
利用 HIL 架構實現 6+2 軸物理機動與 GNSS 動態遮蔽的微秒級同步
在現代導航戰(Navigation Warfare, NAVWAR)與自動駕駛的高階驗證中,一個常被忽視但至關重要的物理現象是:「姿態決定視野」,當一輛戰術車輛在崎嶇路面劇烈顛簸,或一架無人機在城市峽谷中大角度側飛時,其天線相對於天空的指向會瞬間改變,這表示原本可見的衛星可能會被車體自身的結構(如砲塔、尾翼)遮擋,或者被周遭的建築物瞬間阻斷。
傳統的測試將「運動」與「訊號」分開:振動台只負責搖晃,GNSS 模擬器只負責跑軌跡,這種割裂的測試無法重現「動態遮蔽」(Dynamic Obscuration)——即當載台物理上發生傾斜(Roll/Pitch)時,衛星訊號是否同步發生中斷?如果物理上車子向左傾斜 15 度,但模擬的 RF 訊號沒有同步改變接收場型,導航濾波器(Kalman Filter)就會接收到錯誤的觀測值,導致位置發散。
為了解決此一「時空斷裂」難題,工程界引入了結合「6+2 軸複合運動平台」與「即時硬體在環(HIL)」的整合架構,本文將深入解析如何透過 EtherCAT 實時通訊骨幹,將物理層的機械運動與訊號層的遮蔽模型進行微秒級(Microsecond-level)的鎖定,構建全域動態驗證場域。

系統架構:頻率、空間與訊號的三位一體
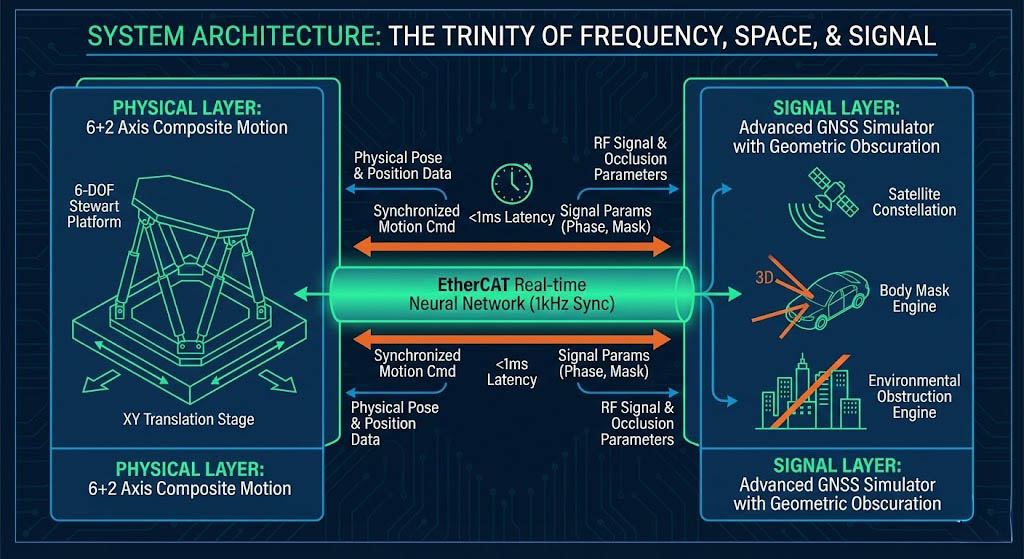
要實現物理與訊號的完美同步,系統必須由三個核心子系統組成,並透過統一的時脈進行指揮。
物理層:6+2 軸複合運動機構
此層負責重現載台的真實物理狀態。
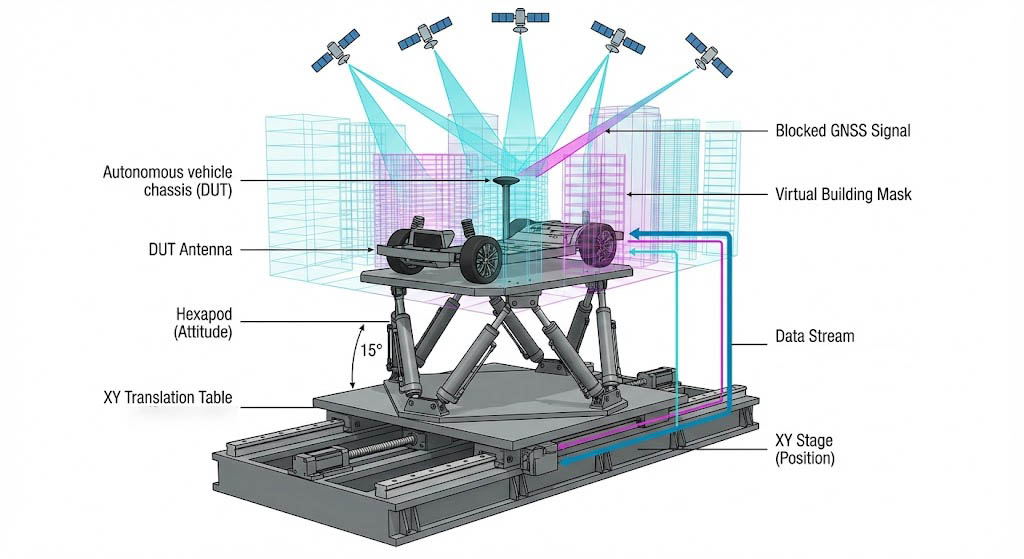
- XY 平移平台:負責模擬載台在虛擬地圖上的絕對位置變化(如穿越十字路口),其 ±1 公尺的大行程能模擬車輛的過彎側滑(Skid)或變換車道。
- 六軸史都華平台:疊加於 XY 軸之上,負責模擬載台的姿態(Attitude),例如,當車輛駛上路沿石(Curb)時產生的瞬間 10 度側傾。
訊號層:具備幾何遮蔽運算的 GNSS 模擬器
此層的核心在於OHB XPLORA 或 CAST Navigation 這類高階模擬器,它們不僅產生射頻訊號,更內建了複雜的幾何運算引擎:
- 車體遮蔽(Body Mask):定義載台自身的 3D 模型(如機翼、砲塔),當平台模擬俯仰(Pitch)動作時,模擬器會即時計算天線是否被自身結構遮擋。
- 環境遮蔽(Vertical Obstacles):定義虛擬城市中的建築物高度與位置,當 XY 平台移動時,模擬器會計算視線(Line-of-Sight, LOS)是否被建築物截斷。
連結層:EtherCAT 實時神經網路
這是同步的關鍵,系統採用 EtherCAT 作為通訊骨幹,以 1kHz(每毫秒一次)甚至更高的頻率,同步傳輸「運動指令」與「訊號參數」,這確保了當機械手臂動作的瞬間,射頻訊號的相位與遮蔽狀態也在同一毫秒內發生變化,消除了「運動-光子延遲」(Motion-to-Photon Latency)。
核心技術解析:如何同步「物理傾角」與「虛擬遮蔽」?
同步並非單純的觸發(Trigger),而是連續的狀態耦合,以下是從物理動作到訊號遮蔽的完整數據鏈路解析。
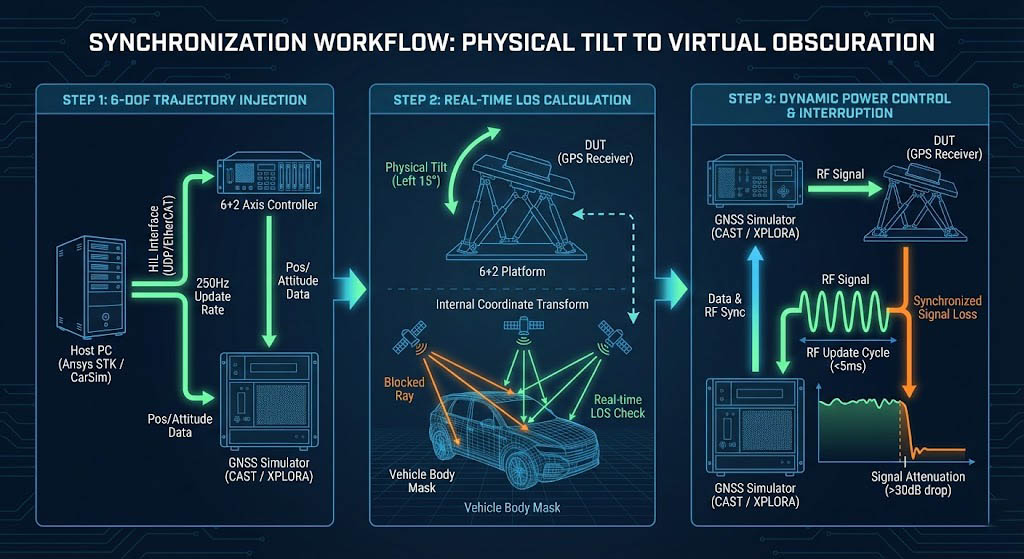
步驟一:6-DOF 軌跡注入 (Trajectory Injection)
測試開始時,主控電腦(Host PC)運行著虛擬場景(如 Ansys STK 或 CarSim),它計算出載台在每一時刻的 位置(Lat, Lon, Alt) 與 姿態(Roll, Pitch, Yaw),這些數據透過 HIL 介面(如 UDP 或 EtherCAT)即時發送給 6+2 軸控制器與 GNSS 模擬器,重點在於,CAST 或 XPLORA 模擬器 支援 「遠端運動介面」(Remote Motion Interface),能以高達 250Hz 的更新率接收這些外部軌跡數據。
步驟二:即時視線運算 (Real-time LOS Calculation)
當 6+2 平台的六軸機構執行一個「向左側傾 15 度」的動作時,GNSS 模擬器內部會同步執行座標變換:
- 旋轉天線座標系:模擬器將虛擬天線的接收場型(Antenna Pattern)向左旋轉 15 度。
- 重新計算可見性:系統檢查此時的衛星視線(LOS)。原本位於右側低仰角的衛星,可能因為天線向左傾斜而被車體右側的結構(Body Mask)遮擋;或者原本被左側大樓擋住的衛星,因為車體傾斜而露出來。
步驟三:動態功率控制與中斷
一旦計算出某顆衛星被遮蔽,模擬器會在下一個 RF 更新週期(通常 < 5ms)內,將該衛星的訊號功率瞬間衰減(例如降低 30dB 或直接關閉),這使得安裝在 6+2 平台上的真實 GPS 接收機(DUT),在感受到物理傾斜的同時,也精確地失去了對應方向的衛星訊號,這種「體感與視覺的一致性」是驗證感測器融合演算法(Sensor Fusion)的絕對前提。
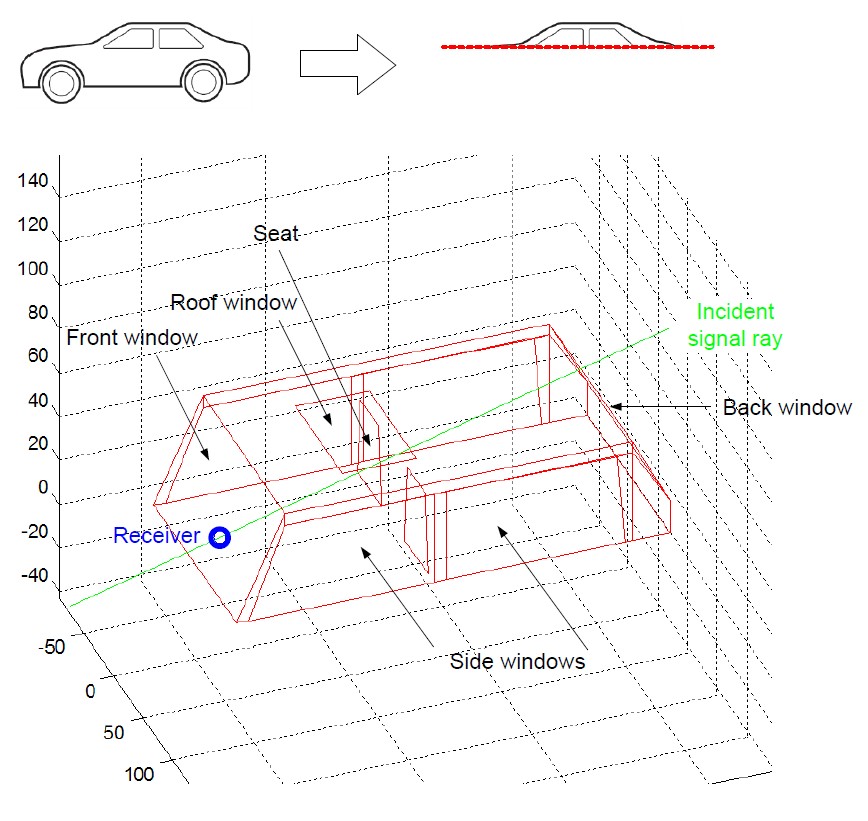
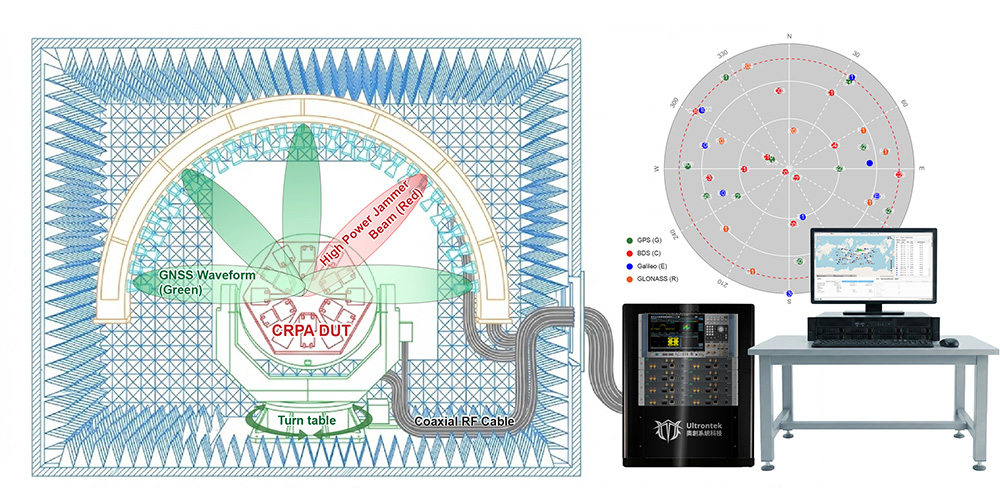
車體遮蔽罩(Body Mask)模型示意圖,在 HIL 測試中,隨著 6+2 平台模擬車輛姿態改變,不同角度的衛星訊號將被動態遮蔽。
關鍵應用場景:驗證「迷航」邊界
透過上述架構,工程師可以在實驗室內重現極端危險的邊界測試。
場景一:戰術車輛的側傾與訊號丟失
想像一輛裝甲車在城市廢墟中高速轉彎並駛過瓦礫堆。
- 物理動作:XY 平台模擬轉彎離心力,六軸平台模擬車身劇烈側傾(Roll)。
- 訊號同步:隨著車身側傾,原本被高樓遮蔽的一側天空突然暴露,而另一側則被自身砲塔遮擋。
- 驗證目標:測試導航電腦能否在衛星星座(Constellation)瞬間劇烈變化的情況下(例如 PDOP 值突然飆高),利用 IMU 的慣性數據維持定位精度,而不會發生位置跳變(Position Jump)。
場景二:艦載系統的動態遮蔽
軍艦的上層結構(桅桿、雷達罩)是巨大的遮蔽源。
- 物理動作:6+2 平台模擬 5 級海象下的船體搖晃(Roll/Pitch ±15°)。
- 訊號同步:設定模擬器的 Body Mask 為艦艇上層結構,隨著平台搖晃,衛星訊號會呈現週期性的遮蔽與恢復(Intermittent Signal)。
- 驗證目標:驗證接收機的重獲取時間(Reacquisition Time),當訊號因船體搖晃而短暫中斷後,接收機多快能重新鎖定?這對於無人機降落導引至關重要。

技術挑戰與解決方案:對抗延遲
在 HIL 系統中,最大的敵人是延遲(Latency),如果平台已經向左傾斜了,但 200ms 後 GPS 訊號才斷掉,受測的導航電腦會判定感測器數據不一致(Inconsistency),導致測試失敗。
前饋補償 (Feed-forward Compensation)
為了將端對端延遲控制在容許範圍(通常 < 10ms)內,奧創系統的整合方案採用前饋控制策略,實時控制器會預測下一個時間步長(Time Step)的運動狀態,並提前發送訊號指令給 GNSS 模擬器,以抵消硬體運算與傳輸的固有延遲,這確保了物理運動到達峰值的瞬間,RF 訊號的變化也剛好發生。
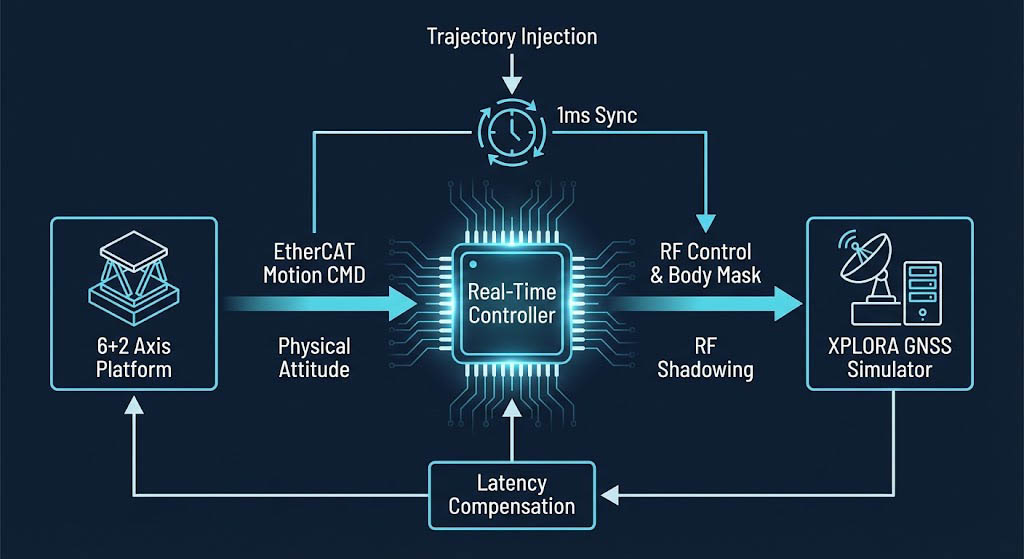
全域動態 HIL 系統架構圖,展示實時控制器如何透過 EtherCAT 同步驅動運動平台與 RF 訊號生成,實現微秒級同步。
定義動態生存率的黃金標準
總結來說,透過將「6+2 軸複合運動平台」與「具備遮蔽運算的 GNSS 模擬器」進行深度 HIL 整合,我們不再只是測試接收機的靈敏度,而是在驗證整個導航系統在物理極限狀態下的生存邏輯,這種架構讓工程師得以在實驗室內,反覆執行「高速過彎遮蔽」、「艦體搖晃斷訊」等高風險測試,確保未來的無人載具與戰術裝備,在面對真實戰場的動態混沌時,仍能保持冷靜、精準的導航能力。
針對高階導航戰與載具動態驗證,奧創系統科技(Ultrontek) 提供了完整的整合式解決方案:
- 物理層:
整合 SANLAB SMotion 系列高動態 6+2 軸平台,具備優異的 EtherCAT 介面與高頻寬響應。 - 訊號層:
整合 OHB XPLORA 與 CAST Navigation 高階模擬器,特別推薦 XPLORA Pro,其支援高達 250Hz 的 HIL 更新率與精細的 Body Mask 編輯功能,能完美對應高動態遮蔽測試。 - 同步核心:
奧創自主整合的 Real-time HIL 解決方案,能處理微秒級的運動與 RF 同步,並支援 ACE9600 通道模擬器與 R&S 電子戰測試設備的擴充,為客戶打造國防級的全域動態驗證實驗室。
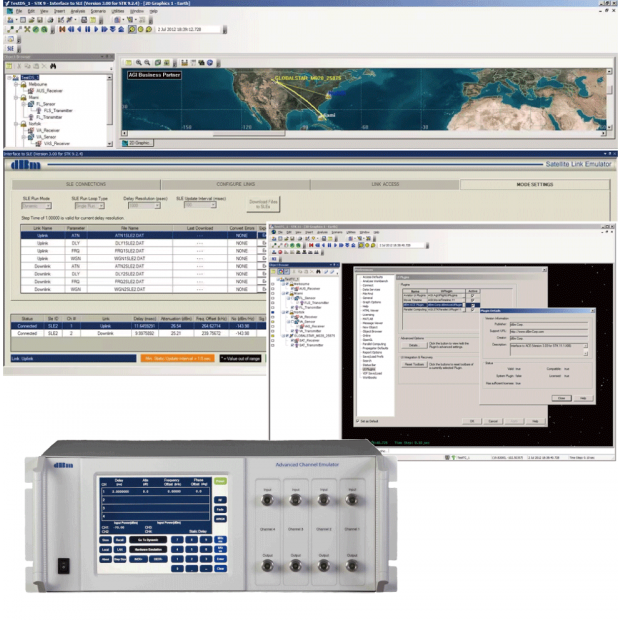
ACE9600 是一款高精度衛星通訊與無線通訊通道模擬器,支援 600 MHz 瞬時頻寬、RF 鏈路模擬、多重路徑衰減與動態環境測試,適用於 LEO/MEO/GEO 衛星、UAV、車載與船舶通訊驗證,並提供遠端控制與可擴展頻率架構
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008