空前嚴苛的挑戰。
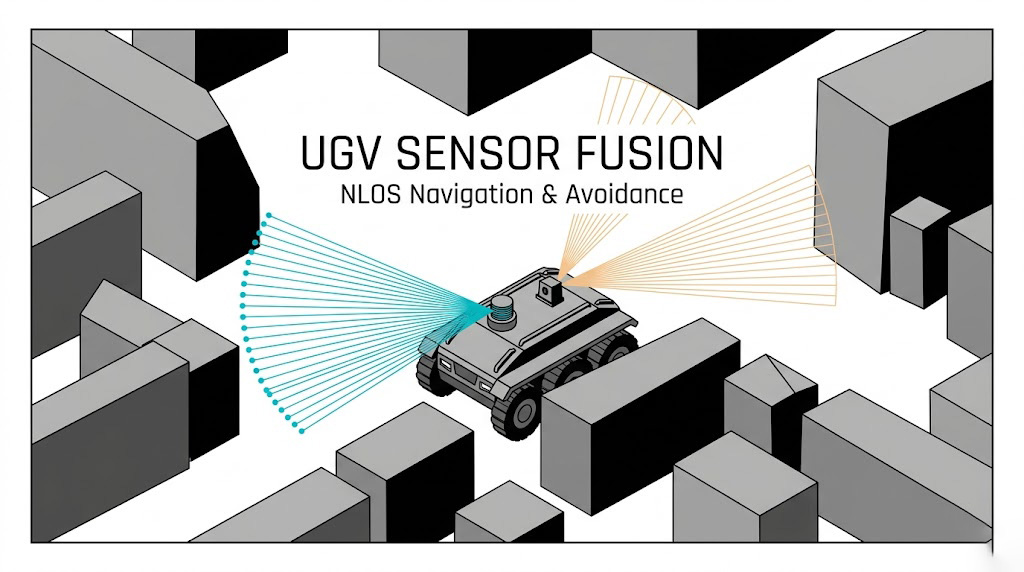
UGV 的運作環境通常充滿了非直視距(NLOS)的物理遮蔽物(如城市廢墟、茂密叢林),且極易面臨敵方的電子干擾(Jamming)與全球導航衛星系統(GNSS)拒止,在這種極端條件下,測試工程師必須確保載具的控制迴路(Control Loop)與資料鏈路(Data Link)能夠在毫秒級的容限內穩定運作,同時還要驗證演算法在極端邊角案例(Corner Cases)下的失效安全(Fail-Safe)機制。這些法規與實務上的測試要求,已遠遠超出傳統戶外實車測試的涵蓋範圍,實務上的三大難題:
複雜地形下的多感測器融合與動態路徑規劃驗證
UGV 在執行 3D 地貌測繪或武裝巡邏時,必須即時處理來自四面八方的感測器數據,以進行可駕駛地形識別(Drivable Terrain Identification)與動態航路選擇(Dynamic Route Selection),工程師面臨的難題在於,實地測試無法安全且可重複地重現所有複雜的戰場障礙物與極端氣候(如濃霧或大雨),若感測器融合演算法在處理大量雜訊時產生誤判,將導致載具碰撞或任務失敗,因此必須在實驗室內透過注入高擬真度數位雙生(Digital Twin)合成場景的硬體在環(HWIL)系統,對 UGV 的視覺與光達處理單元進行海量的蒙地卡羅測試。
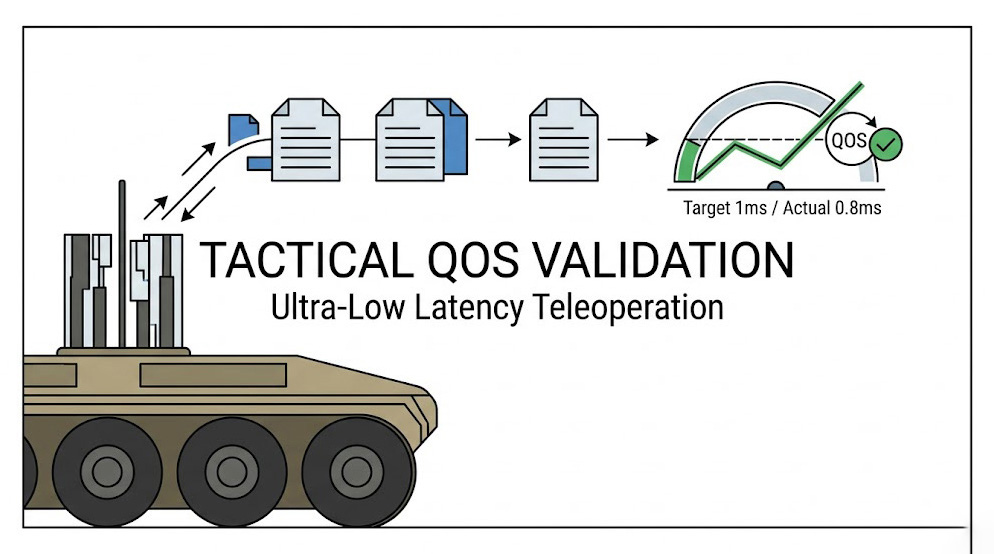
嚴苛戰術網路下的超低延遲與 QoS(服務品質)保證
在進行非自主的遠端遙控作戰(如透過影像操作的遠端遙控或遙控武器站)時,系統對上鏈(Uplink)的指令傳輸與下鏈(Downlink)的即時影像頻寬有著極端的要求,根據最新的軍事 5G 專網標準,要實現 UGV 的順暢控制與即時戰場態勢感知,其來回延遲(Round-trip Latency)必須嚴格控制在 100 毫秒(ms)以內,若為協同 UGV 駕駛(Co-operative UGV Driving)更需低於 60 毫秒,且封包遺失率(Packet Loss Ratio)必須小於 0.0001%;在面臨敵方射頻干擾與頻譜壅塞的動態戰場中,如何精準量測並確保 UDP 串流在變動頻寬下的 QoS 指標不劣化,是通訊與系統整合工程師的一大痛點。
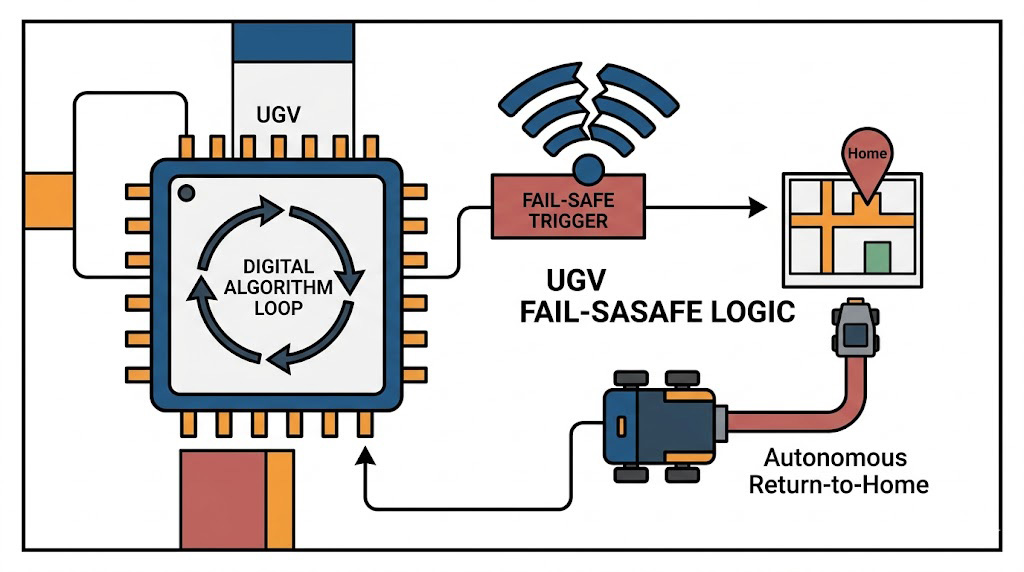
通訊中斷下的失效安全(Fail-Safe)與自主邏輯測試
當 UGV 深入敵後遭遇強烈的電子干擾,導致遙控鏈路與 GNSS 訊號完全中斷時,載具必須具備高度可靠的自主生存邏輯,系統必須能自動切換至無 GPS 獨立任務模式(GPS Standalone Task)、執行領頭車跟隨(Leader Follow-up)或啟動斷線自動返航(Returning Home in Loss of Link)程序,驗證這些基於規則(Rule-based)或機器學習的自主決策演算法,無法僅靠實車試跑,必須將 UGV 的主控電腦介接至高效能的模擬迴路中,針對各種通訊中斷的時機點與地形條件進行反覆的壓力測試,以確保其符合軍規的安全性與任務延續性。
面對上述嚴苛的測試與系統整合挑戰,奧創系統推薦導入 Quantum3D 的 BARKAN 無人地面載具(UGV),並結合其專屬的 MANTIS® 影像產生軟體 與 Independence IDX 模擬平台,我們深知,單純提供載具硬體已無法滿足現代數位戰場的需求;我們的優勢在於,我們不是賣盒子(Box Moving),而是提供「從硬體載具到虛擬模擬驗證的一站式方案 (Turnkey Solution)」。
全球安全威脅的頻率和多樣性日益增加,尤其對陸軍而言更是如此,自主無人地面車輛(UGV)透過遠端操控或感測器系統感知環境,將現代技術融入軍事單位,在數位戰場的要求範圍內,無需人員即可執行偵察、監視和彈藥運輸等基本任務。
針對複雜地形的偵察與多樣化任務需求,BARKAN UGV 提供了卓越的實體平台,它具備模組化架構,最高時速可達 13 km/h,並具備長達 8 小時的電力續航,可彈性整合 7.62mm 武器站、機械手臂(用於 EOD 任務)或 CBRN 探測模組,更重要的是,BARKAN 內建了強大的自主巡邏、障礙物規避、動態路徑選擇以及斷線自動返航等進階自主邏輯,能協助客戶符合現代戰術對於 UGV 獨立作戰能力的規範。
而針對多感測器融合與失效安全(Fail-Safe)的驗證痛點,奧創系統推薦搭配 Quantum3D MANTIS® 軟體與 IDX 影像產生器 進行先期的數位雙生與 HWIL 測試,MANTIS 軟體能基於精確的物理特性,渲染出包含複雜城市地形、3D 體積雲與天候干擾的高解析度合成戰場場景,透過將這些模擬的高擬真可見光與 LWIR 感測器數據即時注入至 BARKAN 的控制電腦中,工程師能大幅提升測試效率,並在無風險的實驗室環境中,反覆驗證 UGV 在斷線或 GNSS 拒止情況下的自主返航與跟隨邏輯,針對 5G 戰術網路的 QoS 測試,這套模擬迴路亦可結合網路損遲模擬設備,真實還原戰場上的封包延遲與遺失情境。
Quantum3D 的 MANTIS 視覺化模擬軟體範例,展示了飛行員視角下的飛機從舊金山國際機場傍晚起飛,並在舊金山地區上空飛行後降落的過程。
專屬訓練環境建置與技術支援
實際的系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同,立即聯繫奧創系統,讓我們協助您找到最適合您實驗室的完美解答。
實際系統配置將因應您的測試應用、規範、場地限制及待測物(如特定武裝模組的整合或通訊鏈路驗證)特性而有所不同,如需深入規劃與系統或軟硬體選配搭配建議(如 BARKAN 載具規格客製化或 IDX 模擬器通道配置),請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。