
無縫穿梭虛實之間:混合PNT技術於GNSS弱訊號/拒止環境的測試與驗證挑戰
在一個高度依賴即時、精準時空資訊的時代,從物流追蹤、個人導航、智慧交通到決定自主系統(如自動駕駛車、無人機)安全運行的定位、導航與授時(PNT)服務,已成為現代社會不可或缺的基礎設施。全球導航衛星系統(GNSS)以其全球覆蓋、全天候服務的特性,長期以來扮演著PNT資訊主要提供者的角色。然而,GNSS訊號並非無所不能、無處不在,在深邃的都市峽谷、複雜的室內環境、地下隧道、多層停車場,乃至遭遇無線電干擾(Jamming)或欺騙(Spoofing)攻擊時,微弱的GNSS訊號極易衰減、失真甚至完全中斷,形成PNT服務的「盲區」。
面對這些GNSS弱訊號或拒止環境,單純依賴GNSS的PNT解決方案顯然已捉襟見肘,為實現「任何時間、任何地點」的無縫定位(Ubiquitous Positioning)目標,混合PNT技術應運而生;它透過智慧地融合GNSS與多種輔助/替代感測器及定位技術,力求在GNSS效能下降或失效時,仍能提供連續、可靠的PNT輸出;然而,這種多感測器、多情境感知的複雜系統,其測試與驗證工作也面臨著前所未有的挑戰:如何在實驗室中精確重現GNSS訊號的「淡入淡出」與「完全消失」?如何驗證不同PNT源之間的無縫切換與數據融合演算法的有效性?如何確保系統在極端條件下的穩健性與完整性?本文將深入探討這些核心挑戰,並闡述如何利用先進的模擬與驗證技術來攻克這些難關。
混合PNT技術的崛起與GNSS挑戰環境的深度剖析
何謂混合PNT技術?為何它是實現全場景定位的關鍵?
混合PNT技術的核心思想在於感測器融合(Sensor Fusion),它不依賴單一的PNT來源,而是整合多種不同物理原理、不同特性的感測器和定位技術的觀測數據,透過複雜的估計理論(如卡爾曼濾波、粒子濾波等)進行最佳化融合,以期獲得比任何單一感測器更優的PNT效能。
除了GNSS之外,常見的輔助/替代PNT技術包括:
- 慣性導航系統(INS):
基於慣性測量單元(IMU)(包含加速度計和陀螺儀)進行航位推算(Dead Reckoning, DR),提供短時間內高精度的相對定位與姿態資訊,是GNSS中斷時最主要的PNT接續手段。 - 地面無線定位技術:
如Wi-Fi往返時延(RTT)/接收訊號強度指示(RSSI)指紋定位、藍牙到達角/離開角(AoA/AoD)定位與藍牙信標(Beacon)、超寬頻(UWB)測距與定位,這些技術在室內或GNSS訊號不良區域能提供有效的輔助。 - 視覺里程計(Visual Odometry, VO)與視覺同時定位與地圖構建(Visual SLAM):
利用攝影機捕捉的影像序列來估算載體的運動與姿態,並可同時構建環境地圖。 - 光達里程計(Lidar Odometry)與光達SLAM(Lidar SLAM):
原理類似視覺,但使用光達作為主要感測器。 - 其他感測器:
如氣壓計(輔助高度估算)、磁力計(輔助航向估算)、里程計/輪速感測器(輔助車輛速度與距離估算)。
混合PNT的優勢在於能夠取長補短,例如:
- 提升可用性:在GNSS失效時,其他感測器仍能提供PNT資訊。
- 增強連續性:確保PNT輸出的平滑過渡,避免跳變。
- 改善精度:多感測器數據的融合有助於抑制單一感測器的誤差。
- 提高完整性與可靠性:透過多源數據的一致性檢查,可以更有效地偵測和排除故障。
GNSS弱訊號與拒止環境的典型特徵與對PNT的衝擊
理解這些挑戰環境的特性,是設計有效測試策略的前提:
- 室內/地下環境(商場、機場航廈、地鐵、地下停車場):
GNSS訊號因建築材料的穿透損耗而極度衰減,幾乎不可用;多路徑效應極其嚴重且複雜。 - 深都市峽谷:
高樓林立導致衛星可見性差、幾何分佈(DOP)不佳;訊號被多次反射形成強多路徑干擾;訊號可能頻繁中斷。 - 隧道與多層停車結構:
GNSS訊號完全被遮蔽,PNT系統必須依賴非GNSS感測器(主要是INS)進行長時間的航位推算。 - 蓄意/無意RF干擾環境:
Jamming導致訊號淹沒,Spoofing則可能誘使接收機產生錯誤的PNT結果,這些都會形成事實上的GNSS拒止區。
在這些環境下,單純的GNSS接收機輕則定位精度大幅下降、更新率降低、首次定位時間(TTFF)顯著延長,重則完全無法定位或輸出錯誤的PNT資訊,對依賴PNT的應用(尤其是安全關鍵型應用)構成嚴重威脅。
技術整理表:混合PNT於GNSS挑戰環境的測試驗證核心
GNSS挑戰環境 |
對PNT系統影響 |
混合PNT應對技術 |
核心測試驗證重點 |
對應測試方案技術精髓 |
|
室內/地下(GNSS完全拒止) |
GNSS完全失效;PNT依賴非GNSS感測器 |
GNSS/INS緊密耦合(用於進出時的初始化/重鎖);Wi-Fi/藍牙/UWB定位;視覺/光達SLAM;PDR/VDR |
非GNSS感測器的定位精度、漂移特性、環境適應性;多感測器數據融合演算法的有效性;進入/離開GNSS拒止區時的PNT切換平滑性與GNSS重擷取效能。 |
可程式化GNSS訊號的有/無模擬(XPLORA/CAST);高傳真IMU數據與GNSS同步模擬以驗證DR(CAST GNSS/INS平台);精密物理運動注入(Hexapod)。 |
|
都市峽谷深處(GNSS訊號極弱、多路徑嚴重) |
衛星可見性差、DOP值高;訊號極弱難以鎖定;多路徑誤差巨大 |
高靈敏度GNSS接收技術;先進多路徑抑制演算法;GNSS/INS緊密耦合;視覺/光達輔助。 |
在弱訊號與強多路徑下的定位精度、可用性與連續性;多路徑效應的抑制能力;GNSS/INS融合後PNT的穩健性。 |
精確控制GNSS訊號功率位準;高傳真都市多路徑與遮蔽通道模擬(ACE Client);GNSS與IMU數據融合模擬(CAST GNSS/INS平台)。 |
|
隧道/多層停車場(GNSS長時間中斷) |
GNSS完全失效,需長時間依賴DR或其它技術 |
高性能INS/IMU;輪速/里程計輔助DR;地磁/氣壓計輔助;地圖匹配。 |
長時間航位推算(DR)的精度與漂移控制;GNSS重擷取時間與位置精度(出隧道後)。 |
模擬GNSS訊號的長時間中斷與恢復;高精度IMU數據模擬以評估DR效能(CAST GNSS/INS平台);Hexapod物理運動注入以驗證真實IMU在DR期間的表現。 |
|
RF干擾/欺騙區域(GNSS訊號不可信/不可用) |
PNT遭誤導或服務中斷 |
抗干擾(AJ)天線/演算法;抗欺騙(AS)技術(如訊號認證、異常檢測);多感測器交叉驗證;快速切換至備用PNT源。 |
干擾/欺騙偵測與告警能力;受攻擊下的PNT誤差;攻擊消除後的恢復時間與精度;備用PNT系統的啟動與效能。 |
可控干擾/欺騙環境生成(GNSS導航干擾模擬系統, NavTD-M23);GNSS模擬與威脅注入同步;GIDAS用於監測受測物反應。 |
攻克混合PNT測試難關-先進模擬與驗證方法學的「庖丁解牛」之術
要馴服混合PNT這頭「多感測器巨獸」,並確保其在GNSS訊號幽明變幻的「虛實之間」遊刃有餘,一套能夠精確複現各種極端邊緣場景的先進模擬與驗證方法學不可或缺;這不僅僅是單個感測器的測試,更是對複雜數據融合演算法、狀態估計邏輯以及系統故障轉移機制的終極拷問。
精確模擬GNSS訊號的「淡入淡出」與「完全消失」:考驗PNT系統的切換與重擷取智慧
混合PNT系統的關鍵能力之一,是在GNSS可用性發生變化時的平滑過渡與高效重啟,利用先進的GNSS模擬器,如XPLORA Pro、XPLORA One、CAST 1000可攜式雙頻GNSS模擬器或CSAT-GNSS射頻訊號建模與模擬系統,可以在實驗室中精確控制:
- GNSS訊號功率的動態衰減與增強:
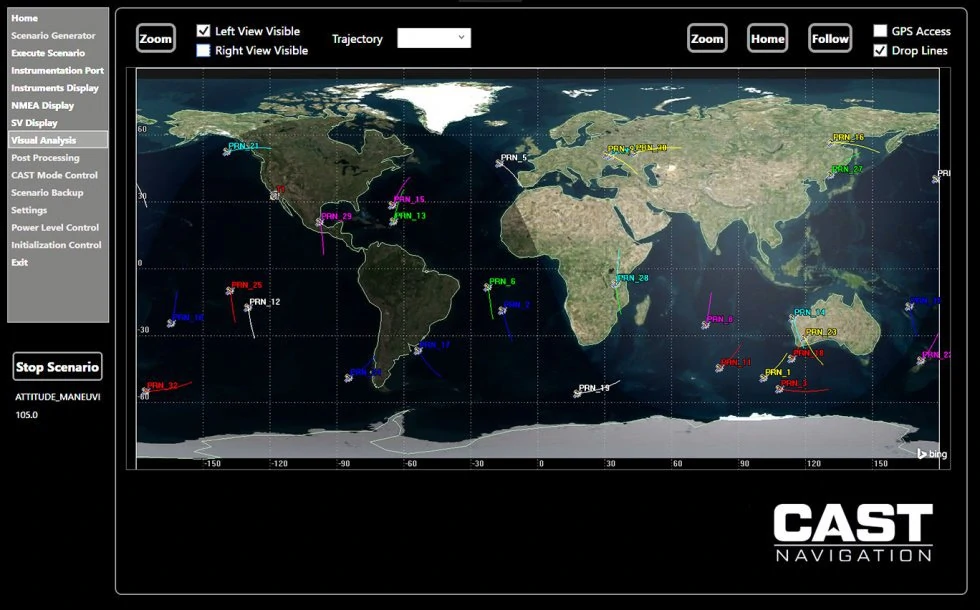
模擬載具駛入建築物遮蔽區(訊號逐漸減弱至消失)或駛出遮蔽區(訊號逐漸恢復)的過程。 - 可見衛星數量的程式化控制:
模擬由於都市峽谷或室內環境造成的衛星數量急劇變化。 - GNSS訊號的完全中斷與按需恢復:
測試系統在GNSS完全丟失後,其他PNT源能否可靠接管,以及GNSS恢復後能否快速重擷取並重新參與融合解算。 這些測試對於評估混合PNT系統的狀態轉換邏輯、GNSS重擷取演算法(TTFF after outage)以及整體PNT輸出連續性至關重要。
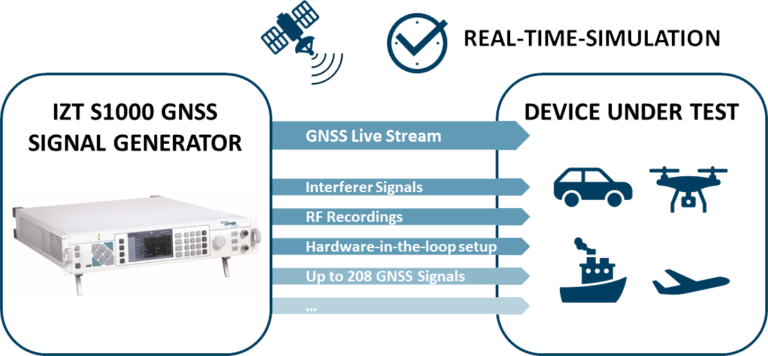
先進的GNSS模擬解決方案(如基於XPLORA或CAST平台)能夠精確控制模擬GNSS訊號的有/無、強/弱,是混合PNT系統在GNSS挑戰環境下切換與重擷取效能驗證的基礎。

利用GNSS模擬器如XPLORA One,可以精心構建特定的GNSS訊號場景,例如:模擬在GNSS弱訊號或部分遮蔽環境下,混合PNT系統的啟動與過渡行為。
GNSS/INS融合系統的全鏈路模擬與驗證:慣性導航的「獨舞」與「協奏」
在GNSS訊號不可用時,INS通常是維持PNT連續性的中流砥柱,對GNSS/INS融合系統的測試,需要對兩者的輸入進行同步且精確的模擬:
- 高傳真IMU數據與GNSS訊號的同步模擬:
GNSS/INS整合模擬平台,如CAST GNSS/INS即時模擬平台,能夠根據同一預設運動軌跡,同時產生時間高度同步的GNSS RF訊號和IMU感測器輸出數據(如角增量Δθ和速度增量Δv),並注入各種IMU誤差模型(偏置、尺度因子、雜訊等),這使得能夠在實驗室中全面評估GNSS/INS融合演算法(如擴展卡爾曼濾波EKF)的效能,特別是在模擬的GNSS訊號中斷期間,航位推算(Dead Reckoning)的精度、誤差累積特性以及漂移控制能力。 - 物理運動注入的極致真實性:
對於需要驗證包含真實IMU硬體的整個GNSS/INS單元在動態物理運動下的反應,則可採用硬體在環(HIL)的測試方法,將待測單元安裝於高精度六軸運動平台(Hexapod)上,由Hexapod施加預設的六自由度物理運動,同時GNSS模擬器向其天線饋入對應的模擬衛星訊號。這種方式能夠最真實地考驗IMU感測器的動態響應、GNSS天線的相位中心變化影響,以及整個系統在真實物理應力下的PNT解算穩健性。
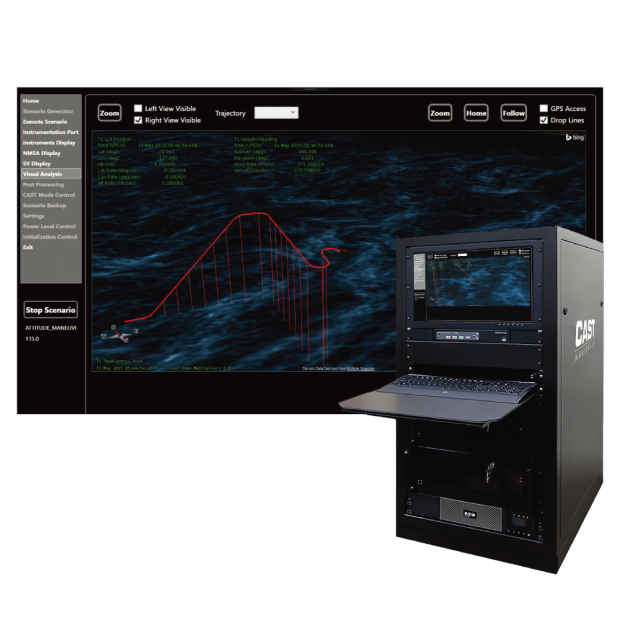
CAST GNSS/INS即時模擬平台是驗證GNSS與INS深度融合演算法的關鍵工具,能夠同步模擬高動態環境下的GNSS訊號與IMU感測器數據。
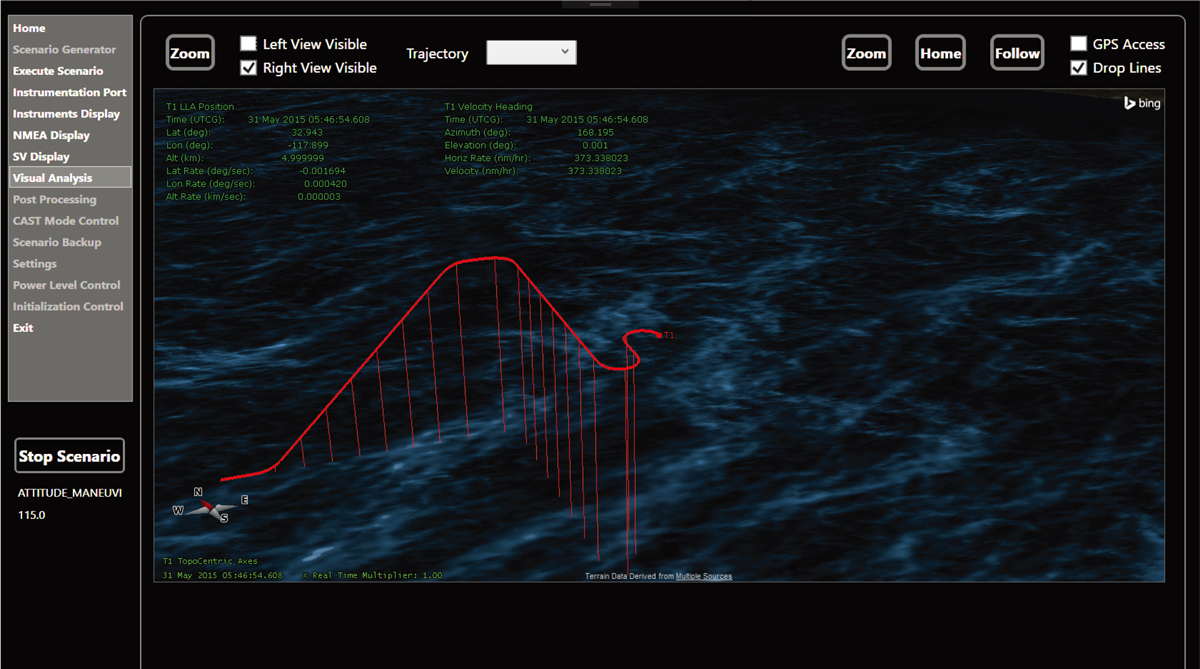
先進的GNSS/INS模擬系統,能夠即時呈現複雜的六自由度運動軌跡,並同步輸出對應的GNSS RF訊號與IMU數據,用於測試自主系統在各種飛行或地面載具平台上的導航效能。
塑造逼真的GNSS弱訊號與多路徑環境:通道模擬的精雕細琢
即便GNSS訊號可用,在都市或室內邊緣等弱訊號區域,其品質也可能因複雜的傳播路徑而嚴重劣化;進階RF通道模擬器,如ACE Client進階通道模擬器或ACE9600(可搭配如DBM ACE Plugin for STK等工具進行場景建模),專門用於在實驗室中重現這些挑戰:
- 模擬室內穿透損耗與深度衰落:
精確模擬GNSS訊號穿透建築材料(牆壁、玻璃、樓板)時發生的顯著功率衰減。 - 再現複雜的多路徑干擾:
基於統計性或確定性通道模型,產生大量具有不同延遲、幅度和相位的反射/繞射/散射訊號分量,模擬深都市峽谷或室內環境中常見的強多路徑效應。 - 測試混合PNT系統中GNSS部分的殘餘貢獻:
即使在GNSS訊號極弱、多路徑極其嚴重的情況下,某些高靈敏度接收機或先進的融合演算法仍可能從中提取有用的資訊(哪怕只是粗略的時間或頻率參考);通道模擬器可以幫助精確評估這種「殘餘貢獻」的邊界條件。
構建可控的GNSS拒止(干擾/欺騙)測試場景:考驗系統的「免疫力」
在GNSS拒止場景中,混合PNT系統能否及時偵測到GNSS的不可用或不可信,並順利切換到其他輔助PNT源,是其穩健性的關鍵體現,利用GNSS導航干擾模擬系統或NavTD-M23導航威脅偵測/模擬器,可以:
- 產生多樣化的Jamming環境:
模擬不同類型、不同功率的干擾訊號,迫使GNSS接收部分或完全失效,從而驗證混合PNT系統的故障轉移(Failover)機制以及備用PNT源的啟動時間與初始效能。 - 注入可控的Spoofing攻擊:
測試系統對GNSS欺騙的偵測能力,以及在偵測到欺騙後,能否有效隔離偽造訊號,並依賴其他可信感測器維持PNT的完整性。
GNSS干擾與欺騙模擬系統的架構示意,其核心在於產生可控的惡意RF訊號,與正常的GNSS模擬訊號疊加,用於測試混合PNT系統在GNSS受攻擊時的應對與防護能力。
真實世界數據採集對混合PNT驗證的輔助價值:連接虛擬與現實的紐帶
雖然實驗室模擬提供了無與倫比的可控性與可重複性,但真實世界總有其獨特的複雜性,使用如GIDAS系列干擾偵測與分析系統或XPLORA-Trace記錄與分析方案等工具,在特定的GNSS挑戰區域(如已知的大型室內場所、特定干擾熱點區域)進行實地數據採集:
- 可以獲取該區域獨特的RF頻譜特徵、干擾模式、多路徑分佈等,這些數據可以反過來指導和優化實驗室模擬的參數設定,使其更貼近「目標現實」。
- 可以作為獨立的測試向量,用於驗證混合PNT系統在特定已知困難點的實際表現。
- 可以幫助識別實驗室模擬中可能未能完全覆蓋的未知RF現象。

利用如GIDAS-Portable這樣的設備在真實GNSS挑戰環境(如都市或室內)進行訊號監測與數據採集,可以為混合PNT系統的實驗室驗證提供寶貴的現實參照。
從實驗室到真實世界-以全維度測試技術鑄就混合PNT的「無縫之境」
實現全場景、全天候、無縫隙的PNT服務,是現代社會對導航技術的終極期盼,而混合PNT技術正是通往這一目標的關鍵橋樑;然而,這座橋樑的穩健性與可靠性,必須經歷千錘百鍊的測試與驗證,尤其是在GNSS訊號轉弱、受擾、甚至完全消失的「灰色地帶」與「黑暗區域」。
本文深入探討的先進模擬與驗證方法學——從利用XPLORA系列、CAST 1000、CSAT-GNSS等GNSS模擬器精確控制衛星訊號的「有與無」、「強與弱」;到透過CAST GNSS/INS平台與Hexapod六軸運動平台實現GNSS與INS數據在數位域及物理域的高傳真同步模擬;再藉由ACE Client進階通道模擬器細膩刻畫GNSS弱訊號環境下的複雜傳播特性;乃至運用GNSS導航干擾模擬系統構築可控的GNSS拒止測試場景——這一整套技術鏈條,使得在實驗室中對混合PNT系統進行全鏈路、多維度、極限條件下的效能與可靠性驗證成為可能;而GIDAS系列等實場數據採集工具則為模擬的真實性提供了校準與閉環的依據。
展望未來,混合PNT技術將朝向更深度的多感測器融合(納入更多如視覺、光達、5G/6G網路定位等資訊源)、更智慧化的情境感知與自適應融合演算法、以及更高級別的功能安全與預期功能安全(FuSa/SOTIF)設計與驗證方向發展;這對測試技術提出了持續創新的要求,例如:需要能夠模擬更多種類感測器輸入、更複雜的多感測器協同失效模式、以及基於AI的智慧化測試案例生成等。
駕馭這些複雜的測試挑戰,需要深厚的技術積累與專業的整合能力,奧創系統 (Ultrontek) 致力於為亞太地區的客戶提供頂尖的PNT測試與驗證解決方案,憑藉其全面的產品組合(涵蓋從GNSS/INS模擬、RF通道模擬、干擾模擬到精密運動模擬的各個環節)以及豐富的系統整合與客製化服務經驗,奧創系統能夠為客戶在混合PNT技術研發、自主系統導航驗證、室內外無縫定位等前沿領域,提供從單點儀器到複雜HIL測試平台的端到端支援。
若您正投身於探索PNT技術的「無人之境」,或對如何在GNSS弱訊號/拒止環境下確保混合PNT系統的卓越效能與絕對可靠有任何技術挑戰與解決方案需求,歡迎隨時與奧創系統 (Ultrontek) 的專家團隊進行深度交流,共同擘劃PNT技術「無縫穿梭虛實之間」的廣闊未來。