
掃描振鏡掃描範圍擴展策略:焦距、波長與硬體方案探討
當您決定製程需要振鏡式雷射掃描儀的速度與精度時,首要面對的挑戰便是確定應用所需的掃描範圍,許多疑問可能會隨之而來,包括:
「什麼是掃描範圍?」
「我的雷射與光學設備將如何影響掃描範圍?」
「有哪些策略可以擴大掃描儀的掃描範圍?」
本白皮書將闡明影響掃描儀掃描範圍的各項規格,並重點介紹可用於改善此一性能的硬體與控制器導向解決方案。
什麼是掃描範圍?
雷射掃描儀的掃描範圍(Field of View),是指系統的雷射光束可透過透鏡聚焦的焦平面(focal plane)區域,在透鏡的規格書中,此區域通常會以一個類似圖 1 所示的正方形來表示,這張稱為理論光點圖的影像,是用於描述在振鏡掃描儀掃描範圍內任何給定點上,雷射光束的聚焦光點大小(focused spot size)的特性,了解光點大小的預期特性,有助於預測在焦平面上雷射標記的尺寸,並進而預測掃描範圍內任一點的預期能量密度(energy density)。
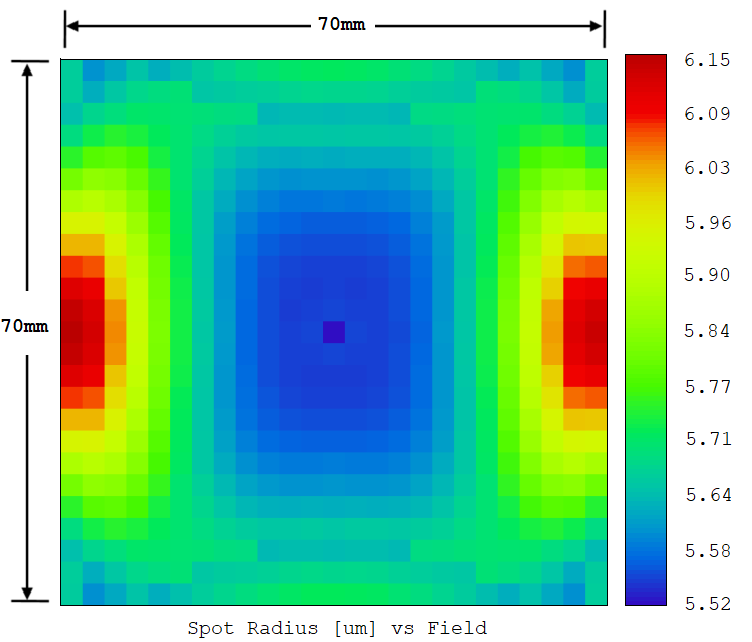
圖 1. 此為 70x70mm 掃描範圍的理論光點分佈圖,顯示在 163mm f-theta 透鏡與 515nm 雷射配置下,光點半徑的變化。色彩表示光點大小,從中央最小的 5.52µm(藍色),向邊緣逐漸增大至 6.15µm(紅色),此圖直觀呈現了整個工作區域內,雷射聚焦品質與能量密度的非均勻分佈特性。
為何掃描範圍的大小至關重要?
任何超出掃描儀掃描範圍的特徵加工,都需要額外增加線性或旋轉平台來移動基板,以處理下一個未標記的區塊,這些附加的平台不僅會導致更高的系統成本,更會因為需要同時控制掃描儀與伺服平台子系統而增加整體複雜性,此外,從一個區域移動到下一個區域的過程,通常稱為「步進掃描」(step and scan),這種方式會讓整體製程速度受限於伺服平台的移動速度,此策略不僅耗時,且在不同掃描區域的交界處幾乎總是會出現瑕疵,如圖 2 所示,這些被稱為拼接誤差(stitching errors)的瑕疵,是源於掃描範圍邊緣的失真與下一區塊無法完美匹配所造成,因此,在為系統增加伺服平台之前,應優先評估是否能透過其他方法擴展掃描範圍以滿足製程需求。
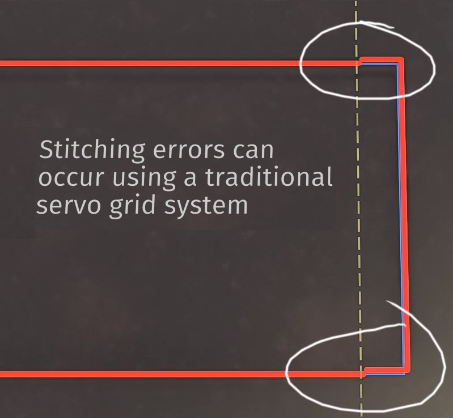
圖 2. 步進掃描造成的拼接誤差
如何擴展我的掃描範圍,以及這會對製程產生何種影響?
您可以透過調整特定的設定元件來強化掃描儀的掃描範圍,本文將涵蓋的元件包括焦距(focal length)、雷射波長(laser wavelength)與輸入光束尺寸(input beam size),變更這些元件各自會帶來獨特的優點與缺點。
其中一個最直接改善掃描範圍的方法,是選用具有更長焦距的透鏡,圖 3 的圖示說明了焦距高度的變化如何增加掃描範圍,然而,這種距離的增加是有代價的,改變掃描儀的掃描範圍時,常需要在光點大小與掃描範圍之間做出取捨。
基礎光學原理指出,光點大小與焦距成正比,因此,隨著與焦平面的距離增加,光點大小也不幸地隨之增大,如果製程不容許犧牲光點大小,就必須尋求其他能夠擴展掃描範圍的方法。
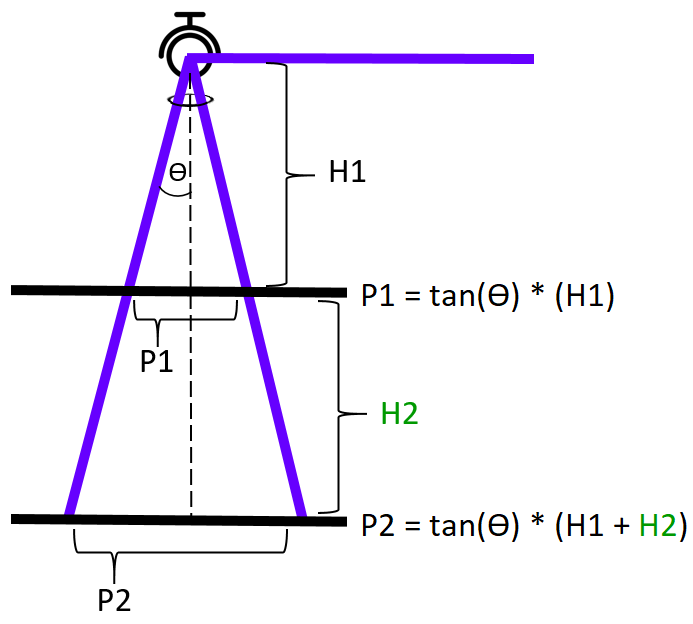
圖 3. 掃描範圍與焦距高度的關係變化,從圖中公式 P = tan(Θ) * H 可以清楚看到,在掃描儀的最大角度 Θ 保持不變的前提下,可掃描的寬度 P 與焦距高度 H 成完全正比關係;因此,當您選擇一個焦距更長的透鏡,或是將工作平面放置在離掃描儀更遠的位置(從 H1 增加到 H1 + H2),最終可加工的範圍便會從 P1 等比例地擴展到 P2;這也是擴展加工區域最直接的方法之一,但如內文所述,其代價通常是雷射的聚焦光點也會隨之變大。
雷射的波長同樣直接影響光點大小與掃描範圍,這點在比較圖 1 與圖 4 時可以清楚地觀察到光點大小和掃描範圍的差異,這兩張光點圖都是使用 163 mm 遠心 f-theta 透鏡產生的,當使用如圖 4 所示的 1030 nm 波長雷射時,可用的掃描範圍相較於圖 1 中使用的 515 nm 雷射,增加了約 47%,這看似達成了目標,然而,仔細觀察後會發現,光點大小卻增大了將近四倍,再次地,如果製程無法接受如此大的光點大小增幅,就必須考慮採用其他方式,在維持光點大小的同時增加掃描範圍。
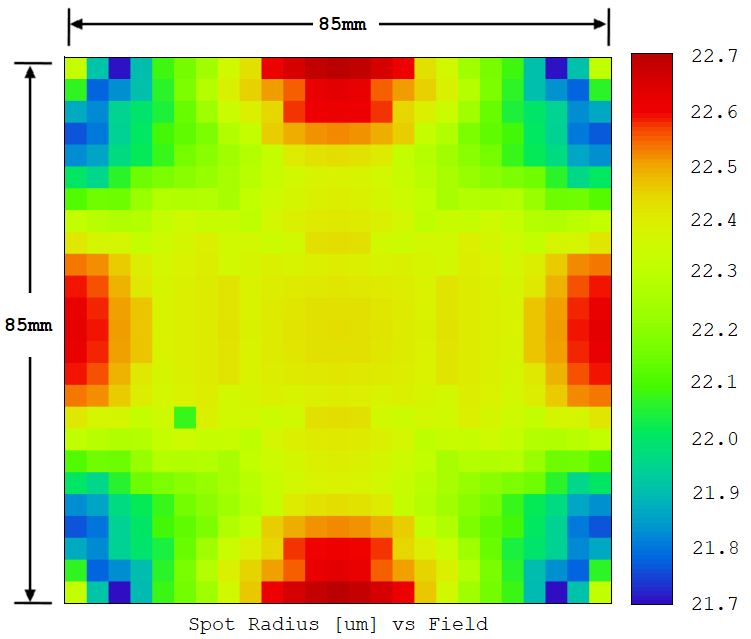
圖 4. 此理論光點分佈圖與圖 1 進行對比,以說明雷射波長在光學系統中的關鍵作用,圖中的光學配置(163mm 遠心 f-theta 透鏡、14mm 輸入光束)與圖 1 相同,唯一的變數是將雷射波長從 515 nm 增加至 1030 nm;此圖清楚揭示了雷射系統設計中的一個核心權衡(Trade-off):雖然選擇較長的雷射波長能讓您在不更換透鏡的情況下獲得更大的工作區域,但必須接受光點顯著變大的後果;工程師必須根據應用的實際需求,在「加工範圍」與「加工精度」這兩個互相制約的因素之間做出最佳選擇。
在所有其他元件條件相同的情況下,具有較小輸入孔徑(input apertures)的掃描頭,可形成更有利的機械結構配置,讓透鏡能更靠近最終的轉向鏡,這種配置方式能產生更大的掃描範圍,然而,較小的孔徑尺寸與較小的輸入光束直徑,將會導致最終的光點大小增加。
相對地,透過增加入射光束的尺寸,可以縮小掃描範圍內的光點大小,但是,隨著雷射光束與輸入孔徑的尺寸增加,用來將光束反射至工件的反射鏡尺寸也必須隨之增大,反射鏡尺寸的增加會為馬達組件帶來更多的轉動慣量(inertia),這可能會降低掃描儀系統的動態性能(dynamic performance)。
總結來說,為了強化掃描範圍而進行的元件級與規格級變更,各自都有其優點和缺點,如果調整焦距、波長或輸入光束直徑都無法獲得可接受的掃描範圍與光點大小,就必須考慮採用硬體和控制器導向的解決方案。
擴展掃描範圍的掃描儀解決方案
單一樞軸點掃描儀
單一樞軸點掃描儀 (Single Pivot-Point Scanners) 為操作者提供了一種在給定 f-theta 透鏡下擴大掃描儀掃描範圍的解決方案,這類掃描儀在傳統的雙鏡系統中引入了第三片反射鏡,這片額外的反射鏡可以防止光束在最終反射鏡上產生偏移(walking),從而讓最終反射鏡與聚焦光學元件可以非常靠近彼此,這種定位方式讓 f-theta 透鏡的使用效率更高。
這種緊密的配置提供了更大的掃描範圍、更小的最大光點直徑,以及在掃描範圍內更小的光點大小變異,如圖 5 所示,採用此三鏡配置的 Aerotech AGV-SPO,能將 355 nm 波長、255 mm 焦距的遠心透鏡的掃描範圍擴大達 2.5 倍之多。
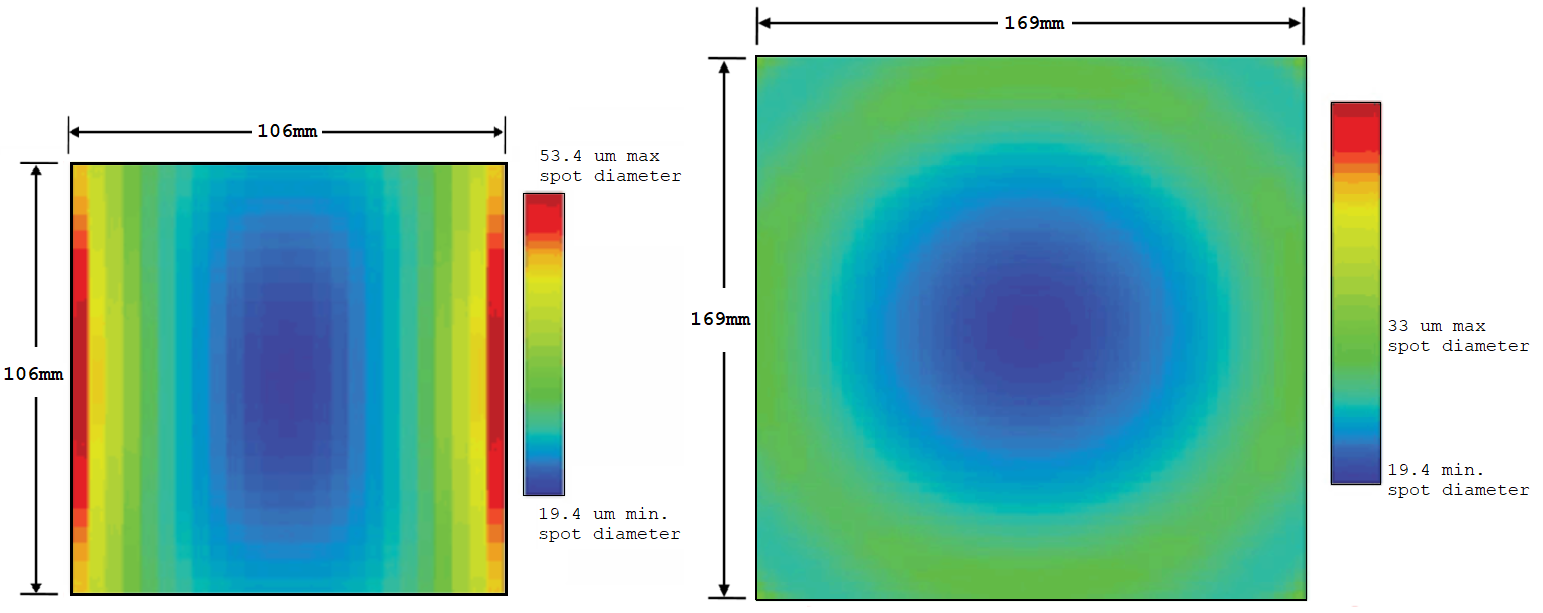
圖 5. 傳統二軸掃描儀與單一樞軸點(Single Pivot-Point)掃描儀的性能比較:此圖透過並列比較,清楚地展示了採用單一樞軸點技術的掃描儀(右圖),相較於傳統二軸(X-Y)振鏡掃描儀(左圖),在光學性能上的顯著優勢;比較的基礎是使用相同的雷射與 f-theta 透鏡配置。
然而,這種三鏡配置也存在缺點,第三片反射鏡需要一個額外的控制軸硬體,與傳統的二維掃描儀相比,由於額外反射鏡的轉動慣量,其動態性能會略有下降。
後置物鏡掃描
另一種擴大掃描儀掃描範圍的策略是採用後置物鏡掃描(Post-Objective Scanning)配置,目前為止所提到的大多數技術與元件,都是將聚焦光學元件整合在前置物鏡掃描(Pre-Objective Scanning)配置中(也就是掃描儀反射鏡將光束導入聚焦透鏡),而在後置物鏡掃描儀中,光束的聚焦發生在掃描儀反射鏡之前,這可以用來將掃描範圍擴展到典型振鏡掃描儀所能達到的範圍之外。
透過在振鏡掃描儀反射鏡之前聚焦光束,可實現的掃描角度將不再受到聚焦透鏡的輸入孔徑尺寸限制,取而代之的是,掃描區域的新極限變成了振鏡馬達本身的機械極限,或是掃描儀外殼的出光孔徑,下表顯示了使用 Aerotech AGV3D 掃描儀可實現的光點大小與對應的掃描範圍。
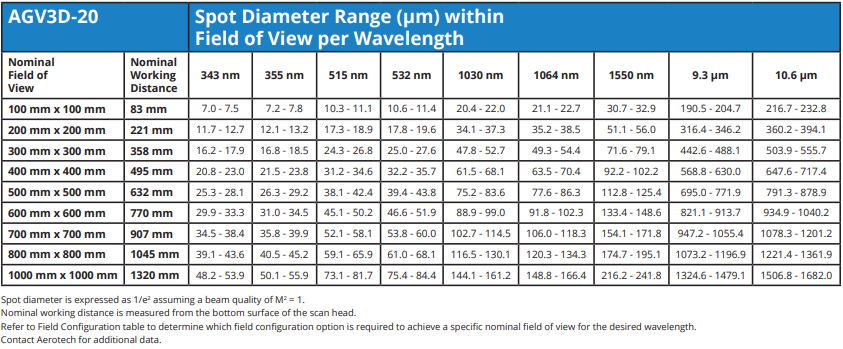
圖 6. 此表格詳細列出了 Aerotech AGV3D-20 型號,在不同的掃描範圍 (FoV)、工作距離和雷射波長 (Wavelength) 組合下,所能實現的光點直徑範圍;AGV3D 系統能夠動態地調整其內部光學元件,以在極大的工作距離範圍(從 83 mm 到 1320 mm)內改變焦點位置,從而自由地匹配從 100 mm 到 1000 mm 的掃描範圍需求,這正是「後置物鏡掃描」技術的精髓所在,也是它能夠被應用於加工複雜 3D 曲面和立體工件的基礎。
後置物鏡掃描還帶來了在不同焦距下聚焦光束的額外好處,由於基板並非總是平坦的,有時甚至相當複雜,藉由後置物鏡掃描,使用者便能處理傳統振鏡掃描儀無法加工的複雜三維曲面與體積。
此配置的缺點則包括在掃描範圍邊緣的光點失真,以及控制架構的複雜性增加,在前置物鏡掃描配置中,遠心 f-theta 透鏡能確保雷射光束以垂直或接近垂直於掃描頭的角度接觸焦平面,而在後置物鏡掃描儀中,光束以較大的入射角接觸基板,這可能導致光點在掃描範圍的邊緣產生變形。
雷射掃描儀技術方案總結比較表
|
特性比較 |
傳統二軸結構 |
三鏡結構 |
後置物鏡掃描 |
|
核心結構 |
雷射 → 掃描鏡 → f-theta鏡頭 |
雷射 → 掃描鏡 → f-theta鏡頭 |
雷射 → 聚焦系統 → 掃描鏡 |
|
別稱/類型 |
標準振鏡掃描儀、2D掃描儀 |
高性能2D掃描儀 |
3D掃描儀、動態對焦掃描儀 |
|
掃描維度 |
2D (X, Y) |
2D (X, Y) |
3D (X, Y, Z) |
|
掃描範圍 |
受限 (由f-theta鏡頭決定) |
巨大 (同顆鏡頭下可達2.5倍) |
極度靈活 (不受f-theta鏡頭限制) |
|
工作距離 |
固定 |
固定 |
可變 (可動態調整Z軸焦點) |
|
光點品質 |
邊緣劣化嚴重、不均勻 |
全域均勻、邊緣品質優異 |
邊緣易產生光點變形(橢圓) |
|
最大優點 |
速度快、結構簡單、成本低 |
大範圍與高精度兼得 |
可加工3D曲面、工作範圍與距離極度彈性 |
|
主要限制 |
掃描範圍小、邊緣品質差 |
成本較高、慣性稍大 |
控制架構複雜、邊緣光點易失真 |
|
典型應用 |
一般2D雷射標記、切割、焊接 |
大尺寸 PCB/晶圓加工、面板處理、高精度大範圍打標 |
汽車鈑金曲面加工、模具雕刻、斜面/球面打標、3D列印 |
擴展掃描範圍的控制器導向解決方案
有時候,基板尺寸實在太大,無法容納於任何掃描儀配置或透鏡的掃描範圍之內,幸運的是,現已有控制器導向的解決方案,能夠同步化線性或旋轉伺服軸與雷射掃描儀,Aerotech 的無限掃描範圍 Infinite Field of View (IFOV) 特性,可在控制器中自動完成此項任務,無需針對每個路徑進行個別優化,同步化伺服軸與掃描軸讓雷射掃描儀的使用者能大幅擴展其系統的運作區域,大於掃描儀掃描範圍的圖案可以被連續加工,這不僅改善了加工品質,同時也降低了程式設計的複雜性並縮短了週期時間,位置指令序列會被分割給掃描儀和伺服平台,掃描儀負責處理高加速度的複雜運動,而伺服平台則確保材料始終維持在掃描儀的工作範圍內。
此技術對於超快雷射應用,或需要極小光點大小以維持雷射功率密度高於材料燒蝕閾值的場合而言,是相當理想的選擇,利用這些技術,便可以使用短焦距透鏡來縮小雷射光點大小,同時仍能讓掃描儀觸及廣大的工作區域,最終,使用者能夠為其工作選擇最佳的光學配置,而無需在工作區域上做出妥協。
無限掃描範圍 (IFOV) 同步化線性/旋轉伺服軸與雷射掃描儀
Aerotech 無限掃描範圍 (IFOV),是一套獨特且領先業界的解決方案,專門用於同步化線性或旋轉伺服軸與雷射掃描儀的運動,IFOV 能顯著提升產能,並徹底消除因雷射加工區域重疊或失配所引起的拼接誤差與工件品質問題,透過結合振鏡掃描儀的高動態性能與伺服平台的大行程範圍,即使是尺寸遠大於掃描儀傳統掃描範圍的工件,也能夠被連續加工,無需再將獨立的工作區域拼接在一起。
無限掃描範圍不僅擴展了任何振鏡系統超越光學極限的工作區域,更藉由無論光學元件如何選擇都能擴展掃描範圍的方式,消除了在雷射光點大小與可用工作區域之間的權衡,進而提升了大型工件的加工品質與產能,因此,使用者能夠為其工作選擇最佳的光學配置,而無需在工作區域上妥協,從而免去了採用折衷方案的需求。

使用者的工件輪廓(深藍色)如何在掃描儀與伺服平台之間進行分割,較大範圍的運動(黑色)由伺服平台執行,以將客戶輪廓的全部範圍暴露於掃描儀的掃描範圍(紅色)內,並在該範圍中執行剩餘的高動態運動。
設計特點
- 易於使用的設定參數,能在每一個輪廓上輕鬆執行
- 由單一控制器進行即時同步的軌跡生成
- 掃描儀對伺服平台的追蹤進行自動化動態誤差校正
- 支援使用先進的雷射控制功能,例如位置同步輸出 (Position Synchronized Output, PSO) 與類比向量追蹤 (Analog Vector Tracking)
- 透過 Aerotech 的 CADFusion 套裝軟體,優化組合運動路徑的執行順序
- 專為與 Aerotech AGV 振鏡掃描儀搭配使用而設計;同時相容於以 XY2-100 協定驅動的第三方掃描儀
簡易直觀的操作
IFOV 的運作無需使用者針對不同的運動路徑調整參數和設定,每次都能穩定執行,這是因為 IFOV 使用單一控制器來處理使用者所需的 2D 輪廓,並將其即時轉換為伺服平台與掃描儀的相對運動,IFOV 會考量掃描儀可用的工作區域,以確保其指令軌跡維持在掃描範圍之內,同時,它也會考量伺服軸與掃描儀軸的加速度及電流限制,確保指令運動不會在任何一軸上引發錯誤狀況,在整個過程中,組合運動都能精確地維持使用者指定的刀具路徑。
更高的精度與產能
相較於類似的解決方案,IFOV 同時帶來了產能與精度的提升,由於 IFOV 採用統一的開放式控制架構,它能在整個控制器之間共享真實的回授資訊,並將其提供給使用者,因此,掃描儀的運動軌跡會包含伺服軸的動態追蹤誤差,並對其進行即時校正,這意味著無論是否使用組合運動,使用者都能在整個工件上獲得掃描儀等級的動態追蹤性能,這也代表伺服平台可以被驅動得更快、更具侵略性,而不會影響最終成品的整體精度與品質。
相容於先進的雷射控制功能
驅動器之間整合的回授通訊,允許創建並使用那些基於刀具在工件上 (tool-on-part) 的實際位置與速度的雷射控制功能,諸如 Aerotech 的位置同步輸出 (PSO) 與類比向量追蹤等功能,讓使用者能根據刀具位置的函數來觸發雷射,並根據刀具速度的函數來調變雷射功率。
透過 CADFusion 優化組合路徑
當執行包含伺服平台與掃描儀組合運動的輪廓時,優化工件特徵的執行順序對於發揮 IFOV 解決方案的所有優勢至關重要,Aerotech 的 CADFusion 2D CAD/CAM 軟體套件內建了優化參數,允許使用者為任何系統規劃出最高效的特徵執行順序,它也讓使用者能夠影響 IFOV 演算法如何在兩個子系統之間分割完整的運動輪廓,並專門為組合式掃描與伺服運動進行路徑優化,CADFusion 讓使用者能夠創建、編輯、填充、優化任何向量式的 CAD 資料,並將其轉換為 Aerotech 可執行的 G-code 運動指令。
適用於所有 Aerotech AGV 產品及以 XY2-100 驅動的掃描儀
IFOV 這項整合控制器功能,適用於所有 Aerotech 的 AGV 系列振鏡掃描儀產品,其效益的實現源於由單一控制器與控制架構來指令這兩個運動子系統,然而,使用者也可以使用 Aerotech 的控制器,並利用 IFOV 控制器功能來搭配接受 XY2-100 指令通訊的第三方平台與掃描儀,在將第三方設備與 Aerotech 的 Automation1 控制器整合的實施方案中,掃描儀的伺服迴路是封閉在第三方自身的驅動硬體內,並未對 Automation1 控制器開放以供查詢,因此,使用者會失去在單一控制器上進行回授整合的好處,這意味著伺服平台的動態誤差將無法被校正,且刀具在工件上的真實位置與速度也是未知的,其他失去的優勢還包括如位置同步輸出 (PSO) 與類比向量追蹤等增值的雷射控制功能,這些缺點同樣存在於那些將不同獨立控制器整合在一起的競爭解決方案中,分開生成伺服與掃描儀的軌跡,並試圖在不同的控制器之間同步指令,其效果永遠比不上一個垂直整合的解決方案。