
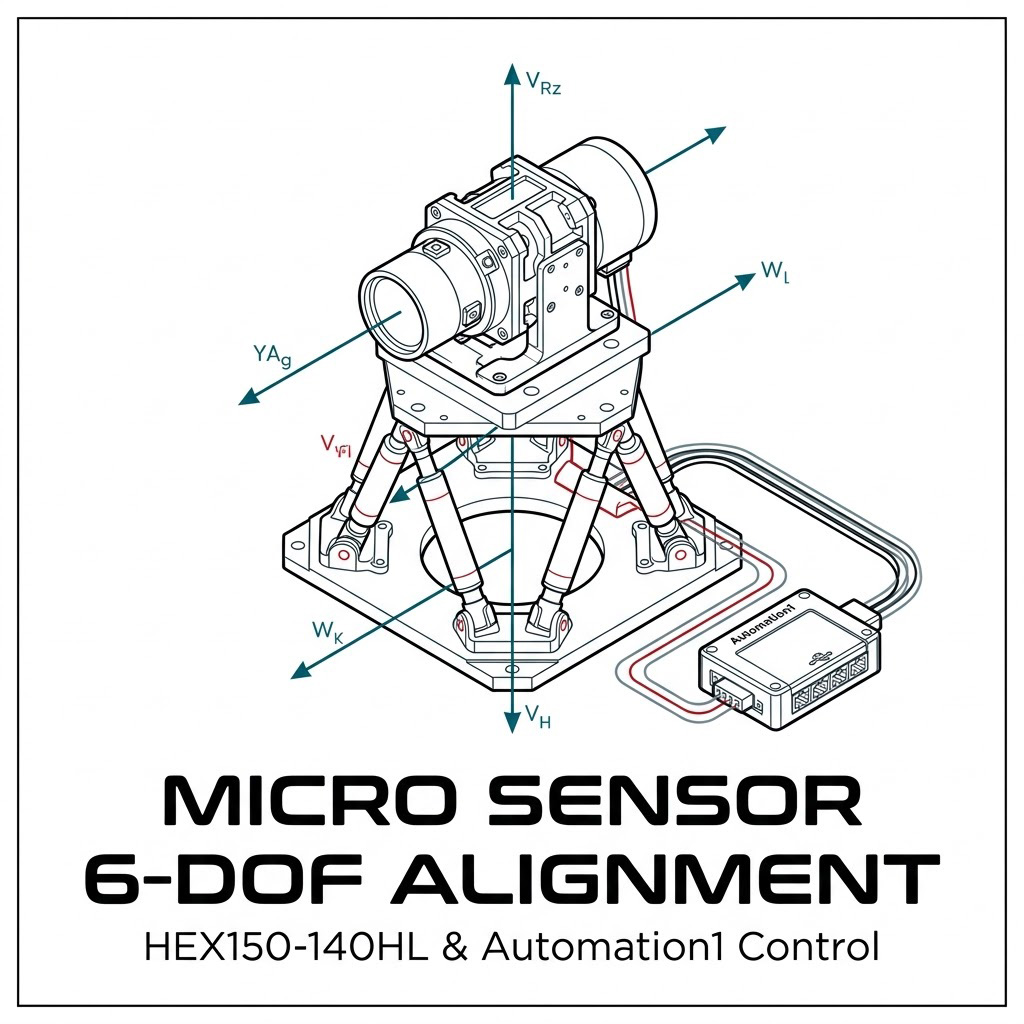
突破軍規微型光電 6-DOF 空間極限:HEX150-140HL 奈米對位與抗反向驅動解析
在國防航太設計中,「SWaP(縮減尺寸、重量與功耗)」已成為開發戰術型無人載具(UAV)與低軌道(LEO)立方衛星的最高指導原則,從原本體積龐大的光電偵蒐莢艙,到現在僅有拳頭大小的微型「星象儀(Star Trackers)」或「ISAC 光學微波收發模組」,所有高價值感測元件都在朝著極致的微縮化邁進。
然而,當這些微型軍規元件進入實驗室進行出廠前的光學對準、晶圓級光電探針測試(Optical Wafer Probing),或是放入極小型的環境測試艙進行硬體在環(HWIL)模擬時,製程工程師卻面臨著巨大的硬體災難,為了測試微型元件在空間中各個姿態的反應,工程師必須在極度受限的微小空間內,建構出具備 X、Y、Z 三維平移以及俯仰(Pitch)、偏擺(Yaw)、滾轉(Roll)的六自由度(6-DOF)動態運動系統,狹小的空間與極致的奈米級精度要求,讓傳統由多個單軸滑台拼裝而成的測試治具徹底失效,甚至引發損毀百萬軍品的風險。
微縮空間 6-DOF 測試的三大工程盲區與對策
當測試環境的可用容積被壓縮到極限時,傳統的巨觀機電設計邏輯將衍生出三大致命盲區,以下將逐一剖析這些物理與控制學上的瓶頸,並探討頂尖微型並聯運動學(Parallel Kinematics)如何從根源解決問題。
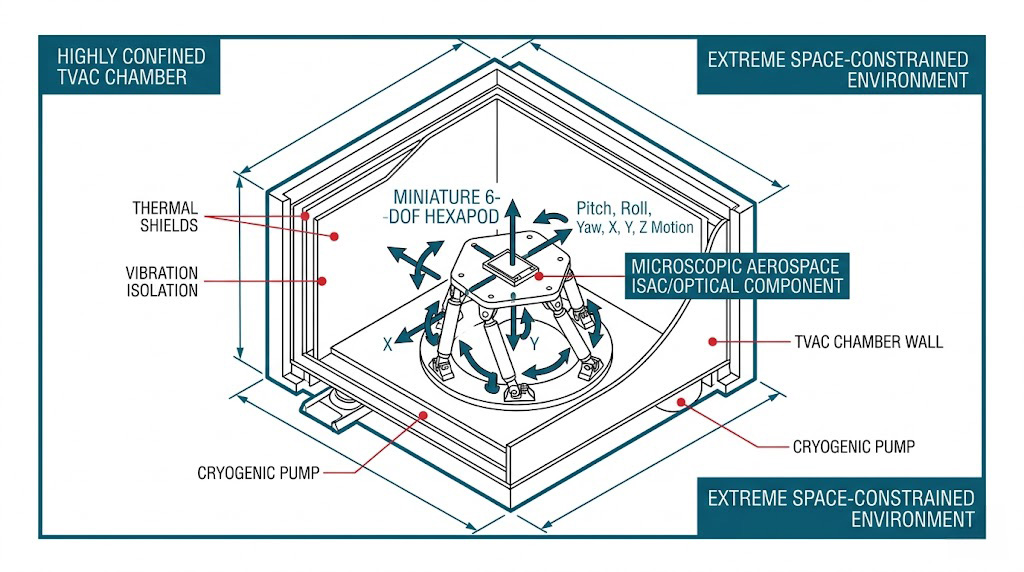
密閉式熱真空腔 (TVAC) 內微型元件測試示意圖。展示微型六自由度併聯機構在極端受限空間下對微型航太元件進行六軸精密動態運動。
傳統堆疊滑台的「空間干涉」與阿貝誤差放大
要實現六自由度運動,傳統的做法是將三個線性滑台與三個旋轉馬達「疊床架屋」地堆疊起來,這種串聯運動學(Serial Kinematics)設計在面對微型測試艙時,往往會因為總體高度過高而直接撞擊艙頂(空間干涉),更嚴重的物理缺陷在於「誤差累加」,最底層滑台微小的幾何偏擺,經過層層堆疊的巨大機械力臂放大後(即阿貝誤差 Abbe Error),會在最頂端微型光學感測器的測試點上,產生高達數十微米的軌跡失真。這會讓工程師誤以為是微型 ISAC 天線的波束成形有瑕疵,從而導致合格軍品遭到錯誤報廢。
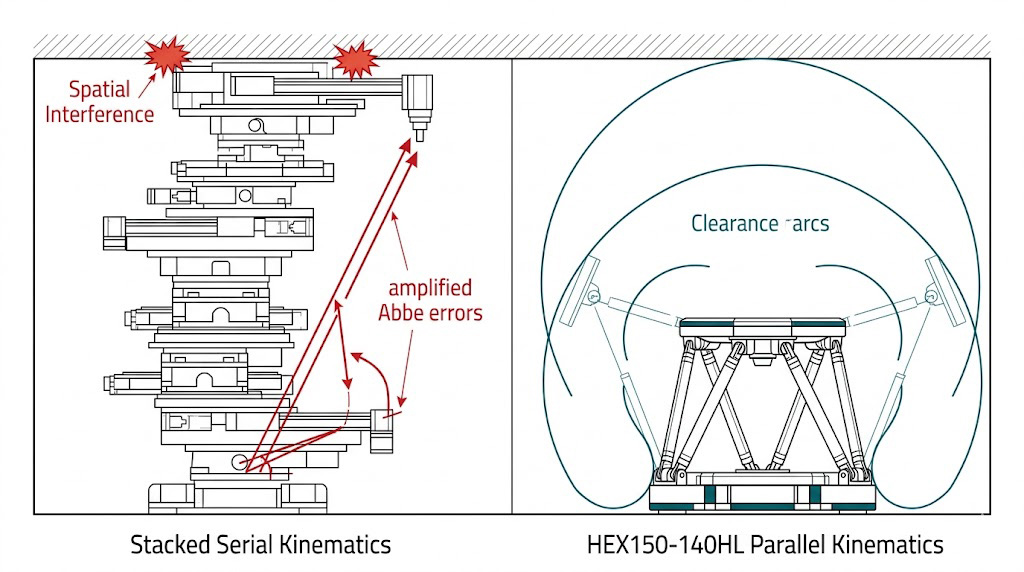
空間限制對比示意圖:左側傳統堆疊式串聯滑台存在空間干涉與放大阿貝誤差,右側HEX150-140HL並聯式平台作動範圍廣且無堆疊誤差。
斷電瞬間的「反向驅動(Backdriving)」墜落風險
第二個致命危機隱藏在動力失效的瞬間,為了在微小空間內承載高密度的軍規光電模組(重量往往高達數公斤),傳統小型滑台多半使用低摩擦力的直驅馬達或細小螺桿,當測試廠房發生瞬間停電,或是觸發緊急停止(E-Stop)時,失去電流保持力的馬達將無法抵抗光電模組的重力,龐大的垂直荷重會瞬間產生「反向驅動(Backdriving)」效應,導致昂貴的航太級感測器宛如自由落體般直接砸向測試艙底板,在空間極度緊湊的環境中,根本沒有安裝額外龐大氣動煞車器的餘裕,這成為高價值軍品測試中的無形炸彈。
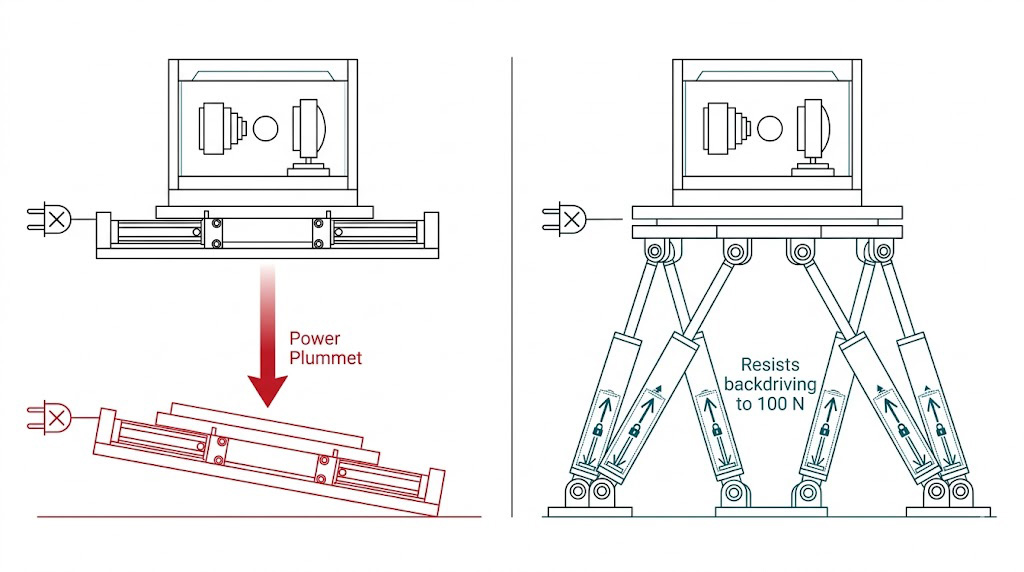
示意圖說明低摩擦直線平台斷電存在反向驅動墜落風險(左);抗反向驅動設計平台(右)即使喪失電力仍能穩固負載,確保安全。
六軸逆運動學的「外部運算延遲」與定位抖動
控制六自由度系統需要龐大的數學矩陣運算,以將操作員輸入的直角座標(笛卡兒座標)轉換為各個馬達的實際移動量。 在傳統架構中,這類複雜的「逆運動學(Inverse Kinematics)」通常交由外部的工業電腦(IPC)來計算,當系統在進行奈米級的光學峰值搜尋(Peak-Finding)時,外部電腦將計算結果透過網路傳輸給底層驅動器,會產生數十毫秒的通訊延遲與時基抖動(Jitter),這種控制神經的遲滯,會讓微型測試平台在逼近目標座標時產生來回震盪,根本無法穩定停留在奈米級的測試駐點上。
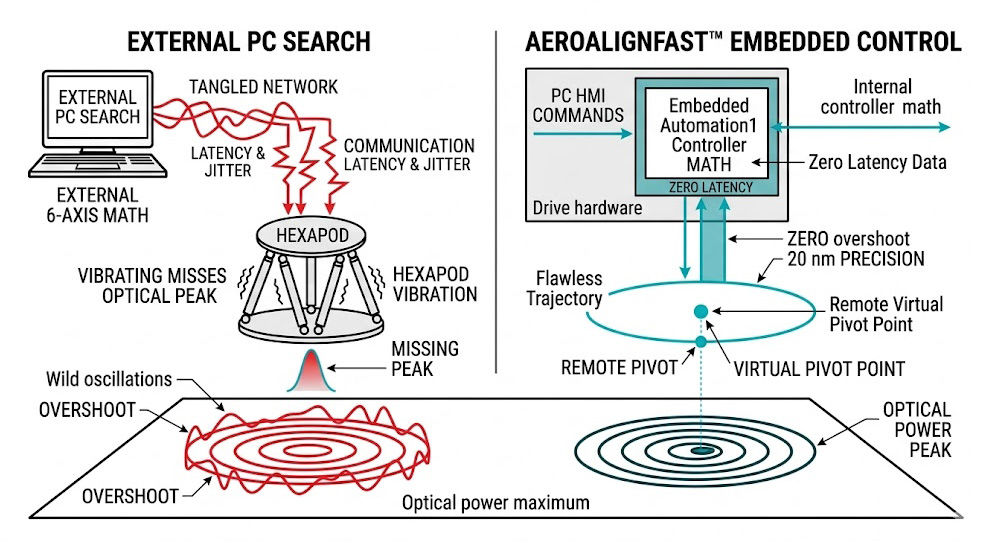
示意圖對比外部 PC 與嵌入式控制,外部控制因網路延遲抖動導致六軸平台震動,偏離光學峰值,AeroAlignFast™ 嵌入式控制具零延遲數據運算,達成 20奈米精度與無超調的完美軌跡定位。
抗干涉與絕對安全的微型六軸平台
面對上述嚴苛的 SWaP 空間限制、阿貝誤差與重力墜落風險,我們捨棄了傳統的串聯堆疊邏輯,直接為您導入 Aerotech 專為空間受限與高解析度要求所設計的「微型六軸並聯定位系統」與「硬體級一體化控制器」,構築堅不可摧的微觀測試防線。
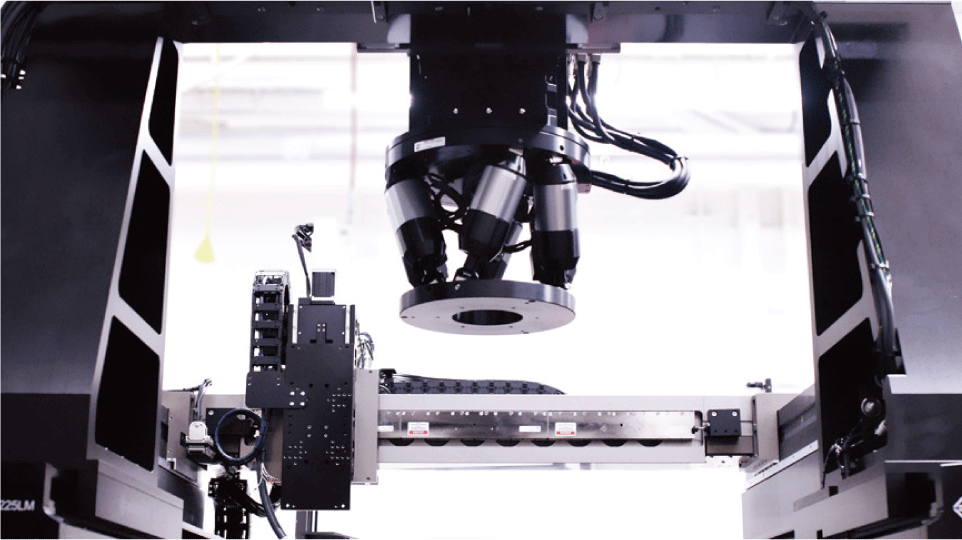
終結空間干涉的奈米級載體:HEX150-140HL 微型六軸定位系統
針對傳統堆疊滑台體積龐大且誤差累加的問題,我們提供 Aerotech HEX150-140HL 微型六軸六自由度定位系統 (Miniature Hexapod Six-DOF Positioning System),這是一台以「並聯運動學」為核心的精密設備,透過六根精密驅動支柱並聯支撐頂部平台,HEX150-140HL 將六個自由度的運動能力,極限壓縮在一個極度緊湊的體積內(其底座僅約 150 毫米寬),這使其能夠輕鬆放入光學晶圓探針台或小型真空艙中,徹底免除了空間干涉的疑慮,在精度表現上,並聯架構消除了層層堆疊的阿貝誤差,HEX150-140HL 展現了業界領先的 20 奈米 (20 nm) XYZ 最小增量運動,以及 0.04 角秒 (arc sec) 的極致旋轉解析度,這種無與倫比的微觀定位能力,確保您的微型星象儀能獲得最純淨、最真實的光學校正環境。

HexGen HEX150-140HL Hexapod 提供高精度六自由度運動,具備超細定位解析度、高負載能力、可負重設計與靈活整合選項,適用於光學檢測、航太測試等應用,可承受最高 7.5 kg 負載,確保穩定與可靠性。
徹底封殺斷電墜落的安全防護:100 牛頓抗反向驅動設計
面對斷電時重力造成的設備墜落風險,HEX150-140HL 在機械底層進行了極度強悍的強化,雖然體積微小,但它能支援高達 7.5 公斤的垂直高荷重能力,更關鍵的是其內部的精密驅動機構具備強大的自鎖特性,能夠 抵抗高達 100 牛頓的反向驅動力量,這意味著即使在測試重型航太微縮模組的途中遭遇廠房完全斷電,這台微型六軸平台依然能將高價值酬載死死鎖定在半空中,絕不發生滑落或砸毀的災難,提供軍規級別的絕對物理防護。
HEX150-140HL 的結構設計精巧,即使在空間有限的環境中,也能提供充足的運動範圍,方便整合到需要精密動作控制的應用中,例如:光學對準、半導體檢測、或科學研究設備。
消滅運算延遲的控制中樞:Automation1 控制與虛擬旋轉中心
為了解決外部 PC 計算逆運動學帶來的通訊延遲與震盪,Aerotech 將 HEX150-140HL 直接整合至強大的 Automation1 智慧型軟體控制器 的底層神經中,Automation1 系統在底層的高頻伺服迴圈中,原生內建了處理六軸並聯運動學的強大演算法,它無需依賴外部網路傳輸,能在微秒之間完成所有的座標矩陣轉換,透過 Automation1,工程師可以極為輕鬆、方便地設定 「虛擬樞紐點調整 (Easy, convenient pivot-point adjustment)」,您只需在軟體中宣告感測器透鏡的中心點,系統就會自動指揮六根支柱,讓整個平台完美地繞著該空間定點進行平滑旋轉,徹底消滅了定位抖動,讓微觀光學測試與對位變得極度穩定且快速。
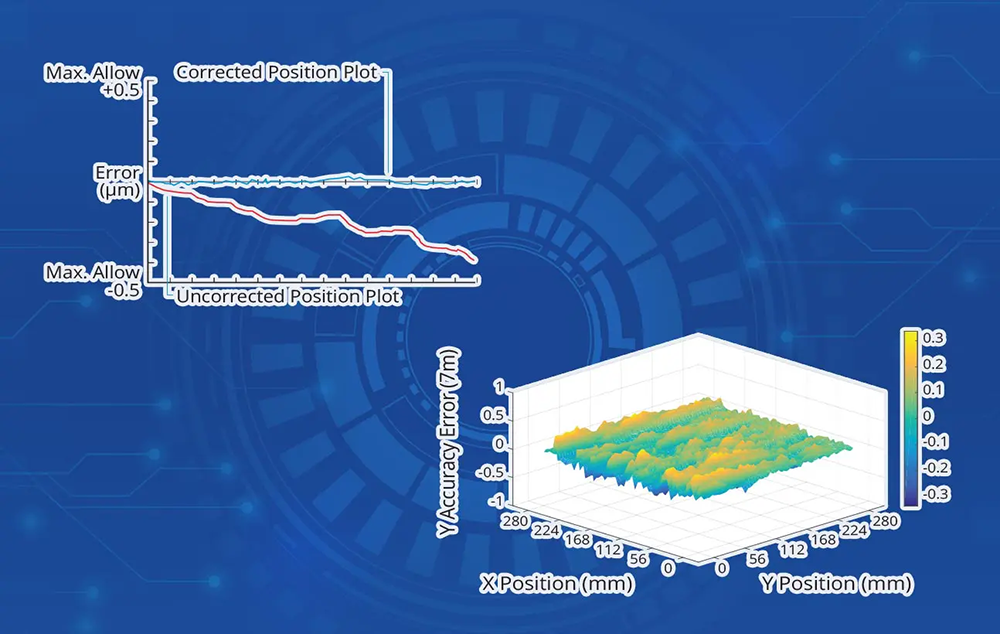
運用量測工具收集線性與角度誤差的相關資料,進而建立校準表,校準數值將會自動套用,且不影響使用者介面中顯示的編程位置,此 iSMC 原生支援 1D、2D 及正交性校準表。
打造頂尖的航太微型感測器與光學晶圓 6-DOF 測試平台沒有單一標準答案,實際的硬體配置將因應您的光學模組重量(如最高 7.5 kg 的荷重需求)、環境測試艙的空間容積(HEX 系統的緊湊尺寸可輕鬆整合),以及無塵室或真空艙的嚴苛防護等級,而由我們為您專案客製。如需針對 HEX150-140HL 微型六軸系統、空間運動學防撞分析或 Automation1 控制系統進行深入的系統架構與客製化評估,請立即聯繫「奧創系統」團隊,我們擁有豐富的航太級微觀多軸動態模擬與客製化系統整合經驗,隨時準備為您提供最專業的建置藍圖。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。