
無人機城市峽谷導航測試:克服多路徑效應與 NLOS 挑戰
「低空經濟」正從概念走向現實,未來的城市天際線將布滿執行外送、巡檢甚至載人任務的無人機(UAV),然而當飛行場域從開闊的農田轉移到鋼筋水泥叢林時,衛星導航系統(GNSS)面臨了物理學上的終極考驗:城市峽谷(Urban Canyon);在開闊地帶,GPS/GNSS 的定位精度可達公尺級甚至公分級(RTK),但在高樓林立的市中心,定位誤差可能瞬間暴增至數十公尺,對於在建築物間穿梭的無人機而言,5 公尺的誤差就可能意味著撞擊大樓或墜落人群,這不是接收機壞了,而是訊號「迷路」了。

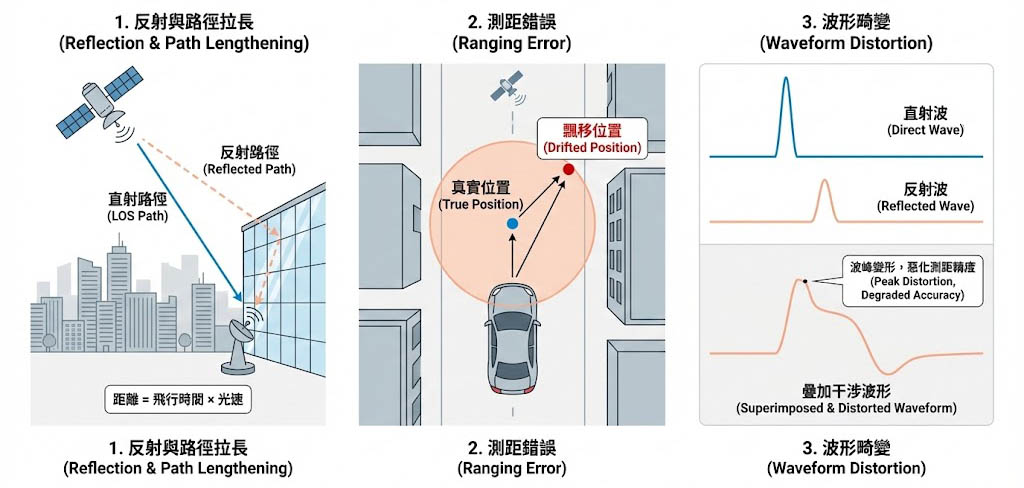
物理殺手一:多路徑效應 (Multipath Effect)
GNSS 定位的基本原理是「測量距離」:訊號以光速飛行,測量飛行時間乘以光速即為距離,這假設訊號是走直線的(視距傳播, LOS)。
- 反射與路徑拉長:
在城市中,直射訊號往往被大樓阻擋,接收機收到的是經過玻璃帷幕或混凝土牆反射後的訊號,這條「反射路徑」比「直射路徑」更長。 - 測距錯誤:
接收機若誤將反射訊號當作直射訊號,計算出的距離就會比實際遠,在幾何解算上,這會導致定位點被「推」向遠離衛星的方向,造成位置飄移。 - 波形畸變:
當直射波與反射波同時到達(例如從地面反射),兩者會疊加干涉,導致相關器(Correlator)追蹤到的波峰變形,進一步惡化測距精度。
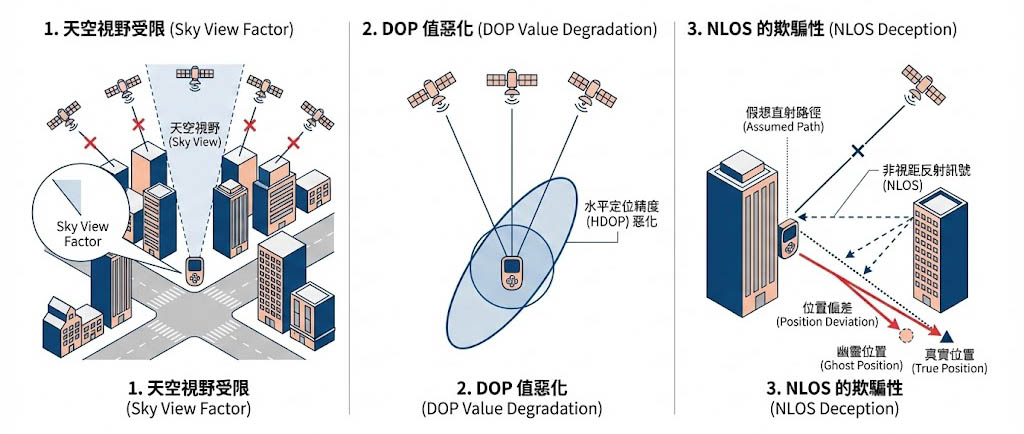
物理殺手二:非視距接收 (NLOS) 與幾何劣化
- 天空視野受限 (Sky View Factor):
站在十字路口,仰望天空可能只剩下一條縫,這意味著大部分的衛星都被大樓遮住了,接收機只能鎖定頭頂少數幾顆衛星。 - DOP 值惡化:
衛星分布幾何(DOP)變差,原本應該分佈在四周的衛星現在全擠在頭頂一直線,這會導致水平定位精度(HDOP)急劇下降。 - NLOS 的欺騙性:
最危險的情況是,直射訊號完全被遮擋,接收機只鎖定到一個強反射訊號(Non-Line-of-Sight),此時接收機「以為」訊號是直的,但其實繞了遠路,這種誤差通常難以透過傳統演算法濾除,是無人機城市導航的最大隱憂。
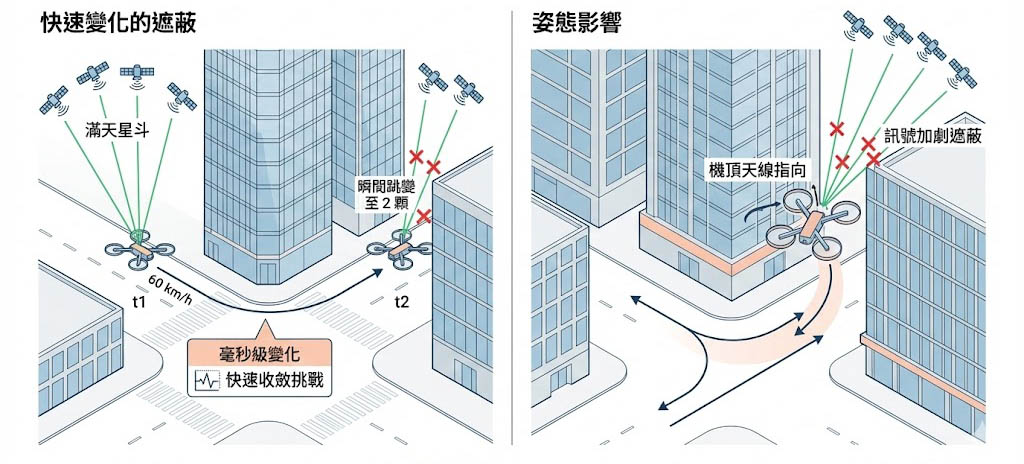
動態環境的挑戰
無人機是高速移動的三維物體。
- 快速變化的遮蔽:
無人機以時速 60 公里飛過街角,衛星的可見性會在毫秒級內發生劇烈變化(從滿天星斗瞬間變成只剩 2 顆),導航濾波器(如卡爾曼濾波)需要極快的收斂速度才能適應這種跳變。 - 姿態影響:
無人機在過彎時會傾斜(Bank),機頂天線可能因此指向大樓而非天空,進一步加劇訊號遮蔽。
要在不摔機的情況下解決上述問題,唯一的途徑是在實驗室中建立一個 「數位雙生(Digital Twin)」的城市電磁環境,您需要的不是簡單的訊號產生器,而是一套能 「匯入 3D 城市地圖」 並進行 「光線追蹤(Ray Tracing)」 運算的模擬系統。
我們推薦 OHB Digital Solutions 的高階衛星模擬器與 Maury Microwave (dBm) 的通道模擬技術,為低空經濟構建了一套完整的虛擬驗證場域。
方案核心:XPLORA Pro 的 3D 城市與多路徑模擬
OHB XPLORA Pro 是專為複雜環境設計的 GNSS 模擬器,它超越了傳統的統計模型,引入了確定性(Deterministic)模擬 能力。
- 匯入 3D 建築模型:
系統支援確定性多路徑與遮蔽模擬。使用者可針對特定場景(如城市峽谷)定義訊號遮蔽狀況,模擬真實且複雜的訊號環境。 - 即時訊號路徑運算:模擬引擎會根據接收機(如無人機)的即時位置,計算每一顆衛星的訊號路徑。
- 遮蔽計算 (Obscuration):
依據使用者定義的遮蔽遮罩 (Obstruction Mask),精確判斷視線是否被阻擋。 - 確定性多路徑:
計算訊號在環境中的反射、衰減與延遲,讓接收機經歷真實的「忽有忽無」訊號環境。


XPLORA Pro 高階 GNSS 訊號模擬解決方案支援產生所有公共 GNSS 訊號與頻率,包含 GPS、Galileo、GLONASS、BeiDou 等,具備即時 RF 播放、數位中頻訊號產生、干擾與欺騙模擬能力,並可模擬接收器的運動、天線特性及導航訊息;靈活的 API 或 GUI 操作介面,實現參數的即時修改,提升干擾應對策略並進行標準化驗證。
通道效應的極致模擬:ACE9600
針對無人機通訊鏈路(C2 Link)或更精細的物理層研究,我們結合 ACE9600 寬頻通道模擬器。
- 12 路徑衰減模型:
對於無法建立精確 3D 模型的通用城市環境,ACE9600 提供了強大的統計模型,它可以模擬多達 12 條獨立的反射路徑(Taps),每條路徑可設定不同的延遲、都卜勒與功率。 - 高動態都卜勒:
無人機的高機動性會帶來顯著的都卜勒頻移,ACE9600 支援高達 ±6.0 MHz 的頻率偏移與高變化率模擬,確保驗證無人機在急加速或旋轉時的訊號鎖定能力。
IMS 23 - ACE9600 Path Fading Demo
IMS 23 - Introduction to ACE9600
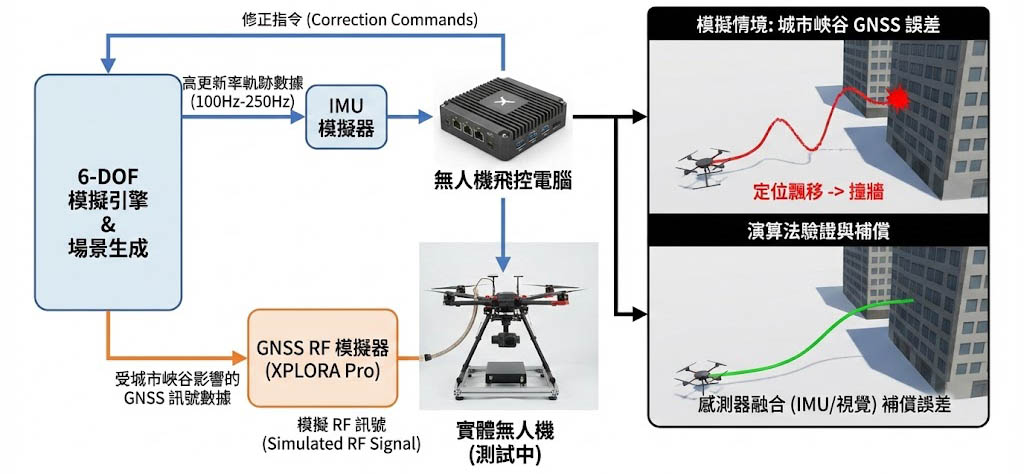
硬體迴路 (HIL) 閉環驗證
這是無人機飛控開發的最後一哩路。
- 與飛控電腦對接:
我們將模擬器的 RF 輸出連接到無人機的 GNSS 天線埠,並將模擬器的 6-DOF 軌跡數據與無人機的慣性導航單元(IMU)模擬同步。 - 閉環測試:
- 模擬器發送「受城市峽谷效應影響」的 GPS 訊號。
- 無人機飛控電腦解算出(有誤差的)位置。
- 飛控電腦根據錯誤位置發出修正指令(例如向左修正,結果反而撞牆)。
- 觀察並調整 感測器融合演算法(Sensor Fusion),驗證是否能透過 IMU 或視覺 odometry 來補償 GNSS 的誤差。
- 低延遲互動:
XPLORA Pro 支援高達 100Hz - 250Hz 的更新率,確保模擬環境能即時響應無人機的高速姿態變化。
應用擴展:干擾與欺騙防禦
城市環境中不僅有大樓,還有惡意的干擾源。
- 混合威脅模擬:系統可以在模擬城市多路徑的同時,疊加 干擾(Jamming) 或 欺騙(Spoofing) 訊號,這對於驗證警用或物流無人機在複雜電磁環境下的生存能力至關重要。
實際系統配置將因應您的無人機類型(多旋翼/定翼)、飛行高度及測試標準而有所不同,如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
立即聯繫奧創系統,讓我們協助您在實驗室中「預飛」未來的城市航路,確保您的無人機在真實的鋼筋水泥叢林中,依然能擁有一雙看透迷霧的慧眼,安全抵達每一個目的地。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008