
發射模式下的波束成形天線量測
在進行波束成形權重的驗證時,需具備快速且精確的測試能力,例如:在進行碼本(codebook)生成或波束成形演算法的開發與驗證時,本文說明了 R&S 向量網路分析儀(VNA, Vector Network Analyzer)用於波束成形的多單元天線被動部分進行完整分析時的獨特應用。
部分 R&S 向量網路分析儀型號可選配多個獨立訊號源的功能,這些訊號源之間的相對幅度與相位可被任意控制(稱為定義相干模式(Defined Coherence Mode)),並可同時控制頻率與真實時間延遲(true time delay),這些訊號源可分別連接至多單元天線的各個天線單元,以實現並驗證發射(Tx)模式下的波束指向(beamsteering)與波束成形(beamforming)操作。
R&S®ZVA 在「定義相干模式」下,可透過電子方式於傳統 S 參數量測模式與波束成形量測模式之間切換,因此可在天線的單次連接周期內,高效地完成 S 參數與波束成形量測,多台 VNA 亦可採用串接(daisy-chain)方式連接,以擴展此概念,從而支援任意數量的連接埠。
引言
S 參數量測(S-parameter measurement)定義為僅激發一個量測埠(stimulated port),並測量從該埠反射回來的波,以及傳輸至其他埠的波,因此許多網路分析儀(Network Analyzer)通常只使用單一訊號源。
在高階市場中,ZVA 系列網路分析儀可選配多組內部訊號源,並可在「定義相干模式(Defined Coherence Mode)」下啟用,在此模式中,多個內部訊號源可同時運作,且可被設定為任意的頻率、相位、與振幅偏移,這些經過高精度控制的多組訊號源可分別連接至多單元天線的各個埠、或單元。
此特性使之能以極高解析度進行波束指向(beam steering),並在天線的發射模式(Tx mode)下進行波束成形(beamforming)量測,同時仍可在相同連接循環內執行 S 參數量測。
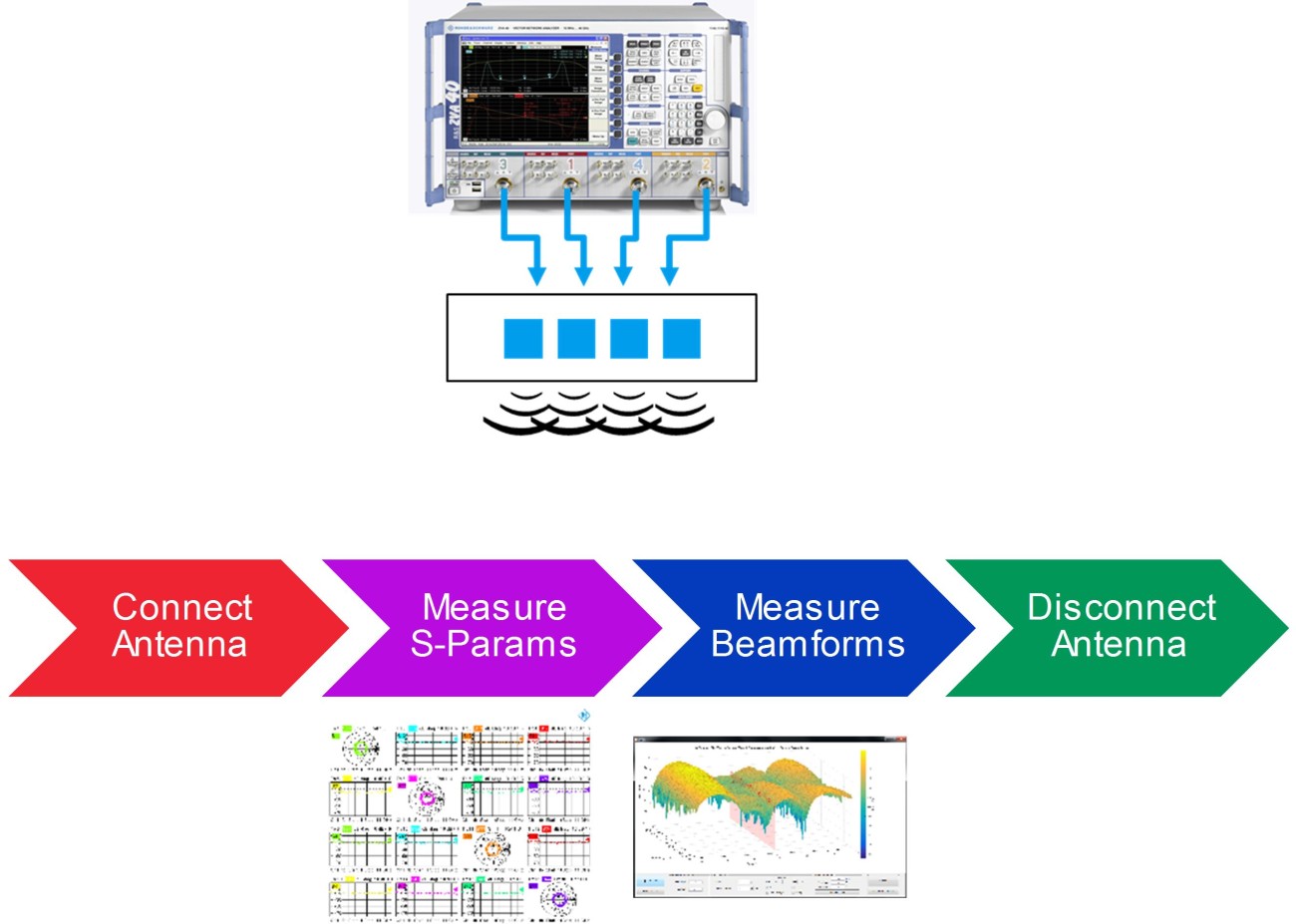
圖 1-1: 多輻射元件(例如波束成形天線)的測試流程
此外,多台網路分析儀亦可採用串接(daisy-chain)方式連接,以擴充可用的埠數,從而支援更多通道的波束成形特性量測。
讀者指南
第 2 章說明了一個多單元天線於發射模式(Transmit Mode)下的範例測試架構,本文使用了配套軟體,可使用 R&S® QuickStep 軟體實現天線的快速量測。
第 3 章展示了在一組創新的 X 波段(X-band)混合主動-寄生式(hybrid intentional-parasitic)天線陣列(共四個元素)上所進行的量測,透過僅一次連接循環(single connection cycle),即可同時完成天線的 S 參數量測與發射模式下的波束指向(Tx-mode beamsteering)驗證。
第 4 章介紹了針對簡單的 Ka 波段(Ka-band)4×10 天線陣列所進行的量測,在此案例中,於四個主動元素下進行一次連接循環的 S 參數與 Tx 模式波束成形(beamforming)量測;此外亦透過多台 ZVA 串接(daisy-chaining)的方式,示範將 Tx 模式波束指向的概念擴展至更多(共 7 個)埠的應用。
第 5 章則說明如何利用所提供的 MATLAB 可執行檔對量測結果進行後處理(post-processing)。
2. 入門指南
2.1 說明
本應用通用測試架構如圖 2-1 所示,使用單一固定式接收器,而發射天線則安裝在轉台(turntable)上,此配置常用於天線設計與開發階段,因其能提供靈活的方向掃描能力。
根據不同的測試目的,也可採用多種替代配置,例如:
- 使用多個接收器組成的機械靜態(mechanically static)測試環境,或
- 採用功率計(power meters)進行量測等。
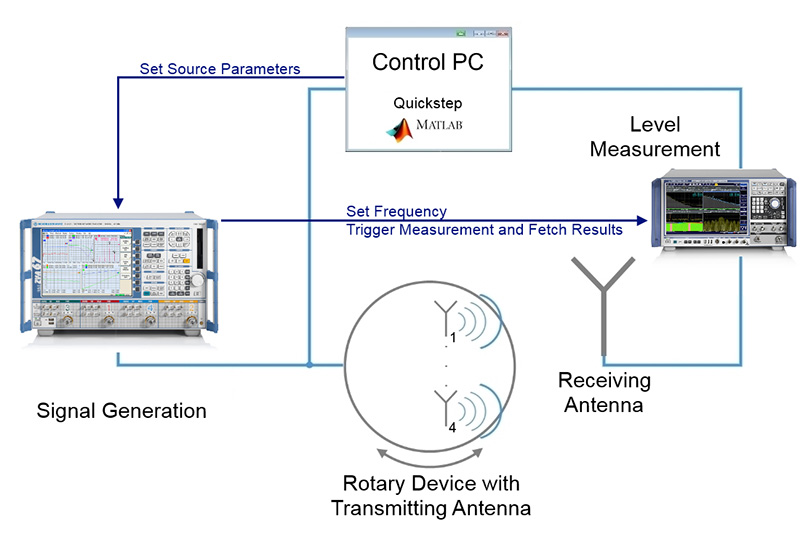
圖 2-1: 基於單一接收器與轉台的波束成形天線範例測試架構
傳統多埠 VNA 的天線 S 參數量測在此不再詳述,只說明關鍵的「定義相干模式(Defined Coherence Mode)」與「單一訊號源 S 參數模式(Single Source S-parameter Mode)」之間可快速且以電子方式切換。
要分析天線的波束成形(beamforming)操作,需要獨立掃描多個變數,包括:
- 訊號源間的振幅差(Differential Amplitude)(至少兩個訊號源之間)
- 訊號源間的相位差(Differential Phase)(至少兩個訊號源之間)
- 頻率(Frequency)
- 方位角(Azimuth)
為達成此目的,本應用的測試配置包含以下元件:
- ZVA 向量網路分析儀:
- 提供多組「定義相干」訊號源
- 單台 ZVA 可支援 4 埠操作,頻率最高可達 24 GHz、40 GHz 或 67 GHz
- 可採串接(daisy-chain)方式擴充埠數
- AUT 轉台(Turntable,選配)
- 當需要對受測天線(AUT)進行機械式方位角掃描時使用
- 接收天線(Receiving Antenna)
- 在此範例中,使用一個 10 dB 矩形標準增益喇叭天線(standard gain horn)
- 若採用功率計,則可考慮使用更高指向性(higher directive gain)的天線
- 亦可搭配或取代為多組接收器,配合轉台以進一步縮短測試時間
- FSV 或 NRP
- 視需求可選用頻譜分析儀(spectrum analyzer)或功率計(power meter),以滿足頻率分辨率、動態範圍等不同要求
- QuickStep 軟體
- MATLAB 軟體
空中介面(air interface)的最佳化配置應根據實際應用個別調整,例如:
- 在實驗室開發天線時,可能傾向利用頻譜分析儀的頻率濾波功能;
- 若需進行高速測試,則可能不適合進行詳細的方位角掃描,此時可以多個固定接收天線搭配功率計取代轉台。
而 QuickStep 軟體專案可控制轉台內部由 Arduino 驅動的步進馬達(stepper motor)。
2.2 ZVA 的校準
在「定義相干模式(Defined Coherence Mode)」下,ZVA 的四個訊號源(或根據儀器配置為兩個)會產生具有使用者自訂相對振幅與相位關係的訊號。
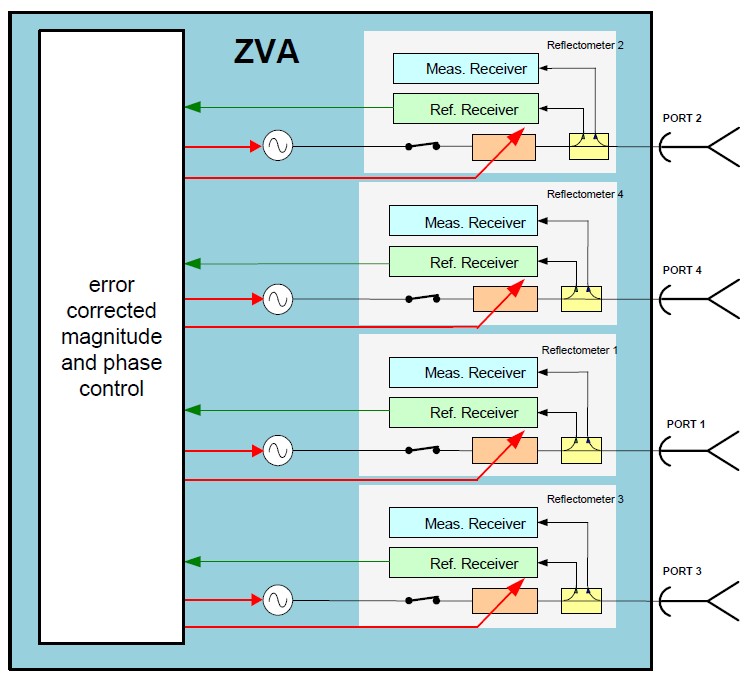
圖 2-2: 多訊號源 ZVA 的功能示意圖
來源埠與相干訊號特性的設定
所有來源埠(source ports)及其相干訊號(coherent signals)的特性,皆可在 「Defined Coherence Mode(定義相干模式)」對話框中設定,其中需選擇一個參考埠(reference port),所有相干訊號的振幅與相位皆以該參考埠為基準。
為了在連接至受測天線(AUT)的測試埠纜線末端,取得正確的相位與幅度關係(phase and magnitude relationship),必須執行完整的四埠校準(full 4-port calibration);因此,不需要使用相位匹配(phase-matched)且衰減一致的纜線;只要纜線在校準與量測之間移動時能保持振幅與相位穩定即可,同一組校準結果亦可用於第 4.2 章所述的 S 參數量測。
多台 ZVA 串接(Daisy-Chaining)校準程序
當多台 ZVA 採用串接(daisy-chained)方式運作時(見圖 2-3),校準需分兩個步驟進行,在圖 2-3 中,ZVA1 與 ZVA2 的 Port 1 均被選定為參考埠。
ZVA1 的 Port 1 連接至 ZVA2 的 Direct Generator Receiver Access(直接產生器接收器存取)中的 Source In 埠。
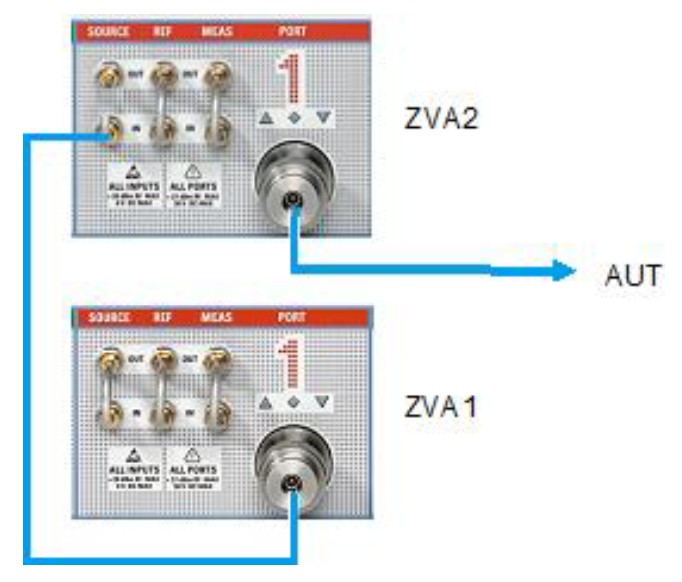
圖 2-3:多台 ZVA 串接示意圖
ZVA1 的訊號會經過方向性耦合器(directional coupler),再進入 ZVA2 的 Test Port 1,最後透過纜線連至 AUT,此路徑仍對應於 ZVA1 的 Port 1;接著對 ZVA1 的四個埠執行四埠校準(可使用校準模組或機械校準套件),以建立在 ZVA1 的「定義相干模式」對話框中所設定的振幅與相位關係。
要校準 ZVA2 時,先斷開 ZVA1 的 Port 1 與 ZVA2 的 Source In 連接,並將 ZVA2 的 Source In 與 Source Out 以短路(loop)方式相連,然後對 ZVA2 的所有四個埠進行校準,此時,ZVA2 的各埠會依據 ZVA2 的相干模式設定,建立相對於 Port 1(ZVA2) 的振幅與相位關係;完成兩台儀器的校準後,將兩者切換至相干模式(coherence mode),並再次將 ZVA1 的 Port 1 連回 ZVA2 的 Source In。
此時:
- ZVA1 根據其 Port 1 耦合器測得的參考訊號,調整其訊號源的振幅與相位;
- ZVA2 則根據其 Port 1 測得的參考訊號,進行同樣的調整。
應於實際量測配置而仍然有效;此程序可擴展至三台或更多儀器,建議所有儀器共用相同的參考頻率(common reference frequency)以確保同步性。
2.3 QuickStep 測試執行環境
在進入下一步之前,需要先安裝 QuickStep 軟體。
2.3.1 專案安裝
本文會使用兩個 QuickStep 專案:
- Antenna_Scan_Analyzer:使用訊號分析儀(Signal Analyzer)進行接收功率量測。
- Antenna_Scan_PowerMeter:使用功率計(Power Meter)進行接收功率量測。
UserBlocks 與 Projects 資料夾,需要複製至 QuickStep 的預設目錄:
C:\Users\Public\Documents\Rohde-Schwarz\QuickStep
啟動 QuickStep 後,系統會顯示一個對話框,要求使用者選擇欲開啟的測試專案,如圖 2-4 所示,點擊對應的按鈕即可開啟任一專案。
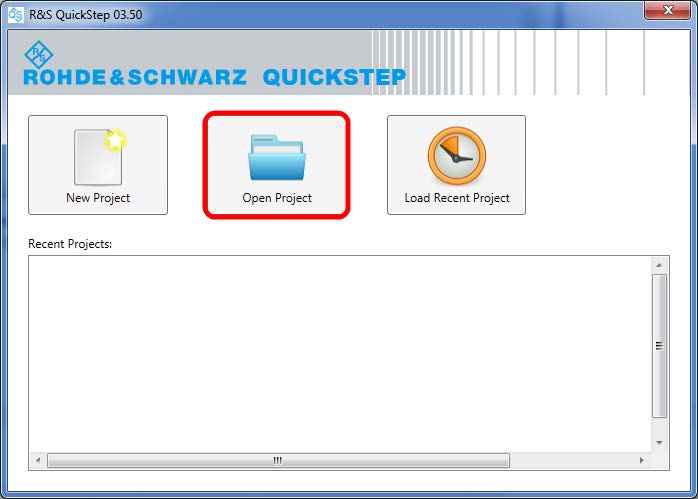
圖 2-4:開啟所提供的 QuickStep 專案範例
2.3.2 測試流程
進行一次完整的量測,需依照以下步驟:
- 設定所有設備與連接(依照說明書所示的接線方式進行)
- 使用系統設定工具(System Configurator)設定所有儀器
- 設定測試步驟(Test Steps)
- 啟動量測(Start Measurement)
- 使用 MATLAB® 分析量測結果
2.3.3 系統設定
使用 System Configurator(系統設定工具) 可設定所有儀器並定義基本量測參數,可在 QuickStep 介面中點擊 「System Configurator」 分頁進入,如圖 2-5 所示。
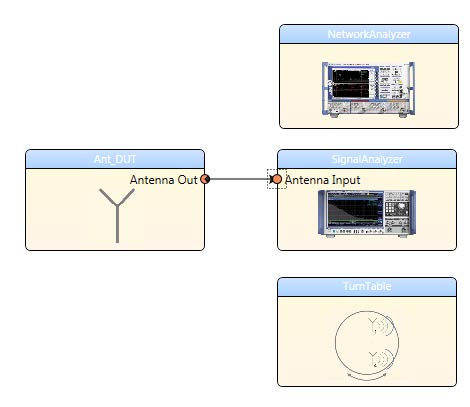
圖 2-5:System Configurator 視圖
點擊各儀器區塊後,會顯示可設定的參數如下:
向量網路分析儀(Network Analyzer)
- IP Address ZVA:VNA 的 Visa 資源位址,例如:TCP IP::192.168.0.2
- Start Freq.:頻率掃描起始值(單位:MHz)
- Stop Freq.:頻率掃描終止值(單位:MHz)
- Freq. Step:起止頻率間的步進頻率(單位:MHz)
較小的步進值會產生更多量測點,但量測時間也會相對增加。
- Level:發射功率等級(單位:dBm)
- Load Cal. File:從「Calibration Manager」中載入的校準檔名稱。
訊號分析儀(Signal Analyzer)
- IP Address Signal Analyzer:訊號分析儀的 Visa 資源位址,例如:TCPIP::192.168.0.2
- Reference Lvl:量測使用的參考功率等級(單位:dBm)
- Level Range:量測使用的振幅範圍(單位:dBm)
- No. of Averages:平均次數,即分析儀對多次量測取平均的次數
- Channel Bandwidth:量測通道功率時所使用的頻寬(單位:kHz)
- Freq. Span:量測所使用的頻率範圍(單位:kHz)
轉台(Turn Table)
- Com Port Turn Table:與轉台連接的虛擬 COM 埠。
為此需先安裝最新版的 Arduino 驅動程式。
- Steps per Test Step:定義每次測試角度變化後,轉台移動的步數。
例如:若每步為 0.6°,且設定為每次測試移動 2 步,則角度解析度為 1.2°。
- Initial Rotation Steps:定義第一次量測時的起始角度。
例如:若設定值為 150,且每步為 0.6°,則量測將從 -90° 開始。
注意:若修改了步進數,請務必於 Testplan Editor(測試計畫編輯器) 分頁中的 TPR Options 內,更新總重複次數(Total Number of Repetitions),以確保測試計畫設定正確。
2.3.4 測試計畫編輯
此視圖用於設定在一次量測過程中需執行的所有測試步驟(Test Steps),在此編輯器中所定義的每一個測試步驟,皆會在每個角度(angle)執行一次。
設定說明
圖 2-6 顯示了可設定的部分測試步驟參數範例,若使用試用版授權(trial license),部分設定將受到限制;但若使用正式授權版本(full license),則所有參數皆可自由編輯與程式化設定,在此範例中,第二個測試步驟對 Port 2 的相位進行單線性掃描(single line sweep),因此每個角度實際上共有 11 個測試步驟,對每個測試步驟,都會在設定的頻率範圍內進行一次掃描(frequency sweep),也就是說,在每個角度下,Port 2 會以不同設定進行 11 次頻率掃描。

圖 2-6:測試步驟設定範例(Example Test Step Settings)
可用參數說明
- Rel. Ampl. P.1–4:設定各埠(Port 1 至 Port 4)相對於參考埠(Reference Port)的相對振幅偏移量(dB)。
參考埠的設定值將被忽略。
- Rel. Phase P.1–4:設定各埠相對於參考埠的相對相位偏移量(°)。
參考埠的設定值將被忽略。
- Rel. Freq P.1–4:設定各埠相對於參考埠的相對頻率偏移量(Hz)。
參考埠的設定值將被忽略。
- P.1–4:若勾選此方框,則啟用該埠的輸出功能。
- Reference P:定義本次測試步驟所使用的參考埠(Reference Port)。
- Delay P.1–4:為各獨立訊號源埠設定使用者自訂的延遲時間(picoseconds)。
TPR 選項
在 QuickStep 介面右側的視圖中,預設會顯示所有測試步驟的設定,若要設定重複次數(Repetitions),可點擊如圖 2-7 所示的 「TPR Options」 分頁,此設定對應於轉台的總步數(total turntable steps),亦即量測所覆蓋的方位角範圍(azimuth range);在此範例中,所有測試步驟將執行 301 次,若角度解析度設定為每步 0.6°,則對應的方位角範圍為 -90° 至 +90°。
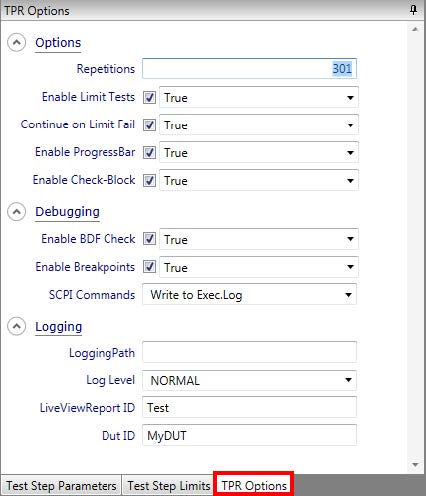
圖 2-7:轉台步數設定範例(Turntable Step Count Configuration)
建立測試流程
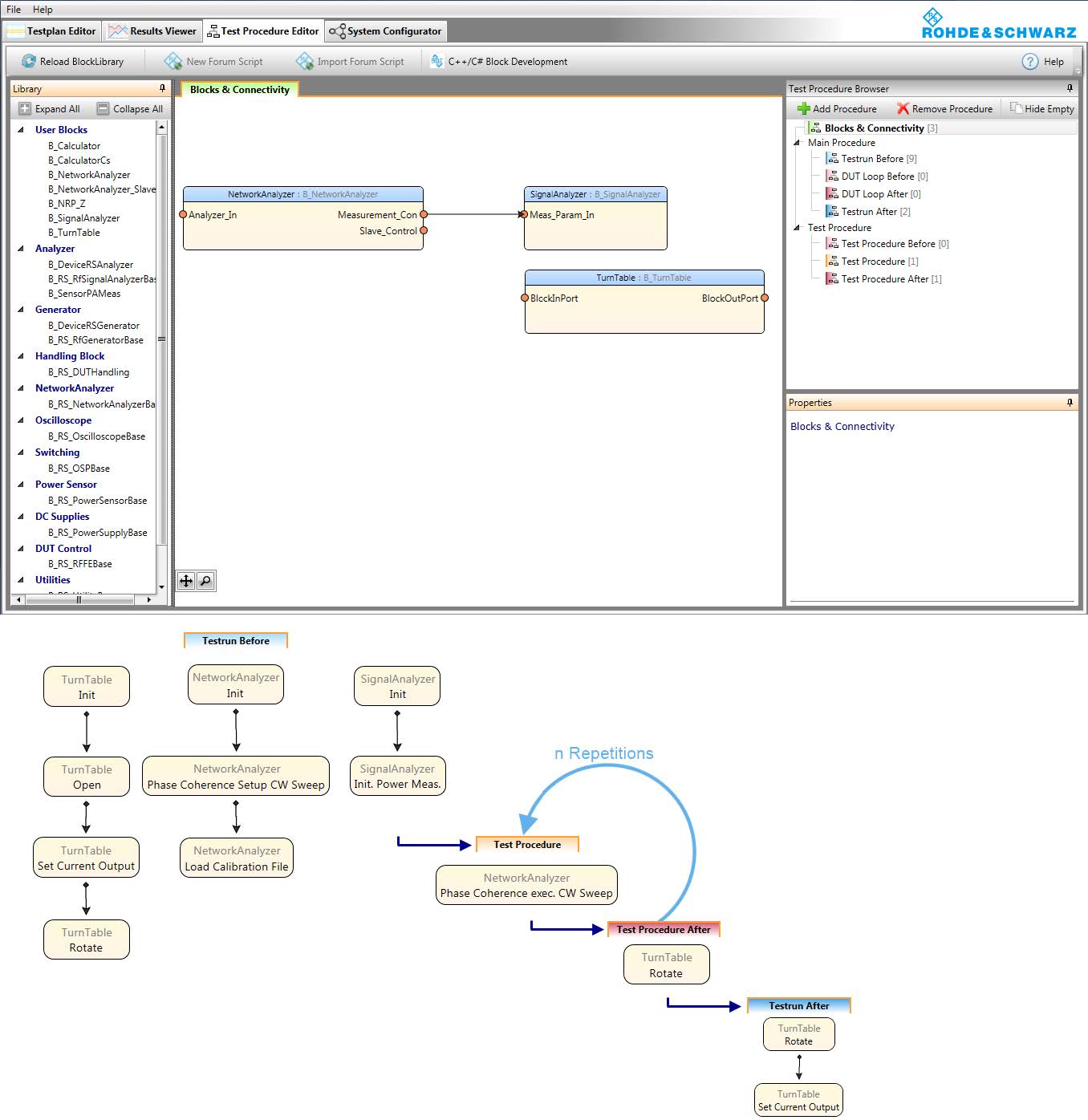
圖 2-8:在 QuickStep 中建立測試程序的流程示意
如圖 2-9 所示,可設定兩個以上的測試步驟,並對不同的 RF 通道(RF Chain) 設定不同參數,這些測試步驟可重複執行多次,而在每次重複中:
- 「Test Procedure Before」
- 「Test Procedure」
- 「Test Procedure After」
這三個階段中的所有功能模組(block functions)都會被重新呼叫與執行。

圖 2-9:測試計畫範例(Example Test Plan)
3. X波段寄生式陣列量測
3.1 天線介紹
本研究中的第一個測試對象為一組 X 波段原型天線陣列(prototype array),此天線包含 4 個主動輻射單元(driven / intentional radiators),每個主動單元皆配有 4 個可切換的寄生輻射單元(switched parasitic radiators),圖 3-1 顯示了該天線及其測試架構。
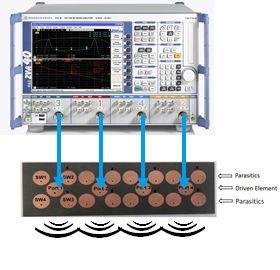
圖 3-1: X 波段 4 元件天線照片,連接至 4 埠 ZVA(接收器未顯示)
3.2 S 參數量測(S-parameters)
S 參數的量測可使用 ZVA 於其傳統模式(conventional mode)下進行,這可用來分析各埠間的反射與傳輸特性,並為後續波束成形測試提供參考基準。
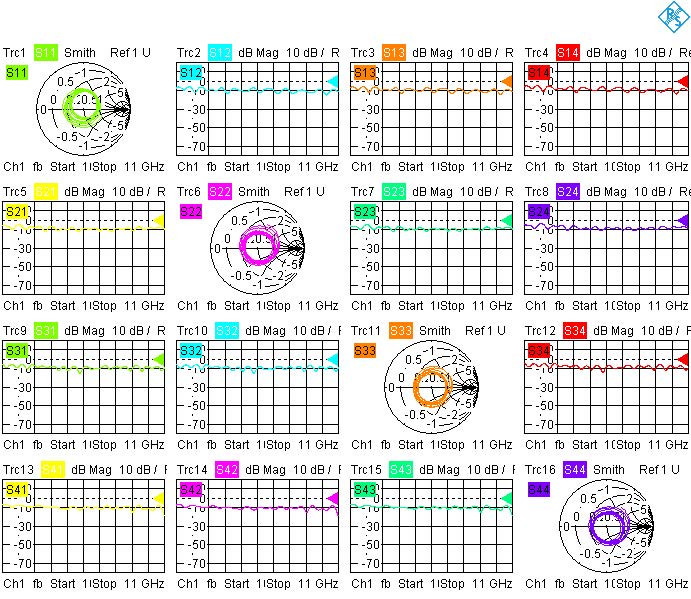
圖 3-2: X 波段天線的 4 埠 S 參數量測結果
3.3 四埠波束指向量測(Beamsteering)
在此測試中,天線的寄生輻射單元經由硬體切換(hard-wired switches)設定為一個固定的波束方向,最佳化至約 41° 的指向角,為實現此波束指向設定,4 個埠需同時輸入具有228° 相位差(相鄰元素間)的訊號,且這些訊號之振幅需對齊(amplitude aligned)。
透過在 ZVA 中電子切換至「定義相干模式(Defined Coherence Mode)」,可讓多組訊號源同時激發(simultaneously stimulated)天線各埠,從而在發射模式(Tx mode)下模擬波束成形操作,圖 3-3 顯示了波束指向驗證量測結果的後處理(post-processing)圖。
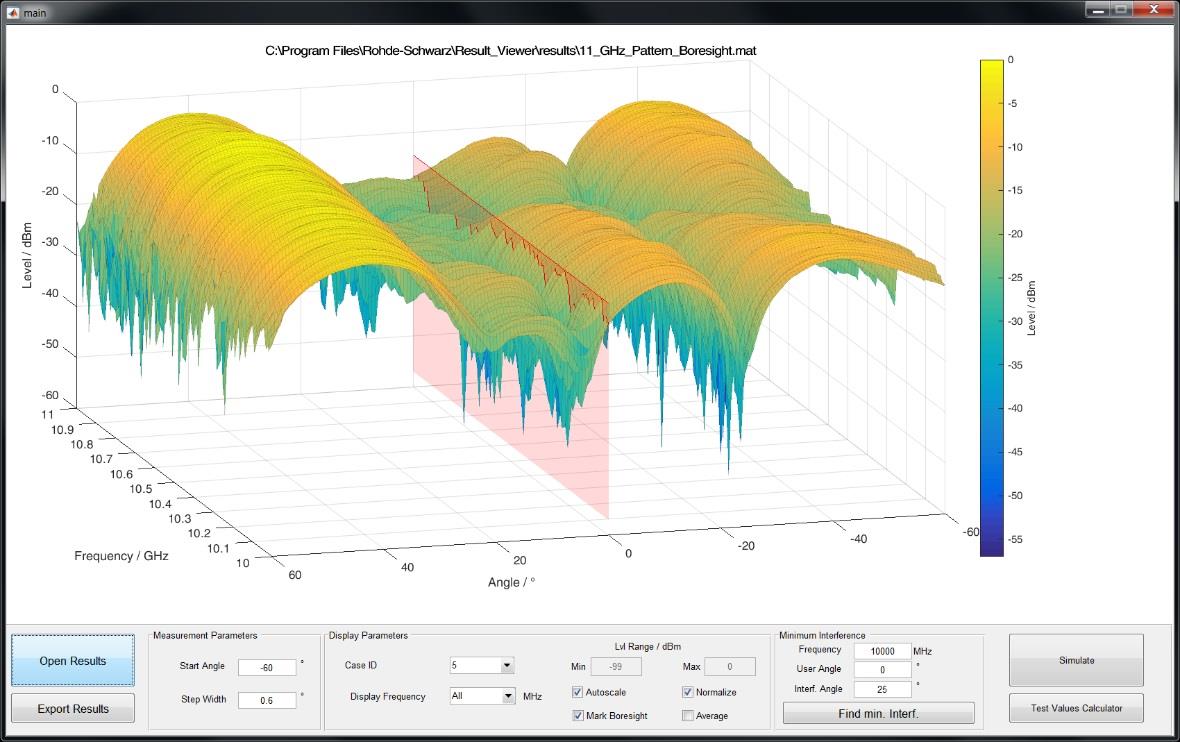
圖 3-3: 四埠發射模式(Tx-mode)波束指向驗證結果
量測結果顯示,在 方位角 40° 處,指向性增益(directive gain)出現明顯峰值,而在正前方(boresight)方向的增益則明顯受到抑制,ZVA 的「定義相干模式」具有極高的相位解析度(phase resolution),因此可透過細微調整參數,驗證天線設計的相位是否達到預期精度。
4. Ka 波段簡易陣列量測
4.1 天線介紹
本章節所使用的 Ka 波段陣列天線具有以下基本參數:
- 頻率範圍(Frequency Range):26 ~ 30 GHz
- 輻射單元(Radiators):4 × 10 陣列結構
- 單元間距(Inter-radiator Spacing):5 mm
圖 4-1 顯示此天線的外觀,其中有 4 個輻射單元與 ZVA 連接以進行測試。

圖 4-1: 4 × 10 Ka 波段陣列,4 個單元連接至 ZVA
4.2 S 參數與發射模式波束指向量測
在此部分,將於一次連接循環中進行波束指向(beamsteering)與 S 參數(S-parameter) 的量測;首先,針對陣列中部分獨立的輻射單元,在專業電波暗室中於 28 GHz 頻率下進行了傳統的輻射方向圖(radiation pattern)量測,如 圖 4-2 所示。
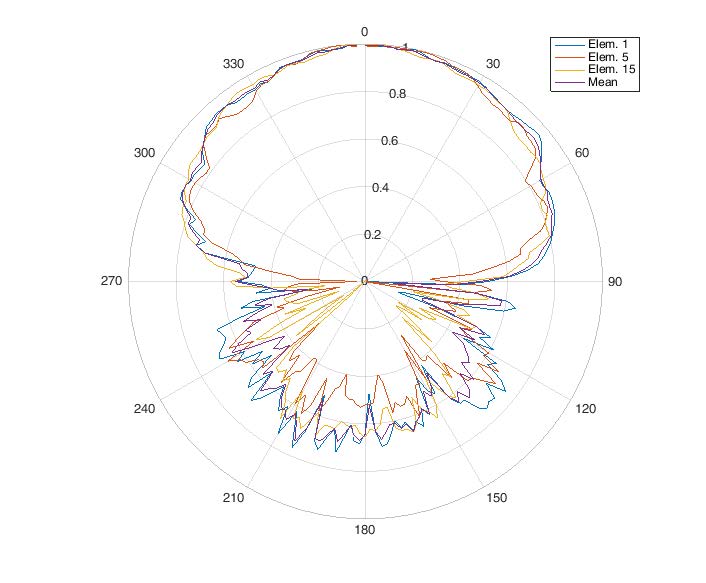
圖 4-2: 陣列中部分輻射單元的方向圖
根據此方向圖,可以計算出當四個輻射單元同時作用時的合成方向圖(composite pattern),如 圖 4-3 所示。
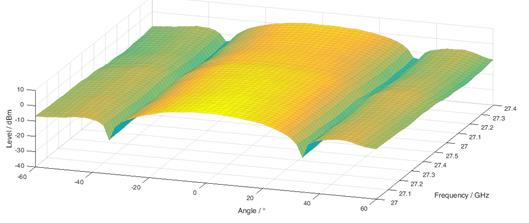
圖 4-3: 由單一單元量測結果計算之四單元方向圖
接著,透過實際測試系統進行驗證,所得結果如 圖 4-4,顯示了量測驗證(verified by measurement)與計算結果的一致性。
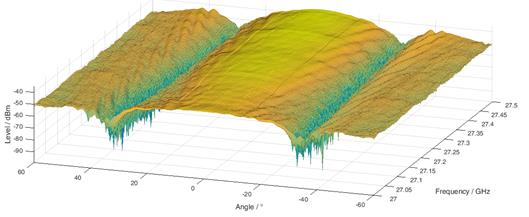
圖 4-4: 以實測方式驗證的四單元方向圖
此外,亦量測了完整的 4 埠 S 參數(full 4-port S-parameters),包括交互耦合(cross-coupling)、反射損耗(return loss)、與傳輸功率(delivered power)等,並以電子切換方式從「Defined Coherence Mode」切換回常規量測模式。
![]()
圖 4-5: 四個連接陣列單元的完整 S 參數量測結果
4.3 七埠發射模式波束指向量測
在此部分,使用 兩台 ZVA 以串接(daisy-chaining)的方式擴充可用的埠數,使得波束成形與波束指向可在多埠系統下進行量測,此概念可擴展至任意埠數,本範例中使用兩台 ZVA 建立了一個 7 埠系統,如 圖 4-6 所示。
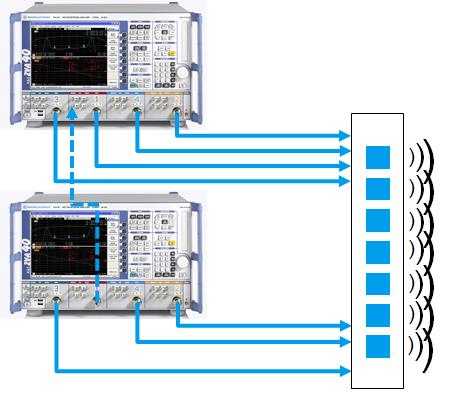
圖 4-6: 串接 ZVA 以擴展至 n 埠的單連接波束成形與 S 參數量測架構
透過此連接方式,可進行如下量測:
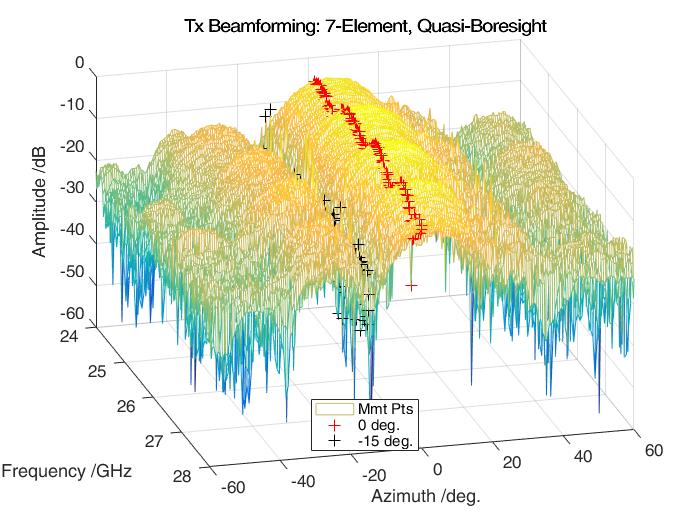
圖 4-7: 七埠同相激發(in-phase excitation)下的波束在方位角與頻率掃描下的量測(boresight case)。
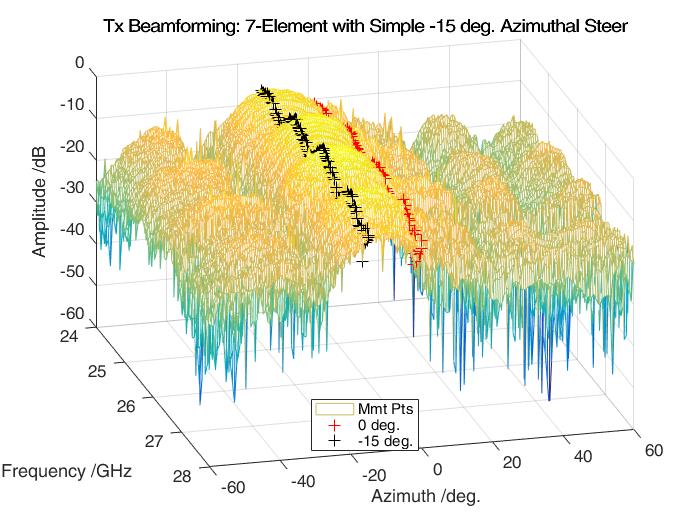
圖 4-8: 施加固定相位差以實現 -15° 波束指向時的量測結果(beamsteered case)。
ZVA 系統允許以任意的振幅與相位組合進行波束成形量測。
4.4 四單元發射模式波束成形
波束指向(Beamsteering)與波束成形(Beamforming)雖相關,但目標略有不同:
|
項目 |
目標 |
控制方式 |
範例 |
|
Beamsteering |
將主波束最大化地指向預定方向 |
固定相位偏移 |
指向 -30° 使用者 |
|
Beamforming |
同時最大化使用者與干擾源間的功率差 |
振幅 + 相位加權 |
抑制位於 +20° 的干擾者 |
在波束成形中,會根據使用者與干擾者方向,設定一組振幅與相位加權值(amplitude and phase weighting),這些權重可記錄在查找表(LUT, Look-Up Table)中,或以曲線擬合的方式儲存在碼本(codebook)中,這個測試應用以四單元天線進行振幅、相位、頻率與方位角的多維掃描,並使用 MATLAB 進行後處理分析(post-processing)。
在範例中:
- 使用者位於 18° 方位角,頻率為 26 GHz
- 干擾者位於 -18° 方位角
在最基本情況下(所有單元振幅與相位相同),得到的主波束方向(boresight pattern)如 圖 4-9 所示,該方向圖的功率值(dB)以最大值為基準進行歸一化;結果顯示,干擾源相對於使用者的抑制度(rejection level)為 8.9 dB。
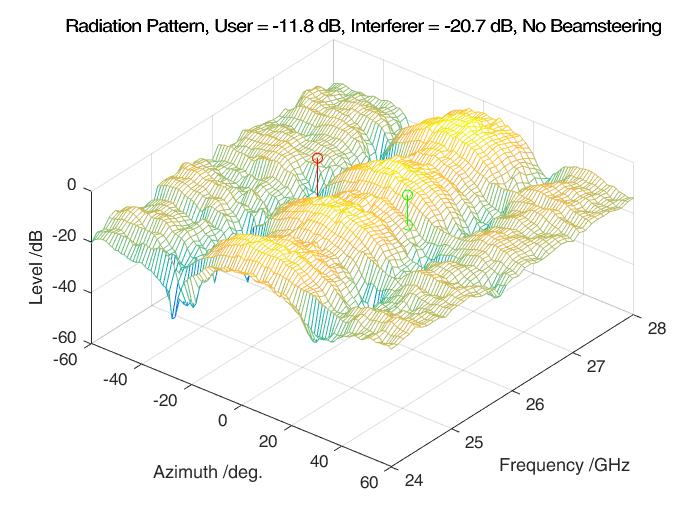
圖 4-9: 四單元陣列在 26 GHz、使用者於 18°、干擾者於 -18° 的基準波束方向圖(歸一化功率)
4.5 相位與振幅加權對波束的影響
當對陣列中每個天線單元施加 40° 的相位差時,主波束會產生明顯的偏轉(beam steer),如 圖 4-10 所示;此時,位於 18° 方位角 的使用者可觀察到鏈路增強(link enhancement)的效果。
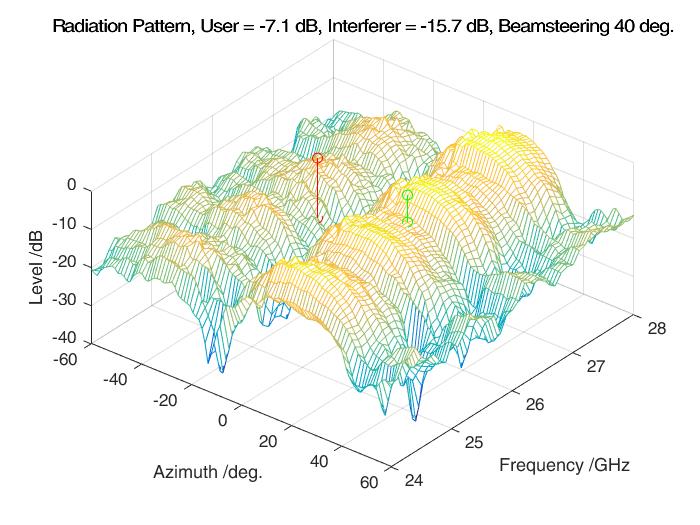
圖 4-10: 在四個天線單元間施加 40° 相位差所產生的波束偏轉與鏈路增強效果
然而這種單純的波束指向操作導致干擾抑制度(rejection)下降至 8.6 dB,也就是說,在僅進行相位偏移(beamsteering)時,雖然主波束對準使用者,但干擾者的接收訊號也被增強,甚至超過了預期的使用者增益。
改進方案:同時調整振幅與相位
為了進一步提升對干擾源的抑制,接下來對四單元陣列施加複數加權(complex weighting),即同時控制振幅與相位,設定如下:
- 各單元的相對振幅為:[-2 dB, 0 dB, 0 dB, -2 dB]
- 相鄰單元間維持 40° 相位差
此組加權能有效改變波束形狀(shape the beam),使其在保持合理主波束增益的同時,對干擾源方向的訊號產生更強抑制。
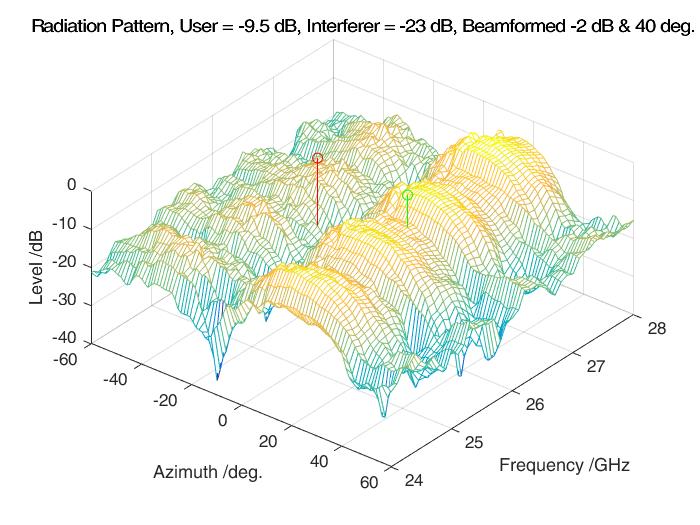
圖 4-11: 透過調整四單元的振幅與相位,改變波束形狀並提升對干擾源的抑制度
在這種情況下,干擾抑制度提升至 13.5 dB,雖然整體天線輸出功率略有降低,但訊號品質與方向性分辨能力(discrimination capability)明顯改善。
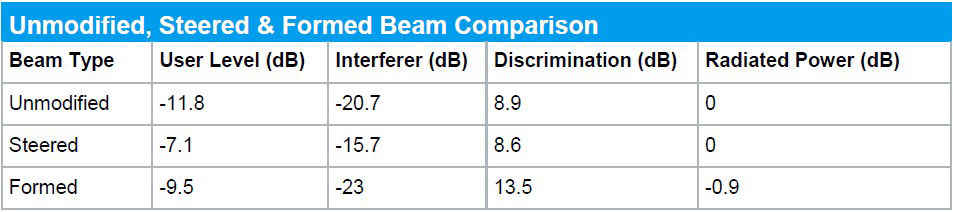
表 4-1:三種操作模式下使用者與干擾者的性能比較
綜上所述,透過同時控制相位與振幅加權(amplitude & phase weighting),可在不顯著犧牲總輸出功率的情況下,顯著提高干擾抑制度與通訊鏈路品質,達成更具選擇性與穩定性的波束成形效果。
5. 後處理
5.1 準備工作
接下來將透過「Result Viewer Post-processor」(結果檢視器後處理器,一個 MATLAB 可執行檔),可用於後處理由 Quickstep 測試執行程式產生的結果檔案,執行此可執行檔需要安裝免費的 MATLAB Runtime (本文中部分結果已使用此工具產生。)
如果安裝程式未偵測到 MATLAB Runtime,將下載並安裝它作為整體安裝過程的一部分,由 Quickstep 測試執行程式產生的結果檔案以 ASCII 格式儲存,使用者可以視情況自由執行額外或其他處理。
5.2 後處理量測結果
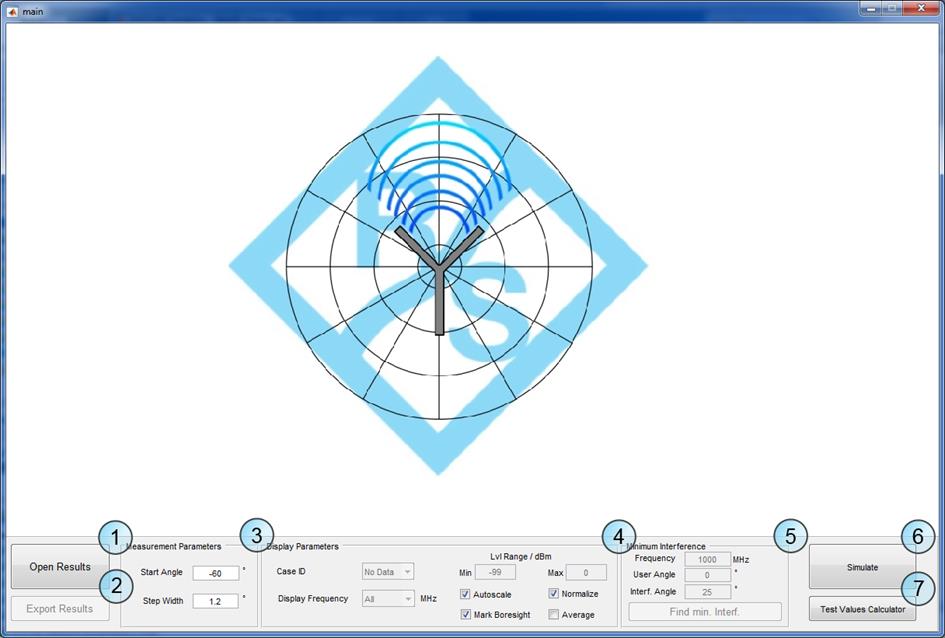
圖 5-1: 結果檢視器的主視窗
請參閱圖 5-1,底部工具列提供了所有必要的控制項,用於載入和設定量測資料的檢視,以及模擬線性天線陣列,以下內容詳細說明所有控制項的功能:
開啟結果
結果可以 QuickStep 軌跡 (traces) 或由「結果檢視器」匯出的 .mat 檔案形式匯入。
- 匯入 Quickstep 軌跡:
開啟一個對話框,以便選擇量測軌跡資料的路徑,範例路徑如下: C:\Users\Public\Documents\Rohde-Schwarz\QuickStep\Projects\Antenna_Scan\Results\yyyy_mm_dd_Result\1_MyDUT\Traces
選擇正確的資料夾後,將會顯示量測資料,重要的是必須深入到階層結構中的 "Traces" 子目錄。 - 匯入 .mat 檔案:
開啟一個對話框,以便選擇先前匯出的資料檔案,該檔案包含以下向量:- amp_values: 所有 ID 在不同頻率和角度下的振幅值
- idCell: 包含所有測試 ID 的儲存格 (Cell)
-
- freq_Vector: 包含測試頻率的向量
- angle_Vector: 包含測試角度的向量
匯出結果
將結果匯出為 .mat 檔案,其結構如第 1 步驟所述,匯出的資料可用於您自己的腳本 (scripts) 中,或匯入到結果檢視器。
量測參數
設定無法從資料集中推斷的參數:
- 起始角度 (Start Angle): 執行第一次量測掃描 (sweep) 時的天線角度,例如 -90°
- 步進寬度 (Step Width): 增量方位角 (azimuth) 步進角度,例如 1.2°
顯示參數
成功載入量測資料後,此面板中的所有控制項將變為啟用狀態。
- 案例 ID (Case ID):
允許選擇在 Quickstep 中定義的所有不同測試案例,案例 ID 的分配和設定可從 QuickStep 結果檢視器取得:- yyyy_mm_dd_hh_mm_ss_ms_Name → 1_MyDUT → TestStepsResults.log:
此日誌儲存了每個測試步驟的所有設定以及所使用的相應設定。
- yyyy_mm_dd_hh_mm_ss_ms_Name → 1_MyDUT → TestStepsResults.log:
- 顯示頻率 (Display Frequency):
啟用以 3D 繪圖顯示所有量測資料,或顯示單一頻率。 - 電平範圍 / dBm (Lvl Range / dBm):
允許設定較小的振幅範圍,以突顯訊號中感興趣的特定區域,僅在「自動調整尺度」選項停用時啟用。 - 自動調整尺度 (Autoscale):
若啟用此選項,繪圖資料將自動調整尺度以獲得最佳檢視效果。 - 歸一化 (Normalize):
資料集將相對於量測到的最高值進行歸一化 (normalize),該最高值被設為 0 dB。 - 標記軸向 (Mark Boresight):
0 度方位角軸向 (boresight) 將在繪圖中被突顯顯示。 - 平均 (Average):
將移動平均濾波器 (moving average filter) 應用於原始資料集。
最小干擾 (Minimum Interference)
計算給定量測資料集的最小干擾,較大的結果資料集將提供更好的結果,對於單一資料集,該工具將顯示在這些條件下取得的唯一量測值。
- Frequency (頻率): 將為此頻率計算最小干擾的來源設定。
- User Angle (使用者角度): 對應於所顯示圖形的使用者位置角度。
- Interf. Angle (干擾者角度): 對應於所顯示圖形的干擾者 (interferer) 位置角度。
點擊「Find min. Interf.」(尋找最小干擾) 會開啟一個新視窗,顯示在上述設定下被發現能提供最佳結果(即最大抑制)的測試案例,圖 5-2 顯示了一個範例,頻率為 26.4 GHz,使用者角度為 20°,干擾者角度為 -6 度。
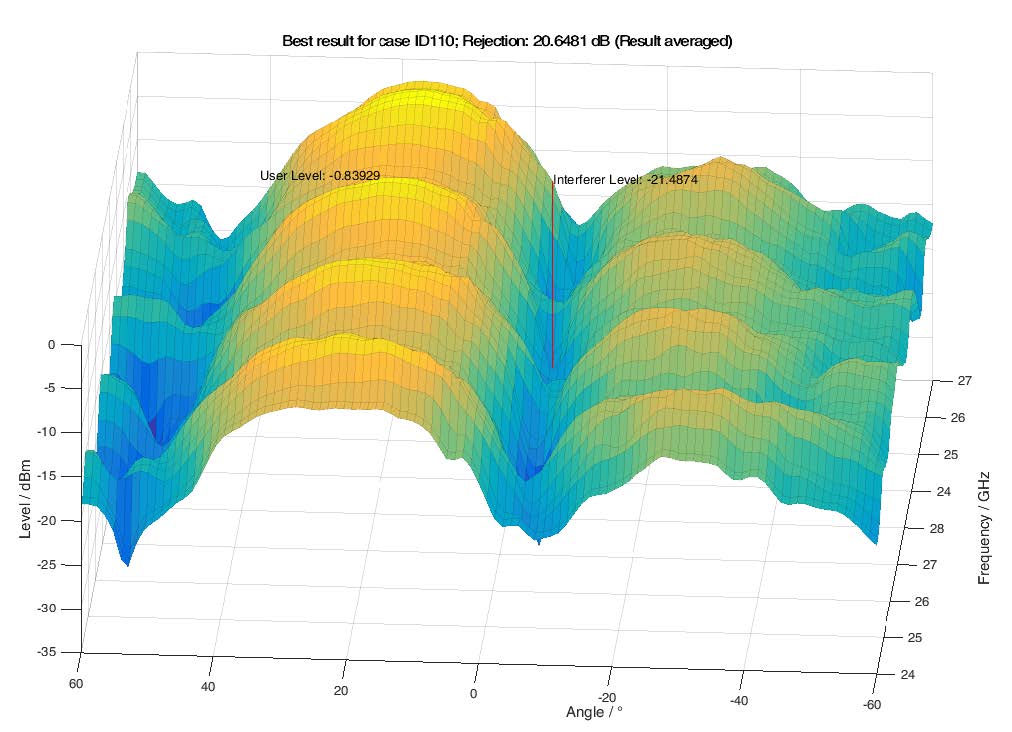
圖 5-2:從量測資料集中提取干擾電平。
模擬
開啟一個新圖窗 (figure),下一節將詳細說明。
測試值計算器
開啟如圖 5-3 所示的對話框,此視圖有助於計算不同天線架構的相移 (phase shift) 或時間延遲 (time delay) 值,在此範例中,一個具有等距元件(間距 68 mm)的天線陣列,其主波束 (main beam) 應被操控 (steered) 至 10° 的角度,因此,所有元件必須設定約 34° 的相位偏移 (phase offset)。
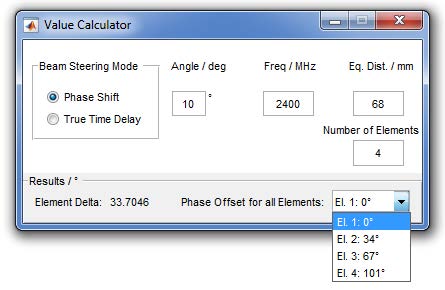
圖 5-3: 測試值計算器視窗
計算輻射場型
透過點擊主對話框中的「Simulate」(模擬) 按鈕,可開啟如圖 5-4 所示的視圖。
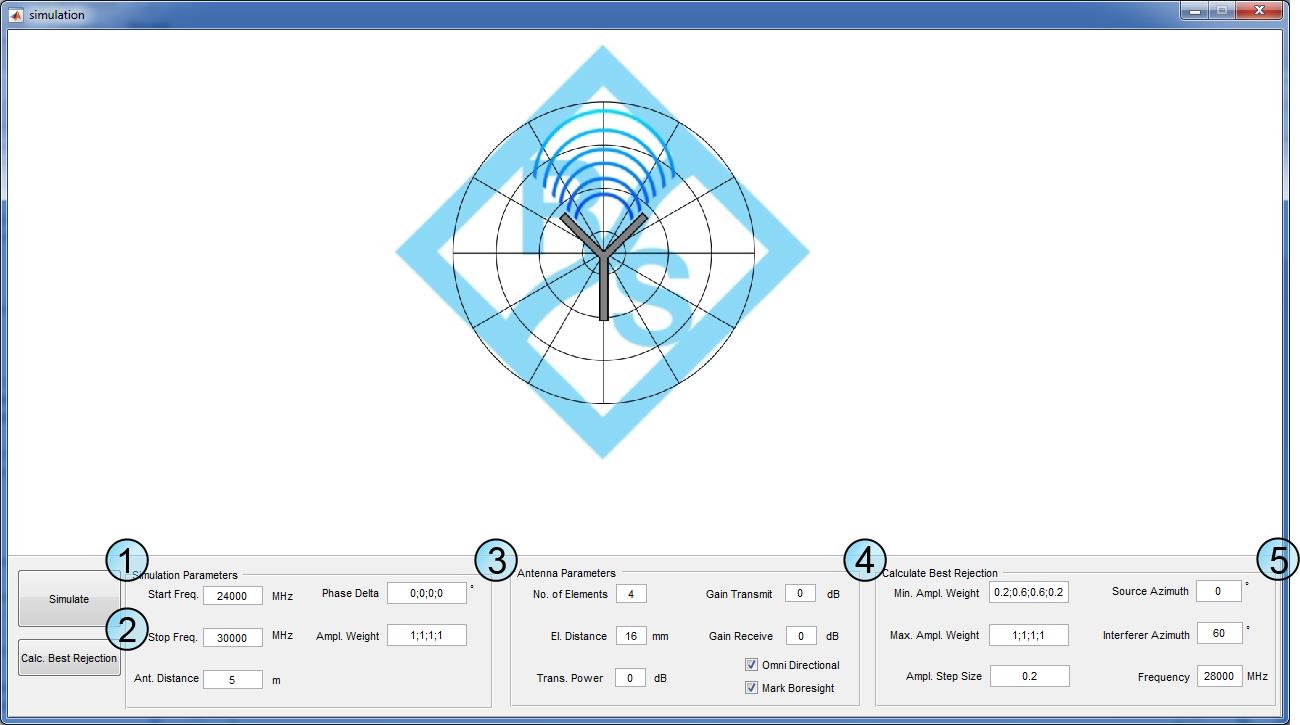
圖 5-4: 模擬視圖
模擬
根據在 2 和 3 中定義的參數,計算近似的陣列場型 (array pattern)。
計算最佳抑制
決定干擾訊號的最佳抑制比 (rejection ratio),此計算的參數可在 5 中設定,結果呈現在給定設定下的最佳振幅權重 (amplitude weights),如圖 5-5 所示;在確定每個元件的最佳權重時,所有權重將從最小值掃描 (swept) 到最大值。
x 軸對應所需訊號 (wanted signal) 的角度,而 y 軸對應干擾訊號 (interfering signal) 的角度,預期的抑制比 (dB) 由右側的色條 (color bar) 編碼,在下方顯示的範例中,所需訊號的電平在 60° 時,比干擾訊號的電平高 26.5 dB。
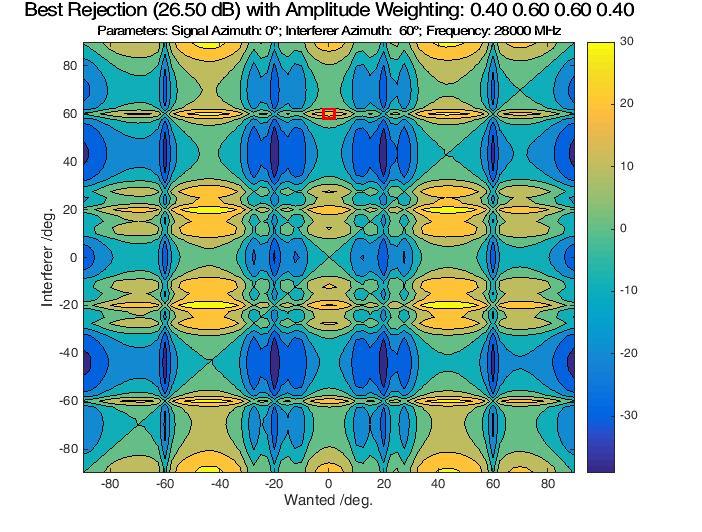
圖 5-5: 最佳抑制比的計算
計算參數
此標籤頁連同下一步驟一起,可用於設定輻射場型計算所使用的參數。
- 起始頻率 (Start Freq.): 設定起始頻率 (MHz)。
- 停止頻率 (Stop Freq.): 設定停止頻率 (MHz)。
- 天線距離 (Antenna Distance):
此值設定天線距離(公尺),用於計算自由空間衰減 (free space attenuation)。 - 相位差 (Phase Delta):
允許為每個元件定義獨立的相位偏移,單位為度 (degrees),因此 "0;45;90;135" 表示第二個元件相對於第一個元件有 45° 的相位偏移,而第三個元件偏移 90°,依此類推。 - 振幅權重 (Ampl. Weight):
可使用此控制項設定每個元件的獨立振幅權重。
天線參數 (Antenna Parameters)
此標籤頁連同上一個步驟一起,可用於設定輻射場型計算所使用的參數。
- 元件數量 (No. of Elements):線性天線陣列中的單一元件數量。
- 元件距離 (El. Distance):所有元件的等距間距 (Equidistant spacing),單位為毫米 (mm)。
- 發射功率 (Trans. Power):發射功率 (dB),用於計算自由空間衰減。
- 發射增益 (Gain Transmit):發射天線增益 (dB),用於計算自由空間衰減。
- 接收增益 (Gain Receive):接收天線增益 (dB)。用於計算自由空間衰減。
- 全向性 (Omni Directional):
- 若勾選此核取方塊,則假設每個天線元件具有全向性 (omnidirectional) 輻射場型。
- 若未勾選此核取方塊,程式將使用單一元件的實際量測資料來改善近似結果。
- 量測結果必須儲存在目前目錄 \files\ 中的 Element_Pattern.mat 檔案中。
- Element_Pattern.mat 是一個結構 (structure),包含以下欄位 (fields):
- Amplitude (振幅): 量測的振幅值 (dBm)。
- vAngle (角度): 量測振幅值的角度 (度)。
- vFrequency (頻率): 量測振幅值的頻率 (GHz)。
- 標記軸向 (Mark Boresight): 此選項將透過標記 0° 角度來突顯天線軸向 (boresight)。
計算最佳抑制
此標籤頁允許設定用於計算最佳抑制比的參數,如 2 中所述。
- 最小振幅權重 (Min. Ampl. Weight):
每個元件的獨立最小振幅權重,可用於決定最佳抑制,對所有允許的振幅值進行掃描時,會從此設定中定義的權重開始。 - 最大振幅權重 (Max. Ampl. Weight):
每個元件的獨立最大振幅權重,可用於決定最佳抑制,對所有允許的振幅值進行掃描時,會在此設定中定義的權重結束。 - 振幅步進大小 (Ampl. Step Size):
從最小值掃描到最大允許值時,振幅權重的步進大小 (step size)。 - 來源方位角 (Source Azimuth):
所需來源訊號的方位角。 - 干擾者方位角 (Interferer Azimuth):
干擾訊號的方位角。 - 頻率 (Frequency):
(用於)決定的頻率。
結論
波束成形天線的應用日益廣泛(例如衛星通訊),並將成為 5G 的骨幹網路,本文闡述如何顯著改進用於波束成形應用(無論控制方式如何)的天線的開發和製造流程(例如子樣本驗證),尤其是在測試傳輸方面;先前天線本身只能在與無線電模組整合之前進行 S 參數的精確測試,從靜態碼本到純動態加權,整個頻譜範圍內的編碼演算法的推導都必須「盲目」進行。
此應用程式改變了這種模式:
在設計階段:
波束成形天線的開發流程得到了解放,例如,設計人員現在可以快速且準確地比較不同的天線原型設計,或開發波束成形演算法和策略;識別這些波束成形行為有助於優化無線電模組的其餘部分,從而縮短開發時間和降低成本,同時最大限度地提高效能。
生產階段:
- 除了簡單的 S 參數外,現在可以直接且準確地驗證單一天線模組的波束成形性能。
- 此驗證測試步驟可在將天線進一步整合到前端之前執行,從而提高良率並降低成本。