
雙載台平行控制與線性平衡環 (Linear/Gimbal) 系統之動態干擾解析
在先進製造版圖中,不論是應對龐大運算需求的並行式微電子封裝(Parallel Micro-assembly),或是針對航太級渦輪葉片與大型電動車光達(LiDAR)感測器陣列的 3D 空間非破壞性檢測(NDT),工程團隊正面臨著兩種截然不同、卻同樣極端的力學挑戰:「在極限空間內將產能翻倍」以及「在長行程中精準翻轉重型負載」。
長期參與國家級大型自動化建置與高階精密力學系統評估,當我們檢視最新的產線佈局與品質檢驗標準時,會發現一個殘酷的物理學現實:傳統的單一工作站或簡單的線性疊加旋轉台,已經無法滿足現代製程對「時間效率」與「三維空間純度」的雙重苛求,當工程師試圖在同一條軌道上放上兩個高速運動的載台以提升產能,或是將一個巨大的平衡環安裝在長行程線性滑台上以檢測五十公斤重的航太零件時,隨之而來的結構共振、慣性力矩偏移與極端動態干擾,往往會讓整個系統的精度瞬間崩潰;本文將純粹從結構動力學、牛頓反作用力以及多體運動學的底層邏輯出發,深度剖析現代客製化系統工程師在實務上所遭遇的嚴苛法規與三大核心技術難題。
國際高階製造與檢驗規範:產量與重載 3D 空間的極限容忍度
在探討具體的機構與控制痛點之前,我們必須先理解指導這些次世代製造與檢測設備的最高準則,以最新國際航太品質管理系統(AS9100 Rev E 針對大型複雜幾何零件的檢測附錄),以及 IPC-A-610 高密度電子組裝平行製程規範為例,對於機台在三維空間中的「動態剛性」與「平行處理獨立性」提出了近乎物理極限的要求。
首先,在平行微製造領域(如微透鏡陣列的雙軌同時點膠或高精度拾放),規範要求在同一個機台基座上同時運行的兩組加工頭,即使各自以每秒兩公尺(2 m/s)的高速與高達三個G(3G)的加速度進行完全不規則、非同步的激烈加減速,兩個加工端點(Tool Center Points)之間的相對循跡誤差變異仍必須控制在次微米(Sub-micron)級別,任何因為其中一個載台急停所產生的震波傳遞給另一個載台,都會導致良率的毀滅性下降。
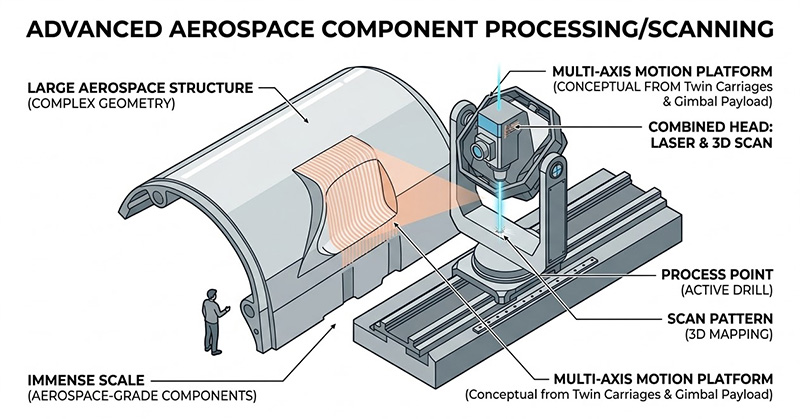
其次在大型航太部件的 3D 空間掃描或雷射加工中,規範要求必須能夠對重達五十公斤以上的複雜幾何物體進行連續無死角的處理,這意味著檢測系統必須具備長達數公尺的線性掃描能力,同時結合連續三百六十度旋轉與一百八十度傾斜的空間翻轉能力,法規規定,在重物進行大角度傾斜並伴隨高速線性移動時,其空間絕對定位誤差與角度偏擺(Pitch/Yaw)必須被壓制在幾個角秒(Arc-seconds)以內,這種「極限平行通量」與「巨大慣量 3D 複合運動」的要求,直接宣判了傳統標準型滑台與拼裝式轉台的死刑。
三大複合運動難題
在上述嚴苛的物理限制與法規框架下,研發與設備工程師在建構雙載台系統或重載線性平衡環系統時,無可避免地會面臨三道極難跨越的技術高牆。這三大難題分別牽涉到共用基座的結構串擾、重載傾斜時的動態重心偏移,以及雙體運動下的底層電氣與通訊頻寬極限。
雙載台共用基座的「反作用力串擾」
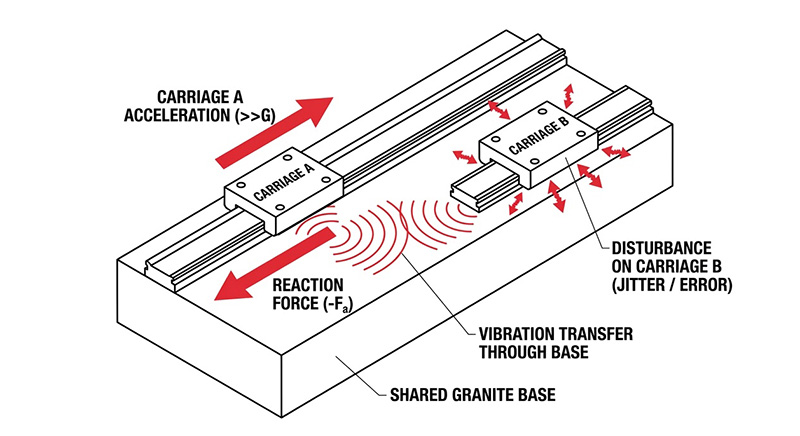
為了解決無塵室廠房空間昂貴的問題,將兩個獨立的線性載台安裝在同一個共用基座與定子(Stator)軌道上(即 Dual Carriage 設計),是實現產能翻倍且節省佔地面積的最佳幾何拓撲。然而,這在物理學上引發了極為嚴重的「反作用力串擾」災難。
根據牛頓第三運動定律,當載台 A 進行高達 3G 的猛烈加速時,它會對底層的共用花崗岩或金屬基座施加一個巨大且方向相反的衝擊力。這個衝擊力會在基座內部激發出高頻的機械震波,由於載台 B 就處於同一個基座上,這個震波會透過導軌與軸承,直接傳遞並干擾正在執行精密加工或微小循跡的載台 B。
在傳統的控制架構中,載台 A 與載台 B 的伺服迴路是各自獨立的,當載台 B 受到來自載台 A 的震動干擾時,載台 B 的控制器只能將其視為「未知的外部雜訊」並試圖進行被動的誤差補償,但由於機械震波的傳遞速度極快且頻譜複雜,這種被動補償往往會產生時間延遲(Phase Lag),導致載台 B 在原地產生數十微米的激烈抖動(Jitter),如果無法在力學結構設計上進行極致的減震與高剛性處理,並在控制底層實現將載台 A 的動態向量即時前饋(Feedforward)給載台 B 進行主動抵銷,這種共用基座的平行加工系統將永遠無法達到微米級的穩定度。
線性平衡環在長行程中的「動態重心偏移」與阿貝放大效應
當應用場景轉向大型航太零件或複合材料的 3D 雷射加工與檢測時,工程師需要一個能提供一百八十度傾斜(Tilt)與三百六十度連續旋轉的平衡環(Gimbal),並將其安裝在一個長行程的線性滑台上。
這裡面臨的終極力學噩夢是「動態重心(CoM)偏移」與力矩極限,當一個重達五十公斤的非對稱待測物被安裝在平衡環上,並被傾斜到九十度(水平狀態)時,整個系統的重心會嚴重偏離線性滑台的物理幾何中心,這個巨大的懸臂重量,會對底層的線性滑台導軌與軸承產生極為巨大的滾轉(Roll)與俯仰(Pitch)力矩(Moment Load)。
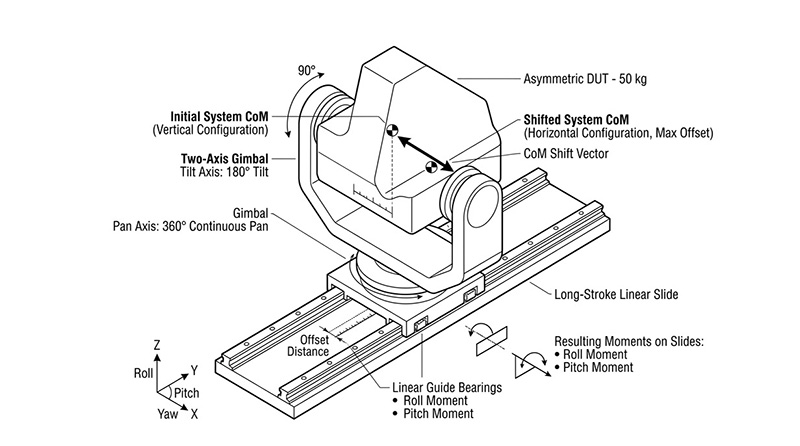
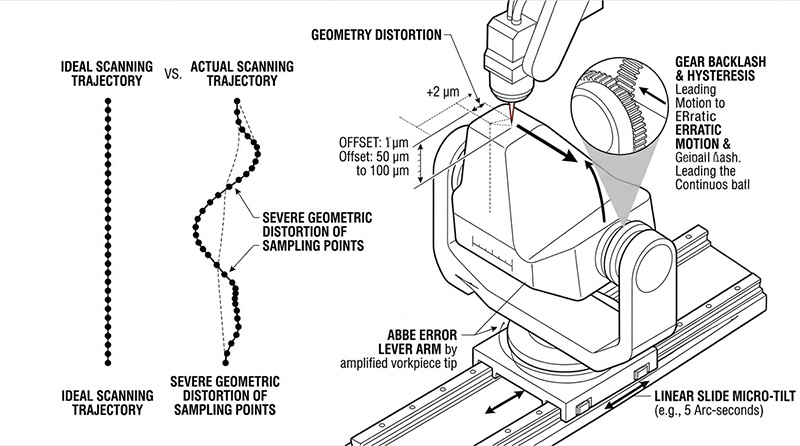
隨著底層線性滑台開始以每秒數公尺的速度移動並進行加減速,這個懸臂負載會產生巨大的慣性反作用力,傳統的機械軸承與滾珠螺桿在承受如此龐大且不對稱的動態力矩時,會產生微觀的彈性形變,更致命的是,因為平衡環結構具有一定的高度,底層線性導軌上哪怕只有幾個角秒(Arc-seconds)的微小變形,經過「阿貝誤差(Abbe Error)」的力臂放大效應後,在五十公斤待測物的頂端,將會產生數十甚至上百微米的絕對空間座標偏移。
此外,傳統基於齒輪或蝸輪蝸桿驅動的重載平衡環,在承受如此龐大負載時,其齒輪咬合面會產生嚴重的機械遲滯(Hysteresis)與背隙(Backlash),根本無法在一百八十度的傾斜過程中維持平滑、等速的連續掃描軌跡,這會導致檢測感測器(如超音波探頭或雷射位移計)的取樣點在三維空間中產生嚴重的幾何扭曲。
多體運動與極限伺服的時域通訊與電磁干擾瓶頸
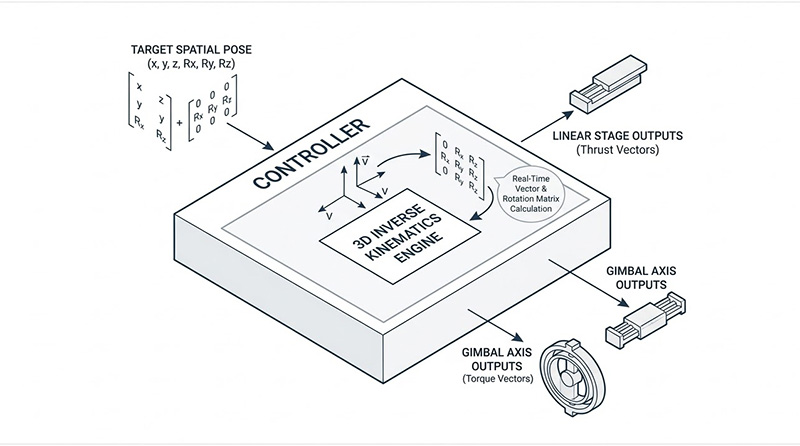
不論是雙載台系統還是線性平衡環系統,其共同的控制難題都在於「多維度大資料量的絕對時間同步」,在雙載台系統中,控制器必須同時處理兩組高解析度編碼器的訊號,並以高達每秒兩萬次(20 kHz)的頻率分別計算兩個載台的獨立電流輸出;在線性平衡環系統中,控制器則需要即時運算包含線性向量與空間旋轉矩陣的三維逆運動學。
在這些客製化且複雜的系統中,若採用傳統的串聯式通訊匯流排,巨量的控制封包無可避免地會面臨網路頻寬的極限與非確定性的時基抖動(Jitter),當系統試圖讓兩個獨立載台進行完美的協同避碰(Collision Avoidance),或是讓線性軸與平衡環旋轉軸在空間中畫出一個完美的 3D 螺旋軌跡時,幾微秒的通訊延遲,就會導致運動軌跡的相位錯亂。
同時,由於這類系統都需要極大的驅動電流(例如推動 50kg 負載的直驅馬達,或同時驅動兩組高達 3G 加速度的線性馬達),傳統 PWM 驅動器的高頻開關切換會產生強烈的電磁干擾(EMI)與電流漣波,在空間極度緊湊的機台內部,這些 EMI 雜訊會輕易耦合到相鄰的精密光學尺或感測器回饋線路中,使得原本預期達到奈米級的控制訊號瞬間被雜訊淹沒,導致系統陷入不穩定的震盪之中。
單一維度思維與標準品的徹底失效
總結上述的結構動力學、慣性力矩偏移與通訊控制分析,我們可以得出一個嚴格的結論:在面對產能翻倍的平行加工需求,以及重載複雜幾何的 3D 空間檢測需求時,傳統依賴「購買兩個獨立滑台並排」或是「將標準轉台硬鎖在標準線性軸上」的拼裝式(Box Moving)設計思維,已經達到了物理學與控制學的死胡同,無論上位機的軟體演算法多麼先進,都無法挽救底層因為共用基座反作用力造成的結構抖動,以及因為重心偏移與阿貝放大效應導致的三維空間崩塌,要突破這道次世代先進製造與檢測的高牆,唯一的解答是從機構的底層直驅力學設計、一體化的客製化幾何工程,到頂層的光纖無延遲通訊總線,進行徹底的「系統級(System-level)」典範轉移。
面對上述嚴苛的 AS9100 與 IPC 平行組裝測試標準,奧創系統推薦導入 Aerotech 專為極端應用量身打造的高階複合運動系統與 Automation1 控制架構,我們能有效協助客戶克服物理極限,實質翻轉高通量製造與重型檢測的產能:
突破平行處理極限:雙載台線性定位系統 (Dual Carriage Linear Positioner)
高精度線性與平衡旋轉台系統,支援 360° 連續旋轉與 180° 傾斜控制,搭載高負載直驅旋轉軸與長行程線性馬達驅動,適用於精密製造與高負載測試;奧創系統 (UltronTek) 提供即時技術支援,助力台灣產業邁向自動化與高效能生產。
針對無塵室空間受限與產能翻倍的需求,我們提供客製化 Aerotech 雙載台線性定位系統 (Dual Carriage Linear Positioner),這套系統採用了創新的「雙獨立載台共用高剛性基座軸」設計,為了徹底消滅反作用力串擾,系統全面採用無鐵心直接驅動(Direct-drive)線性馬達,實現零摩擦與無背隙的極致動力,搭配精密調校的機械軸承與底座阻尼技術,它能確保兩個載台即便在同一軌道上分別以 2 m/s 的高速與 3G 的猛烈加速度進行獨立非同步運動,也能將結構干擾降至最低,更重要的是,透過 Automation1 控制器內建的先進「交叉軸前饋(Cross-Axis Feedforward)」與「諧波消除」演算法,系統能主動計算並即時抵銷另一個載台所產生的動態衝擊,確保平行微組裝與高通量取放(Pick-and-place)作業的絕對精度與良率。
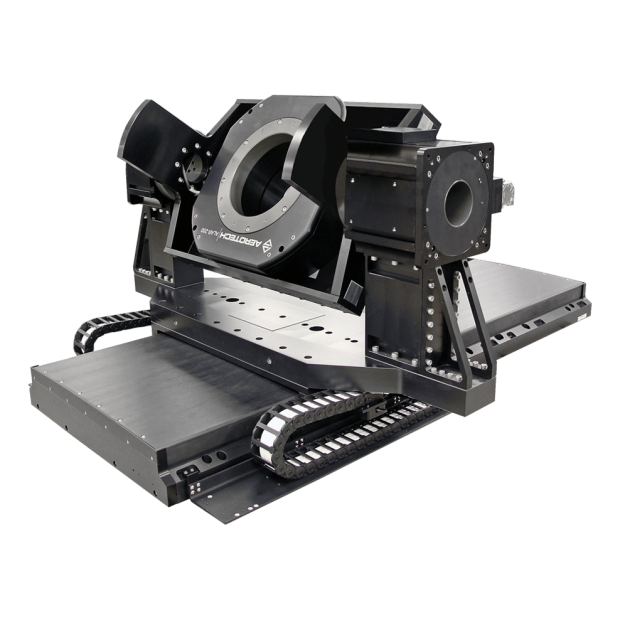
重載 3D 空間的主宰:線性/平衡環複合系統 (Linear/Gimbal System)
針對大型航太部件或車用感測器的 3D 加工與檢測痛點,透過結合長行程與複雜空間翻轉的 雙載台線性定位系統 (Dual Carriage Linear Positioner),捨棄傳統的齒輪傳動,在負責方位角與仰角的旋轉軸上全面導入高扭矩直接驅動馬達,這使得系統能夠在承載大於 50 公斤的巨大負載下,依然提供零遲滯的連續 360 度旋轉與 180 度平滑傾斜控制,針對重心偏移帶來的龐大動態力矩,Aerotech 在底層的長行程線性軸上採用了經過嚴密負載分佈計算(Load Distribution)的高負載承載結構與一體化設計,徹底對抗阿貝誤差的放大效應,確保系統在廣闊的加工區域內進行高速 3D 循跡時,能維持無與倫比的幾何純粹度與空間精準度。
毫秒不差的控制神經網絡:Automation1 與 HyperWire 光纖通訊
要讓這些龐大且極度複雜的客製化機械系統展現出奈米級的細膩,需要無懈可擊的控制大腦,Aerotech Automation1 智能軟體控制器 與專利的 HyperWire® 光纖通訊網路,高達 2 Gbps 的光纖頻寬徹底消除了傳統網路的延遲與封包碰撞,將雙載台或多軸平衡環系統的同步抖動(Jitter)壓制在 1 奈秒以內,配合硬體級的「位置同步輸出(PSO)」技術,系統能即時依據這些複雜機構合成後的「真實 3D 空間座標」來精準觸發外部的雷射或檢測探頭,徹底消滅高速運動與重載變形帶來的取樣失真,提升整體測試與製造效率。
每個尖端實驗室與量產產線的需求皆獨一無二,實際的系統配置將因應您的測試應用、嚴苛規範、場地限制及待測物特性(如雙載台的平行邏輯或重載平衡環的力矩極限)而量身打造,如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創系統」團隊,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援,協助您找到最適合您實驗室的完美解答。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。