
建構數位雙生戰場:次世代無人機模擬系統的高解析度 CDB 3D 地貌資料庫整合挑戰
在 2026 年的高階無人航空載具(UAV)系統工程中,虛擬訓練與感測器演算法驗證已全面邁入「數位雙生(Digital Twin)」時代,現代戰術無人機高度仰賴多光譜光電/紅外線(EO/IR)與合成孔徑雷達(SAR)進行自主導航、地形地貌匹配(TERCOM)及目標辨識,傳統的模擬訓練器僅需滿足人類肉眼的「艙外視覺(Out-The-Window, OTW)」需求,提供幾何外觀與貼圖即可;然而,當受測對象轉變為機器視覺與 AI 演算法時,系統必須提供具備嚴格物理學與熱力學意義的數位環境,為此業界已廣泛採用開放地理空間協會(OGC)制定的通用資料庫(Common Database, CDB)格式,CDB 採用無預先編譯(Pre-compilation)的動態即時存取架構,這雖然帶來了極大的資料標準化優勢,但也對底層的影像產生器(Image Generator, IG)與多邊形渲染管線帶來了極為嚴苛的運算挑戰。
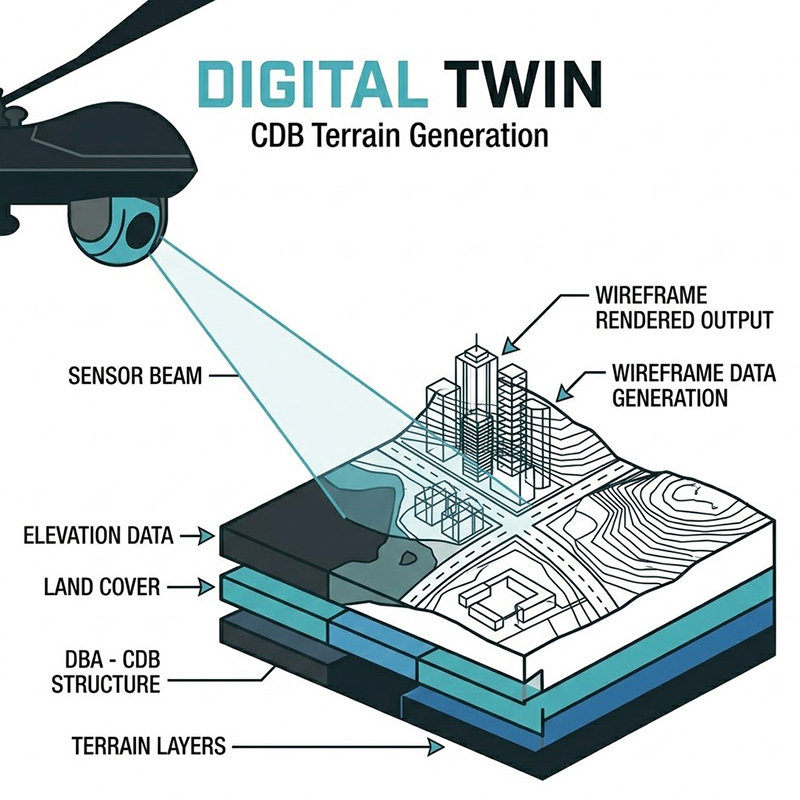
建構一個能完美騙過高階軍規感測器的數位雙生戰場,要求系統工程師在極端龐大的地理空間資料流中,同步處理空間幾何、材質物理特性以及多重感測器之間的絕對資料關聯(Correlation),這在硬體迴路(HWIL)與軟體迴路(SIL)測試實務上,衍生出了三大難以輕易跨越的技術門檻。
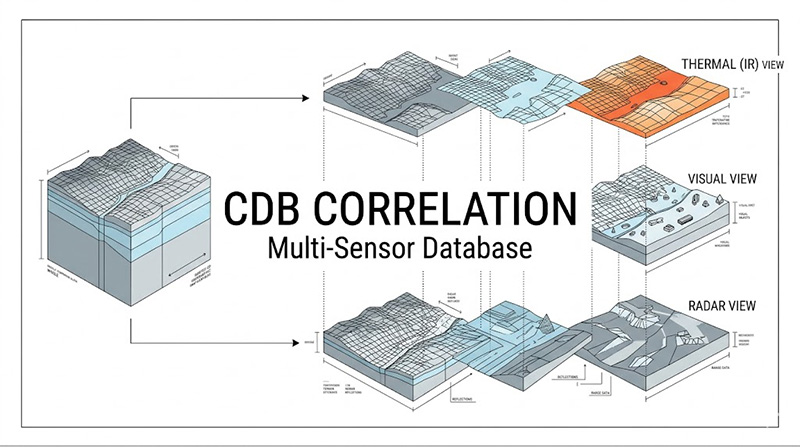
底層 CDB 原生讀取與多重感測器通道的絕對關聯(Absolute Correlation)
在複雜的交戰環境中,無人機可能同時啟動可見光攝影機、長波紅外線(LWIR)以及主動測距雷達,測試規範要求這些感測器在虛擬空間中所讀取到的同一座標點(如一座橋樑的邊緣),其幾何高度與空間特徵必須達到次公分級的零誤差關聯(Zero-error Correlation),傳統的專有資料庫格式在轉換過程中往往會產生多邊形網格(Polygon Mesh)的微小位移,導致 OTW 畫面與感測器畫面產生空間解離,工程師面臨的痛點在於,影像產生器(IG)必須具備「原生直讀(Native Implementation)」CDB 檔案的底層架構,在不經過任何破壞性轉檔器(Converter)的條件下,即時串流龐大的地理節點,確保所有異質感測器通道完全基於同一組底層資料矩陣進行解算。
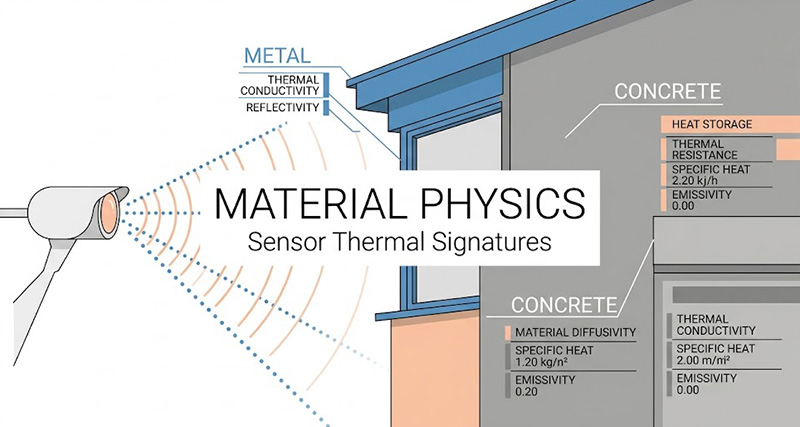
材質物理分類與輻射熱力學渲染的 GPU 瓶頸
要讓紅外線(IR)與雷達感測器模擬發揮作用,3D 地貌不能僅有 RGB 顏色貼圖,必須深度綁定「材質物理特性(RMTexture, Roughness-Metallic Texture)」,例如同樣外觀的屋頂,金屬材質與混凝土材質在太陽照射下的熱容量(Thermal Mass)與輻射率(Emissivity)截然不同,從而在 LWIR 感測器上產生熱交叉(Thermal Crossover)現象;在 CDB 規範中,這些物理特徵被定義至個別的多邊形(Per-polygon Material Assignment)甚至點特徵(Point Features)上,當無人機在低空高速飛行時,影像產生器必須即時計算數百萬個多邊形的大氣衰減、局部熱源(如城市輝光 City Glow)與即時溫度梯度,這種高動態範圍(16-bit HDR)的輻射度渲染會大量佔用 GPU 的材質提取單元,極易導致幀率(Frame Rate)驟降與感測器追蹤脫鎖。
全球連續飛行(Global Scalability)與高解析度嵌入圖(High-res Insets)的無縫接軌
現代 UAV 的超視距任務(BVLOS)航程可達數千公里,數位雙生戰場必須提供無邊界的全球地形涵蓋(例如以 DTED Level 1 為基礎的全球 15 公尺網格,或稱為 DTED Level 2 的加強版),然而針對特定的攻擊目標或起降機場,感測器驗證又需要高達 5 公分(5cm)級別的極致幾何解析度,工程師極難在一個連續的模擬時域中,處理這種解析度跨越數個數量級的空間資料庫,當 UAV 高速切入高解析度局部嵌入圖(High-resolution Insets)區域時,若 IG 的分層細節(Level of Detail, LOD)管理與記憶體分頁機制(Paging)不夠強悍,將引發嚴重的影像撕裂(Tearing)或載入延遲,徹底破壞無人機雷達地貌比對演算法的連續性。
DTED 各級解析度對照表
|
等級 |
網格間距 (弧秒) |
解析度 (約略值) |
主要用途 |
|
Level 0 |
30 弧秒 |
900 公尺 |
戰略規劃、小比例尺地圖 |
|
Level 1 |
3 弧秒 |
90 公尺 |
巡弋飛彈中段導航、中比例尺地圖 |
|
Level 2 |
1 弧秒 |
30 公尺 |
精確打擊、大比例尺地圖 |
面對上述嚴苛的測試,奧創系統推薦導入基於美國 Quantum3D 核心技術的 Independence® IDX 影像產生器與 GeoScapeSE® WWDB 全球地貌資料庫解決方案,我們深知建構次世代無人機的數位雙生戰場,單靠市售的電玩引擎或拼湊的顯示卡是無法滿足軍規感測器驗證的,我們強調的優勢在於而是提供「從真實環境建模到高階感測器模擬驗證的一站式方案 (Turnkey Solution)」。

GeoScapeSE WWDB 是全球首款無縫整合的特定地理資料庫,提供 15M 或 10M 高解析度影像,支援 OTW、NVG、IR、EO 及雷達感測等應用,並針對 Quantum3D 影像產生器進行最佳化。

IDX 9000 提供最強大的即時圖像產生技術,具備4U 高密度計算架構,支援4 張 NVIDIA RTX GPU、Intel Xeon 可擴充處理器,並相容CIGI 4.0、OpenFlight、CDB 等標準;內建 15m 全球範圍地形資料庫,可插入高解析度影像資料,支援夜視、紅外線、電光模擬
針對 CDB 原生讀取與多重感測器絕對關聯的痛點,Quantum3D 最新一代的 MANTIS® 影像產生軟體 具備 OGC CDB 地形格式的完全原生相容性,無需耗時的預編譯過程,它能確保所有 OTW(視覺)通道與 viXsen 感測器通道(如 SWIR、MWIR、LWIR)完全共用相同的底層幾何節點,不僅完美支援 CDB 的地形材質貼圖(RMTexture)與點特徵賦值,更確保了跨頻段感測器資料的百分之百物理關聯性。
Quantum3D 的 Mantis 影像產生器視覺模擬軟體的直升機模擬器功能
針對材質物理分類與輻射熱力學渲染,IDX 系列影像產生器 結合了先進的 NVIDIA Quadro Sync 架構與 JRM SigSim 高階感測器運算外掛,系統能精確讀取並解析第三方材質分類器(如 MCM 工具)產出的物理參數,以 16-bit 高動態範圍即時運算複雜環境下的熱特徵、光學畸變與局部區域對比度增強(LACE),協助客戶符合最高等級的紅外線與光電酬載測試規範。
最後,針對全球尺度與極致解析度的無縫接軌需求,GeoScapeSE WWDB 全球地貌資料庫 提供全球無縫的 15M/10M 連續飛行背景影像,並支援客製化的「高解析度局部嵌入(Drop-in High-Resolution Insets)」,系統能在 UAV 高速切入機場或特定城鎮區域時,平滑加載高達 5 公分等級的精密 3D 建築與材質特徵,大幅提升測試效率與場景逼真度。
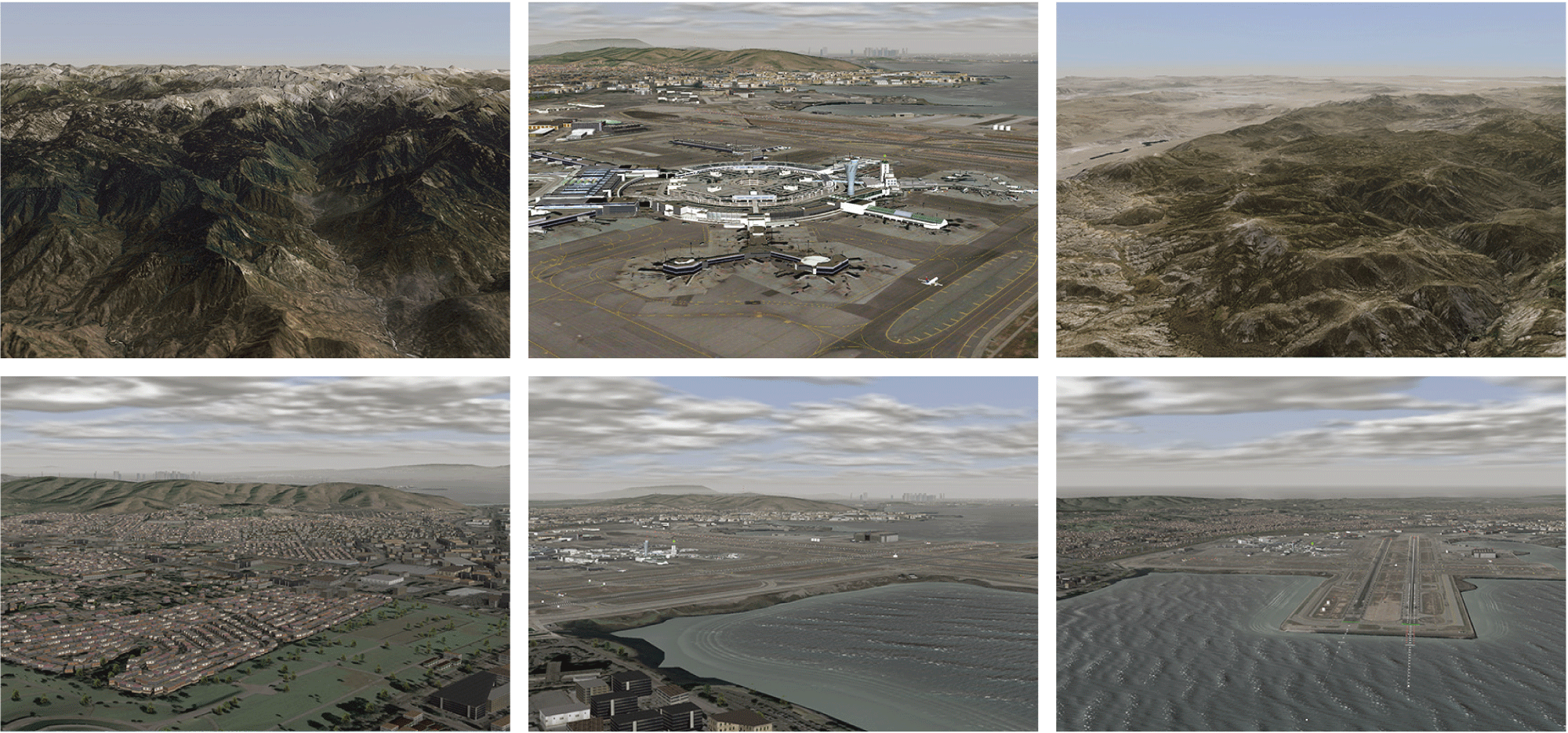
GeoScapeSE WWDB 影像範例

GeoScapeSE 全球資料庫區域
實際的系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。