
突破軍用光電與 ISAC 表面檢測極限:SMP 量測平台與動態控制工具箱解析
在二零二六年的前沿國防與航太製造供應鏈中,當極音速無人載具(Hypersonic UAV)的「通訊感知一體化(ISAC)」共形天線,或是低軌衛星(LEO)的「紅外線(IR)反射鏡」完成複雜的雷射微細加工後,隨之而來的是極度嚴苛的品質驗證,這些元件的表面拓樸(Topology)必須完美無瑕。
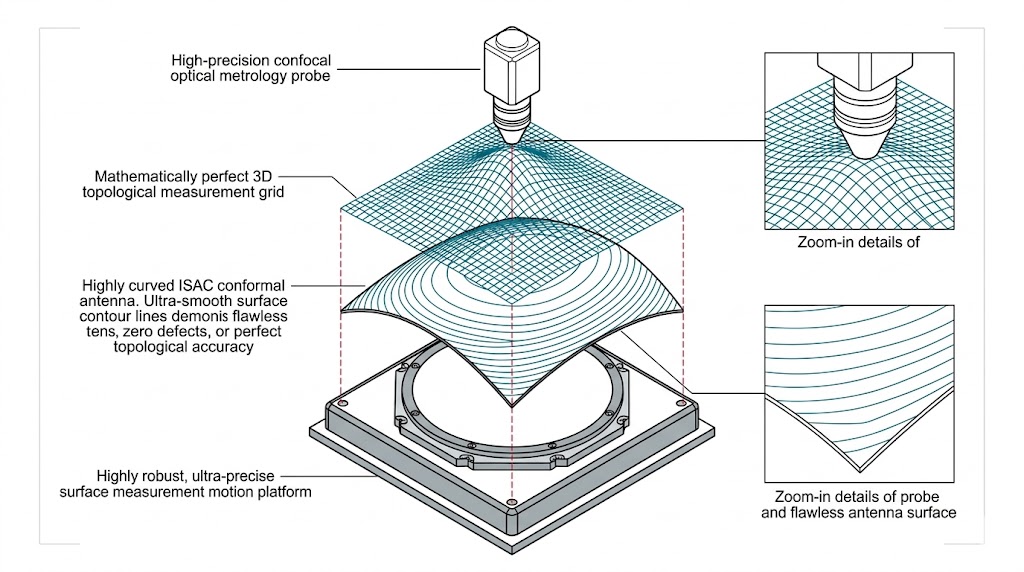 此 ISAC 共形天線展示奈米級拓撲計量,探頭投射完美 3D 網格,運動平台承載,驗證天線表面幾何無瑕。
此 ISAC 共形天線展示奈米級拓撲計量,探頭投射完美 3D 網格,運動平台承載,驗證天線表面幾何無瑕。
在微波高頻傳輸與雷射光學的世界裡,表面上任何幾十奈米(Nanometers)的刮痕、鍍膜缺陷,或是雷射加工殘留的微觀突起,都會導致電磁波的嚴重散射,甚至在高能雷射穿透時引發熱透鏡效應,直接燒毀整個光學模組;因此工程師必須使用共焦顯微鏡(Confocal Microscopes)或白光干涉儀(White Light Interferometers),對這些大面積零件進行百分之百的 3D 表面輪廓量測(Surface Measurement);這是一場在「奈米級解析度」與「高產量」之間的極限拉扯,長期專注於航太級度量衡(Metrology)與高階運動控制,當我們檢視這些檢測產線時會發現傳統的自動化檢測機台正面臨著力學與資訊科學的雙重死胡同:當機台帶著高倍率光學探頭進行高速的「步進與停止」以掃描龐大表面時,機台的微觀結構共振會讓探頭無法看清目標;X 軸的移動甚至會牽連 Z 軸產生位移誤差;且傳統封閉式控制器根本無法將海量的高頻位置數據,即時餵給現代的 Python AI 缺陷檢測模型;本文將純粹從結構激發頻率、多軸交叉干擾以及現代化 IT 軟體架構出發,深度剖析航太檢測工程師所遭遇的三大技術天險,並從系統整合者的視角提出具體的實體產品解決方案。
國際航太度量衡與檢測規範:表面粗糙度與掃描產量的極限容忍度
在探討具體的量測機台痛點之前,我們必須先理解指導這些尖端 ISAC 與光電零件的最高檢驗準則,以美軍針對高能雷射光學表面的 MIL-PRF 規範為例,對於檢測機台在「動態整定時間(Settling Time)」與「跨軸獨立性」提出了極度嚴苛的限制;在進行大面積的 3D 點雲掃描時,規範要求機台必須以每秒數十次的頻率,在 X/Y 平面上進行微米級的步進,每一次步進停止後,Z 軸上的光學探頭必須在幾毫秒內將震動幅度壓制到五奈米以下(< 5 nm),才能觸發相機曝光。只要探頭有絲毫的餘震,拍出來的干涉條紋就會模糊,導致量測軟體誤判表面存在粗糙缺陷;此外,隨著人工智慧(AI)在視覺檢測領域的普及,軍工廠要求檢測機台必須能與廠內的客製化 Linux 或 Windows 伺服器無縫接軌,即時傳輸包含絕對座標戳記的感測器數據,這種對「極速奈米級整定」與「開放式進階軟體 API 整合」的雙重苛求,直接宣告了傳統商用滾珠螺桿滑台與封閉式 PLC 控制器的死刑。
工程實務上的三大奈米級表面量測難題剖析
在上述嚴苛的物理限制與軍規品保框架下,系統整合工程師在建構次世代 UAV 與衛星零件的自動化光學檢測(AOI)機台時,無可避免地會面臨三道極難跨越的技術高牆。
高速步進誘發的「結構共振」與漫長的整定時間
當工程師試圖提高產線的量測量時,首當其衝的力學挑戰是機台的「激發共振(Excited Resonance)」;為了掃描龐大的 ISAC 天線,機台必須頻繁地進行急加速與急減速,這種包含高頻率諧波的運動指令,會像敲擊音叉一樣,輕易激發出機台懸臂(承載光學探頭的結構)的自然頻率,當 X/Y 軸滑台停止時,Z 軸上的光學探頭依然會在奈米尺度下持續晃動(Ringing);在傳統的伺服控制中,工程師只能透過降低加速度,或是寫死一個長達數百毫秒的「延遲等待時間(Dwell Time)」,來讓震動自然消散,當一個零件需要掃描一百萬個點時,每個點多等待一百毫秒,總檢測時間就會暴增近三十個小時,這在追求效率的現代國防製造中是完全無法接受的。
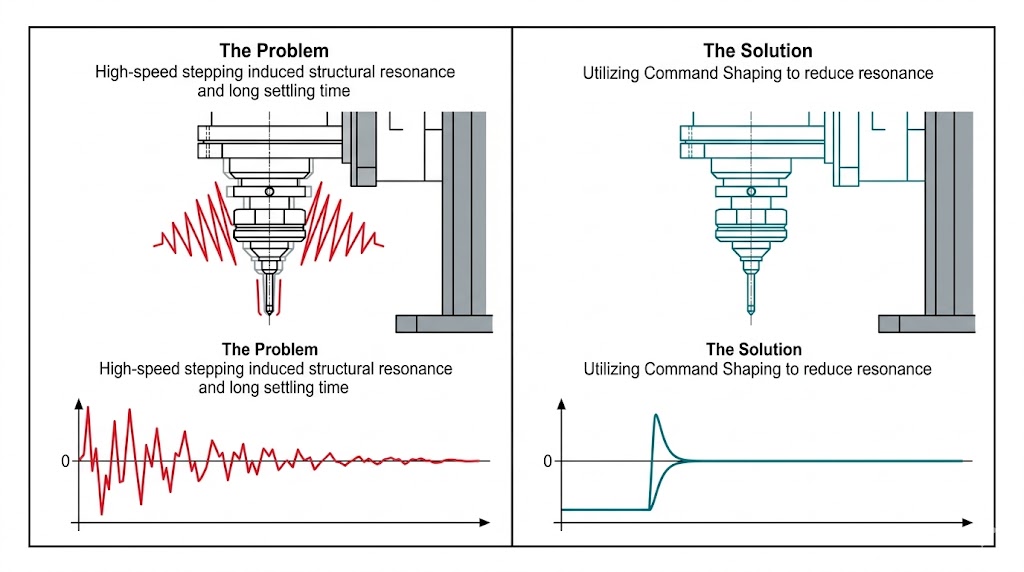
此圖比較高速步進引起的結構共振問題(左,紅色震動)與解決方案,利用「指令整形」(Command Shaping)技術(右,藍色穩定),能有效抑制震動,達成快速無共振的步進定位反應。
多體動力學中的「跨軸干擾(Cross-Axis Disturbances)」
第二個難題發生在多軸系統的空間力學耦合上,在 3D 表面輪廓量測中,通常由下方的 Y 軸滑台負責承載工件,而上方的 Z 軸負責承載精密的光學感測器;在傳統的拼裝機台中,各個軸向的控制迴圈是完全獨立的,然而在物理世界中,當下方的 Y 軸進行一個一毫米的高速步進時,其產生的巨大反作用力會透過機台底座傳遞,導致上方的 Z 軸產生微小的「點頭」或「下沉」位移,這種被稱為「跨軸干擾」的現象,會直接改變探頭與工件表面的絕對距離;共焦顯微鏡對 Z 軸(景深)的誤差極度敏感,如果 Y 軸的移動導致 Z 軸產生了幾百奈米的寄生位移,量測系統就會將這個機台本身的力學誤差,錯誤地記錄為工件表面的「波浪狀起伏瑕疵」,導致大量合格的航太零件被冤枉退件。
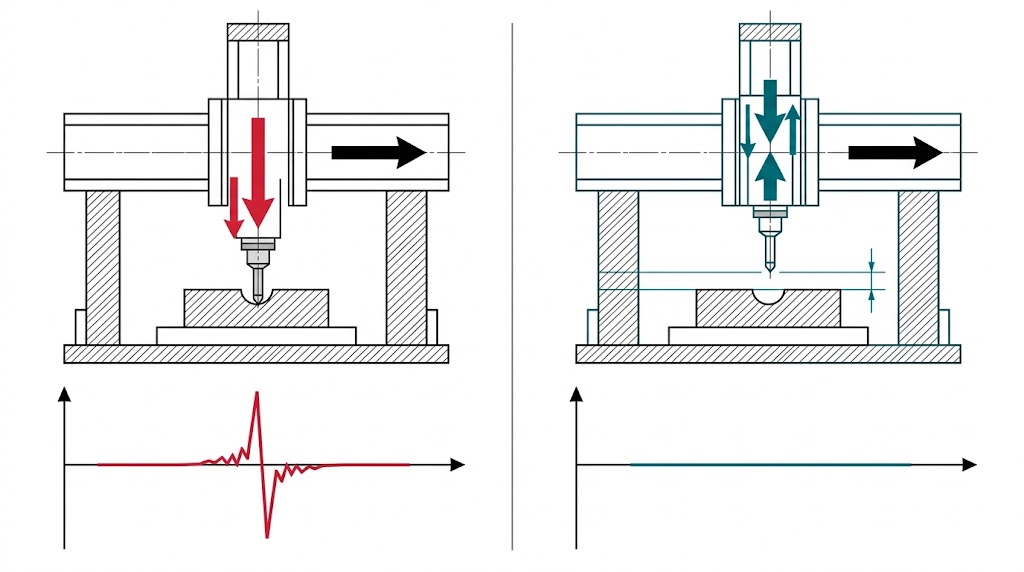
工藝穩定性與振動對比:左側顯示不平衡力下的強烈振動(紅);右側顯示平衡力下的穩定低振動(藍)。
封閉式架構阻礙了現代「客製化 AI 檢測模型」的整合
最後一個難題在於軟體工程與 IT 整合,2026 年的高階自動化檢測已不再依賴傳統基於規則(Rule-based)的視覺軟體,而是大量導入由工程師自行使用 Python 或 C# 撰寫的深度學習(Deep Learning)AI 模型;傳統的機台控制器通常提供極度封閉的底層邏輯,或僅支援老舊的通訊協定,當系統整合商試圖將控制器的「即時奈米座標」與相機抓取的「光學數據」同步餵給外部的 Linux 伺服器進行 AI 推論時,往往會遭遇嚴重的資料流延遲與封包遺失;缺乏現代化、跨平台(Windows 與 Linux)且能直接存取控制器核心的進階程式開發介面(API),使得機台與 AI 大腦之間產生了嚴重的資料孤島(Data Silo),將最高階的演算法硬生生卡在傳輸瓶頸上。
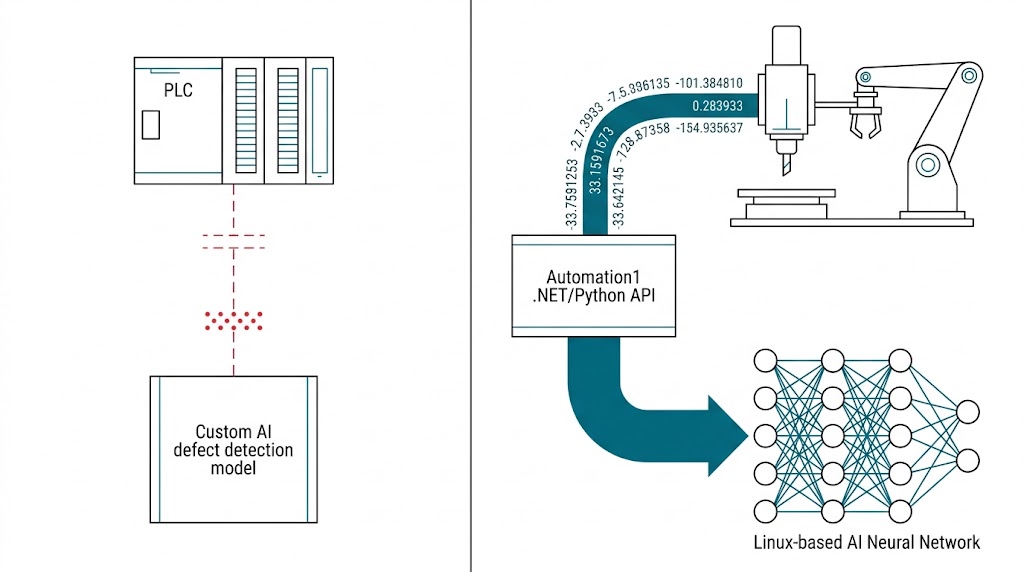
此圖對比傳統 PLC(左)無法整合客製化 AI,與 Automation1 開放 API(右)將機器數據無縫連接至 Linux AI 模型。
面對上述嚴苛的奈米級量測規範與 AI 系統整合痛點,單純依賴購買泛用的自動化滑台並試圖在上位機寫軟體濾波,最終不可避免地將陷入無止盡的震動等待、假性瑕疵判斷與資料通訊當機中;我們為您推薦 Aerotech 經過頂尖國家度量衡實驗室與半導體廠驗證的「實體硬體、演算法模組與軟體 API 產品」,從底層解決空間震動的專用平台,到主動抹平干擾的控制神經,打造一站式的 3D 表面檢測解決方案。
奠定奈米級量測幾何基準的實體載體:SMP 表面量測運動平台
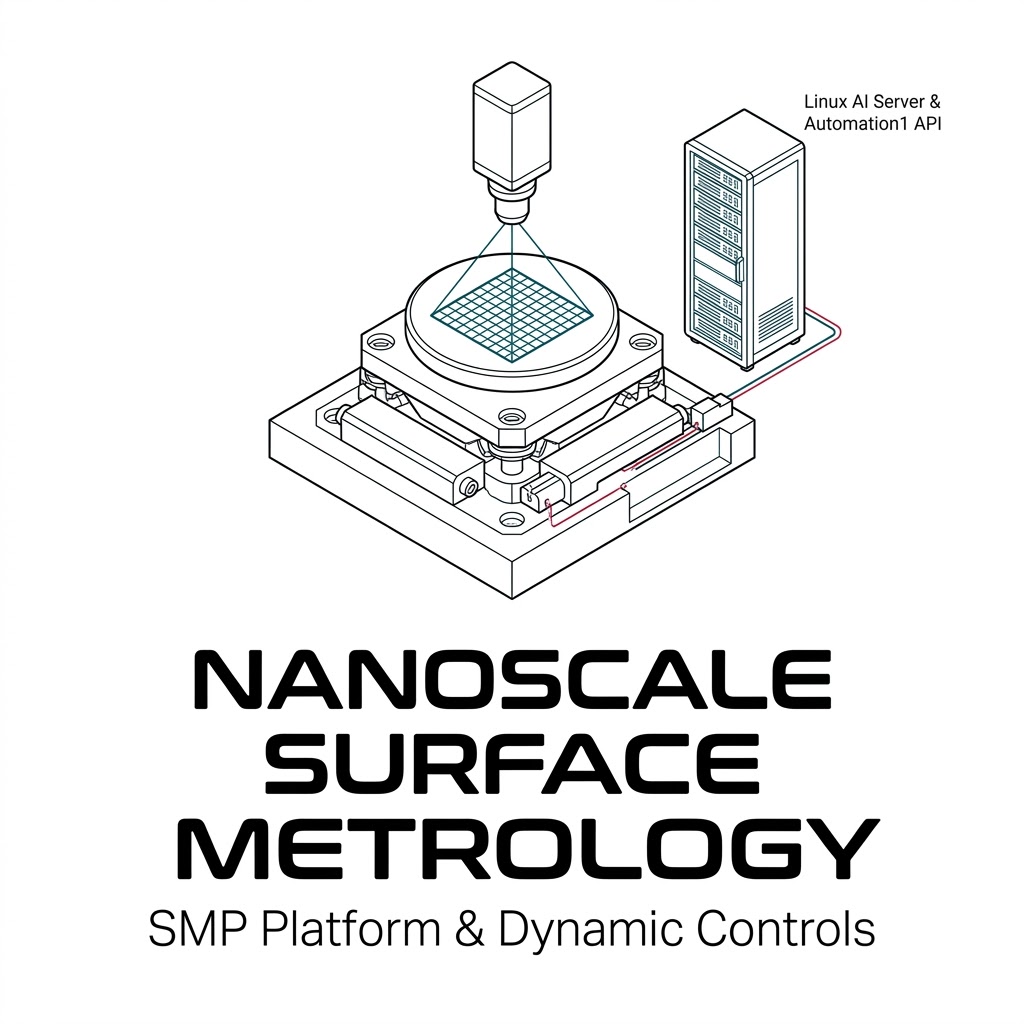
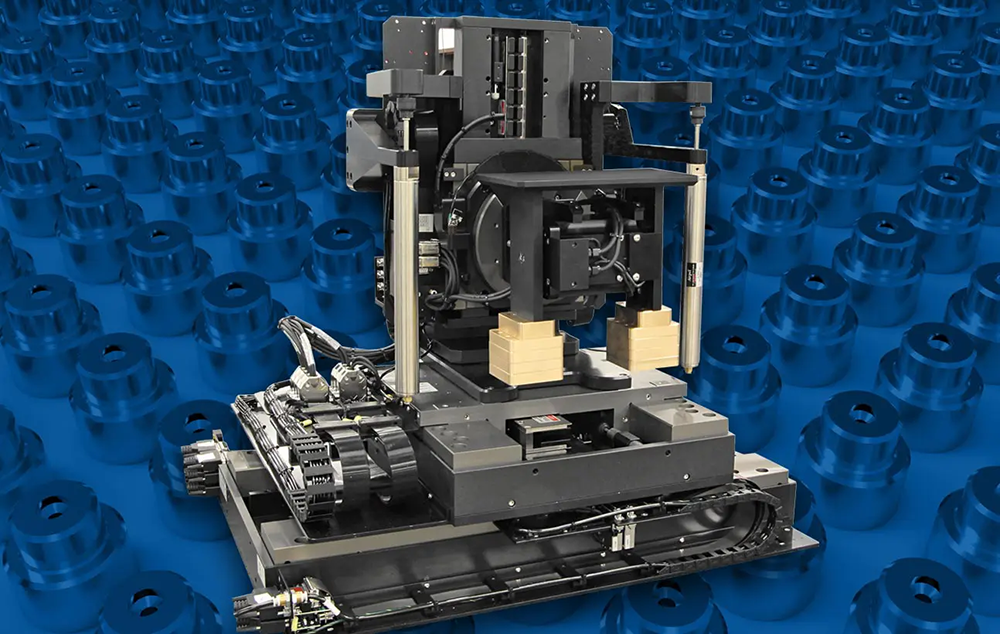
針對拼裝機台帶來的結構共振與微觀變形,Aerotech SMP 表面量測運動平台 (Surface Measurement Motion Platform),這是一台專為嚴苛的 2D 與 3D 輪廓量測深度最佳化的一體化多軸系統,SMP 徹底揚棄了鬆散的拼裝結構,採用了極高剛性的底座與低重心設計,這種緊湊的物理架構不僅大幅縮小了無塵室的佔地面積,更從機械根源上提供了極致的幾何穩定性,使其能輕鬆達成奈米級解析度的微觀定位;SMP 的高動態響應特性,大幅減少了探頭在點與點之間移動的處理時間,為極速表面掃描奠定了最穩固的物理基礎。

SMP 表面量測運動平台,專為 2D 與 3D 表面量量測身打造;具備奈米級精度與高速資料同步功能,可顯著縮短處理時間;無論是精密光學元件量測,還是其他高精度應用,SMP 都能提供卓越效能,實現快速且精確的量測解決方案。
Surface Measurement Platform & Sensor Fusion Data Acquisition Solution
Developing Custom Solutions for Your Most Challenging Applications
主動消滅震動與跨軸干擾的控制大腦:Automation1 動態控制工具箱 (-DCT1)
面對探頭的整定延遲與 X/Y 軸移動對 Z 軸造成的寄生干擾,Aerotech Automation1 控制器 內提供專屬的進階演算法產品:動態控制工具箱 (Dynamic Controls Toolbox, 訂購選項 -DCT1),啟用 -DCT1 後,您的控制器將解鎖兩大殺手級硬體底層功能:
- 命令整形 (Command Shaping):這是一項先進的濾波技術。控制器會主動分析並過濾掉運動指令中會激發機台懸臂共振的特定頻率,這使得 SMP 平台能在極高加速度下急停,而上方的光學探頭宛如凍結般瞬間靜止,徹底消滅了漫長的整定等待時間。
- 跨軸前饋控制 (Cross-Axis Feedforward):為了解決 Y 軸步進對 Z 軸造成的干擾,此功能會在底層將控制增益產生的電流,智慧地分配給不同軸向的馬達,當 Y 軸啟動瞬間,系統會「預先」對 Z 軸馬達施加一個反向微電流來抵抗下沉力矩,將跨軸的位移誤差 (Off-axis position errors) 壓縮至趨近於零,確保光學景深的絕對精準。
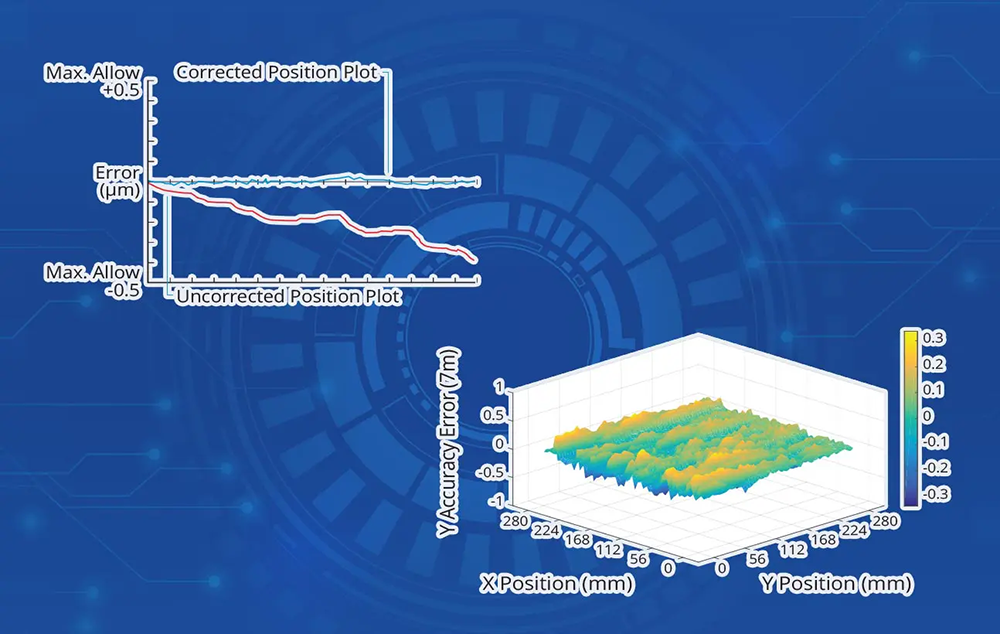
運用量測工具收集線性與角度誤差的相關資料,進而建立校準表,校準數值將會自動套用,且不影響使用者介面中顯示的編程位置,此 iSMC 原生支援 1D、2D 及正交性校準表。

透過 MIMO(多輸入多輸出) 解耦技術,將龍門橫樑 1 與橫樑 2 的運動軸從其線性和偏航控制軸中分離,實現更高的產能與更精確的龍門控制,藉由高速的 HyperWire 運動匯流排,即便僅是單軸驅動器也能夠互相連接,無需複雜昂貴的佈線,即可使用任何 Automation1 伺服馬達驅動器的組合來控制龍門。
透過 HyperWire 光纖通訊匯流排,可對 Automation1 驅動器硬體下達多達 32 軸的伺服/步進馬達與雷射掃描頭的運動指令。
完美橋接自訂 AI 演算法的軟體套件:Automation1 APIs 程式開發介面
為了解決封閉架構導致的資料孤島,並讓您的團隊能自由整合高階 AI 缺陷檢測模型,Aerotech 在軟體產品端免費隨附強大的:Automation1 APIs (支援 Python, .NET Core, C 與 LabVIEW),這套 API 產品賦予系統整合商無與倫比的程式自由度,透過原生的 Python 與 .NET Core 支援,AI 演算法程式可以直接、零延遲地與 Automation1 控制器雙向溝通;更強大的是它具備跨平台支援,這意味著您完全可以將控制器網路連接至運算能力強大的 Linux AI 伺服器上,工程師能直接利用 API 即時抓取高達 320 kHz 的絕對位置座標,並與相機的影像數據完美對齊,讓您專屬的深度學習模型能以最高效率執行 3D 表面瑕疵的即時辨識與分類。
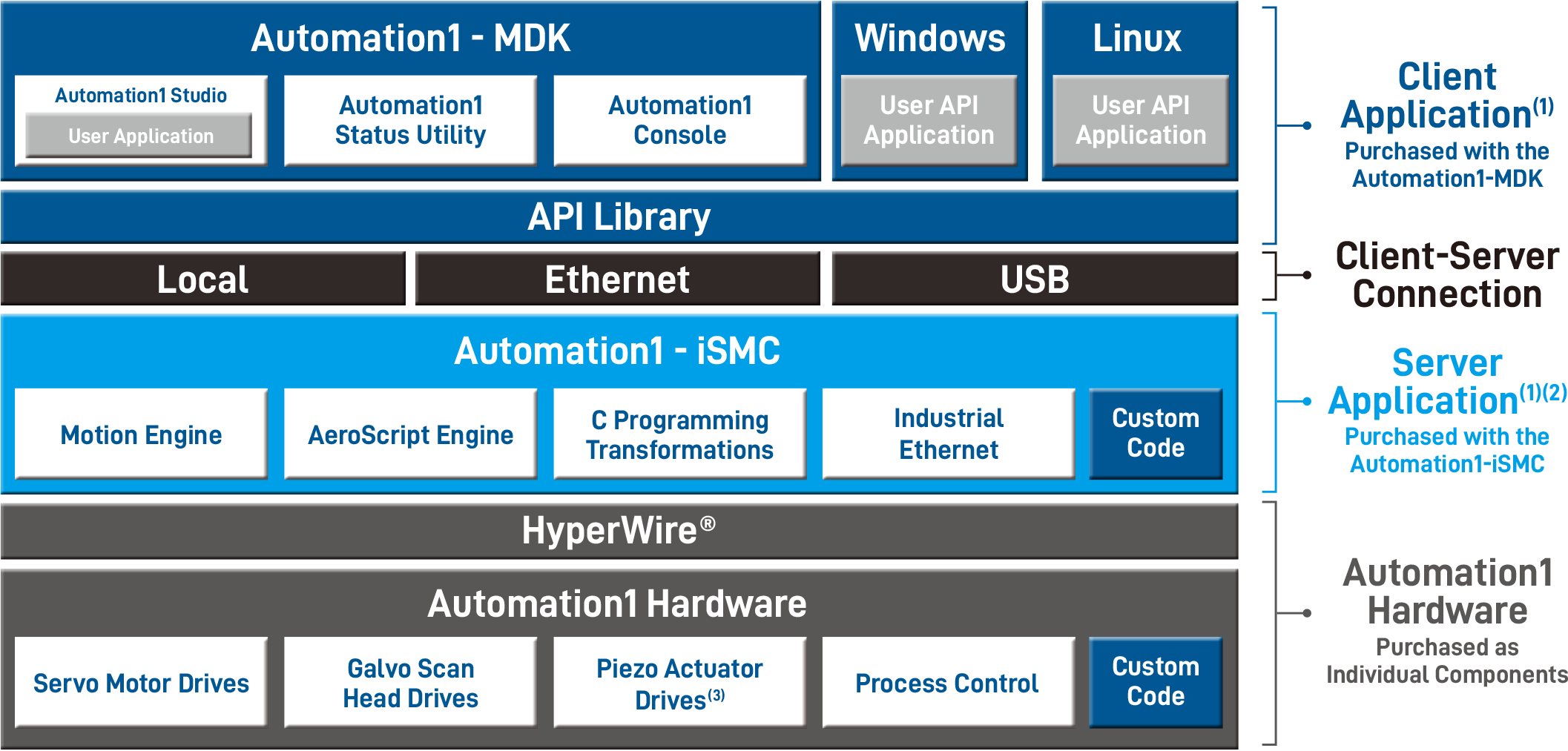
Automation1 平台採用分層式架構,清晰地劃分軟體與硬體;上層的客戶端應用程式,如 Automation1-MDK 與使用者 API,可運行於 Windows 或 Linux 系統;這些應用程式透過 API 函式庫,經由乙太網路或 USB 等介面,與核心的 Automation1-iSMC 伺服器進行通訊;iSMC 內部整合了運動引擎與 AeroScript 引擎,負責執行所有控制邏輯,並透過高速的 HyperWire® 匯流排,即時驅動底層的伺服馬達、檢流計掃描頭等硬體元件,形成一個完整且高效的運動控制生態系統。
打造頂尖的國防 ISAC 與光學元件奈米級量測平台沒有單一標準答案,實際的硬體配置將因應您的感測器重量、量測行程以及 AI 伺服器的 IT 架構而量身打造;如需針對 SMP 平台、動態控制工具箱 (DCT) 或 Python API 進行深入的系統整合建議,請立即聯繫「奧創系統」團隊。我們擁有豐富的航太級度量衡建置經驗,隨時準備為您提供最專業的配置指南。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。