
自動駕駛革命的十字路口:技術、法規與商業可行性分析
車輛自動化演進中的格局
自動駕駛技術的發展正處於一個關鍵的轉捩點,儘管技術本身取得了長足的進步,但其商業化和社會接納的步伐,卻日益受到法律、責任和監管框架的深刻影響;本文將深入剖析車輛自動化的基本概念,特別是國際汽車工程師學會(SAE)J3016標準的演變,並論證當前產業最核心的分野並非純粹的技術等級,而是介於Level 2和Level 3之間,由責任歸屬轉移所劃下的法律與商業鴻溝。
解構SAE等級:數字之外的深意
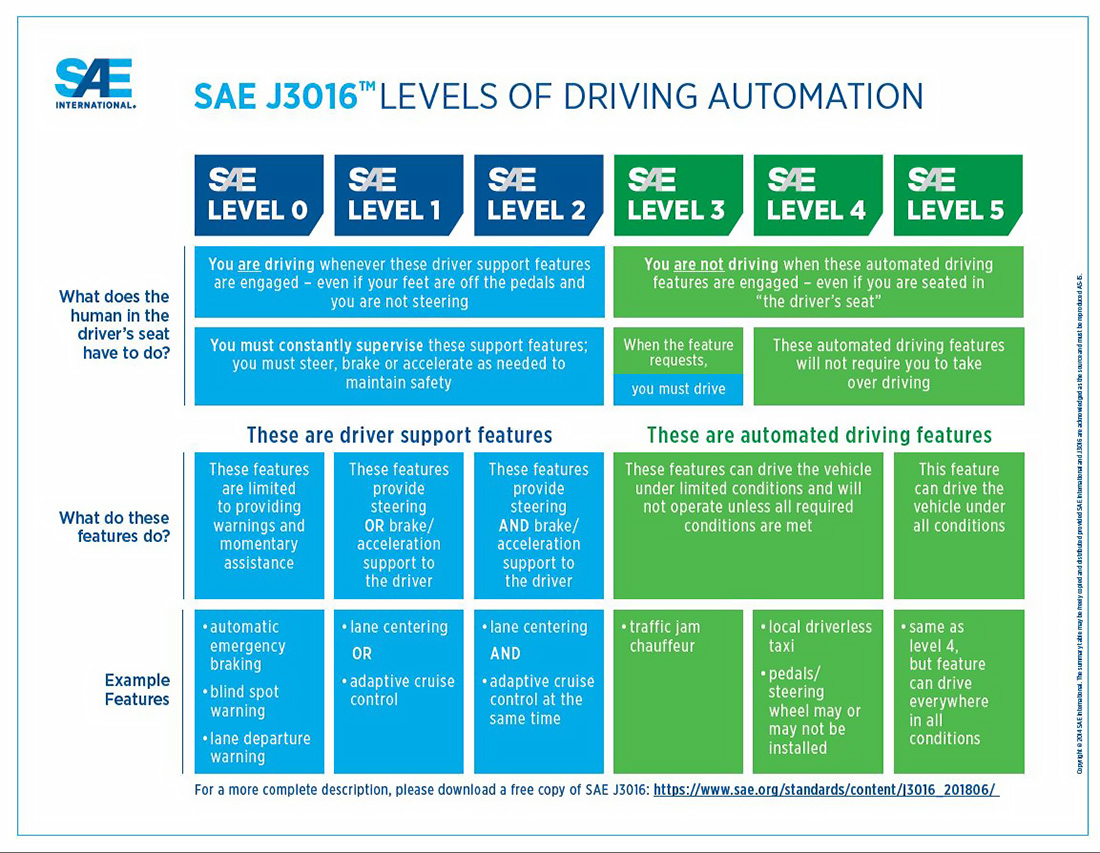
SAE J3016標準為道路機動車輛的自動化程度提供了從0到5共六個等級的分類框架,其核心在於定義人類駕駛員在駕駛迴圈中的角色與責任。
2021年SAE J3016更新:一次深思熟慮的修正
2021年,SAE對J3016標準進行了一次關鍵性更新,這次更新不僅是術語上的微調,更是一次目的在澄清市場混淆、管理責任預期的戰略性修正,其中最重要的變革,是將SAE Level 1和Level 2系統明確命名為「駕駛員輔助系統」(Driver Support Systems),而將Level 3至Level 5系統定義為「自動駕駛系統」(Automated Driving Systems, ADS),這一區隔的背後,反映了標準制定機構對產業中普遍存在的、可能誤導消費者的營銷術語的回應,例如,特斯拉的「全自動駕駛」(Full Self-Driving)功能,儘管名稱暗示了高度自主性,但美國監管機構指出,駕駛員仍需時刻保持警覺並準備隨時接管車輛,這實質上是Level 2系統的特徵,SAE的這次更名,正是為了在技術定義層面建立一道防火牆,明確劃分出駕駛員與系統之間的責任界線。
L2與L3之間的責任鴻溝
自動駕駛等級中最具決定性意義的分界線,存在於Level 2和Level 3之間,這條界線的核心是法律責任的根本性轉移。
Level 2(部分自動化):
在此等級下,即使車輛能夠同時控制轉向和加減速(例如,在高速公路上保持車道和車距),法律上的駕駛責任始終由人類駕駛員承擔,系統的角色是「輔助」,人類則是最終的監督者和責任人;福特的BlueCruise、通用汽車的Super Cruise以及特斯拉的Autopilot/FSD,均屬於此範疇,這種模式使得汽車製造商(OEM)能夠在不承擔直接駕駛事故責任的前提下,大規模推廣先進的駕駛輔助功能。
Level 3(有條件自動化):
這是自動化程度的巨大飛躍,當車輛在其預設的「操作設計領域」(Operational Design Domain, ODD)內啟動L3功能時,法律責任便從駕駛員轉移至汽車製造商,在ODD範圍內,駕駛員被允許將視線移開道路(eyes-off),從事其他活動,但必須保持在系統發出接管請求時能夠及時恢復對車輛的控制,這表示,一旦在L3模式下發生事故,究責的對象將首先指向車輛或其系統的設計與製造缺陷,而非駕駛員的疏忽,這代表著一種巨大的商業風險從消費者轉移到了企業身上。
這種責任轉移的深刻影響,解釋了為何市場上L2和L3系統的商業化策略呈現出截然不同的面貌,OEM廠商可以相對積極地推廣和銷售L2功能,因為其法律風險可控;而對於L3功能,則採取了極為謹慎的態度,其商業化部署不僅速度緩慢,而且ODD的限制也極其嚴格。
「多支柱」驗證與安全路徑
為了跨越這道責任鴻溝,並獲得監管機構的批准和公眾的信任,產業發展出了一套被稱為「多支柱」的安全驗證方法論,這套方法論目的在透過多層次的測試,全面評估自動駕駛系統的安全性與可靠性。
- 模擬測試(Simulation):這是安全驗證的基礎,透過在虛擬環境中運行數十億甚至數百億公里的模擬,開發者能夠高效地測試系統在各種交通場景下的反應,特別是那些在現實世界中極為罕見但至關重要的「邊緣案例」(edge cases)。
- 封閉場域測試(Closed-Track Testing):在模擬測試之後,系統會被部署到封閉的測試場地,在這裡工程師可以安全地重現和驗證那些在模擬中發現的,或是在現實世界中難以複製的危險情境,例如:緊急煞車、避障等。
- 公開道路測試(Public Road Testing):這是驗證系統在真實、不可預測的交通環境中表現的關鍵一步,測試車輛在配備安全駕駛員的情況下,在公開道路上行駛,收集真實世界的數據;然而,鑑於其潛在風險,各國對公開道路測試的監管日益嚴格,例如,中國近期就收緊了對「公開測試」的管理,要求必須經過官方批准。
- 數據記錄與分析(Data Logging and Analysis):每輛測試和部署的自動駕駛車輛都配備了類似「黑盒子」的數據儲存系統(Data Storage System for Automated Driving, DSSAD),該系統會持續記錄車輛的感測器數據、系統狀態和駕駛決策,一旦發生事故,這些數據將成為釐清事故原因、判定責任歸屬(是系統故障還是人為失誤)的最關鍵證據。
總而言之,SAE標準的演變與「多支柱」驗證方法的確立,共同勾勒出自動駕駛產業發展的核心邏輯:技術的進步必須與嚴格的法律責任框架和可信的安全驗證流程相匹配;在L3及以上等級的自動駕駛中,安全不再僅僅是一個技術指標,更是一個必須在法律和商業層面被嚴格證明和承擔的責任。
2025年的技術堆疊:從晶片到軟體
自動駕駛車輛的實現,依賴於一個高度複雜的技術堆疊,其核心由兩大支柱構成:感知世界的感測器硬體,以及做出決策的軟體大腦,進入2025年,這兩大領域都呈現出革命性的變化,硬體正朝向高性能、低成本和商品化的方向發展,而軟體架構則經歷著從傳統模組化向端到端(End-to-End)模型的範式轉移。
感知革命:多模態融合之道
為了創建對周圍環境全面而可靠的3D模型,自動駕駛系統採用了多種感測器互為補充的策略,即「感測器融合」。
光達(LiDAR)的普及之路
光達作為實現高階自動駕駛的關鍵感測器,其市場正在經歷爆炸性增長,預計到2025年市場規模將達到7.23億美元,這一增長的背後是技術進步與成本下降的雙重驅動。
- 技術轉變與成本驟降:產業正從體積龐大、帶有機械旋轉部件的機械式光達,迅速轉向更可靠、更緊湊、成本更低的固態光達,微機電系統(MEMS)反射鏡和先進的矽光子晶片等技術是實現這一轉變的關鍵,成本已從過去的數萬美元驟降至1000美元以下,部分入門級產品在2025年甚至接近200美元,這使得光達的大規模商業部署成為可能。
- 核心組件的演進:在發射端,產業趨勢是從傳統的邊射型雷射器(EELs)轉向更易於陣列化、功耗更低的垂直共振腔面射型雷射(VCSELs);在接收端,靈敏度更高的矽光電倍增管(SiPMs)和單光子雪崩二極體(SPADs)正在取代傳統的雪崩光電二極體(APDs),這不僅提升了性能,也促進了感測器的微型化。
- 性能的飛躍:新一代光達的性能實現了指數級提升;解析度(每秒點數)從過去的幾十萬點躍升至驚人的2400萬點,探測距離也從150公尺延伸至300公尺,這對於高速公路場景下的安全至關重要。
不可或缺的配角:雷達與攝影機
- 雷達(Radar):憑藉其在惡劣天氣(如雨、雪、霧)下的穩定表現以及直接測量物體相對速度的能力,雷達在感測器套件中仍然佔有不可替代的地位,先進的4D成像雷達正在提升其解析度,使其能夠提供更豐富的環境細節,部分彌補了傳統雷達的不足。
- 攝影機(Camera):攝影機是唯一能夠提供豐富色彩和紋理資訊的感測器,這對於交通號誌識別、車道線檢測和物體分類至關重要,在強大的人工智慧神經網路驅動下,僅依靠攝影機的視覺方案在深度感知方面的準確性日益提高,但其性能在弱光或強光等極端光照條件下仍會受到限制。
感測器融合:建構感知的基石
由於沒有任何單一感測器是完美的,感測器融合成為了必然選擇,該技術目的在結合光達的精確3D測繪能力、雷達的全天候測速能力以及攝影機的豐富語義理解能力,從而創建一個比任何單一來源都更準確、更可靠、更具冗餘性的環境感知模型;然而,感測器融合也面臨著嚴峻的挑戰,包括如何確保各感測器數據的品質、實現精確的時空同步標定,以及處理多數據流所帶來的巨大即時運算壓力,人工智慧演算法、邊緣運算和5G通訊等技術的發展,正為解決這些挑戰提供關鍵支援。
車輛之腦:軟體範式的轉移
如果說感測器是車輛的眼睛和耳朵,那麼軟體就是其做出決策的大腦,近年來,自動駕駛的軟體架構正在發生一場深刻的範式革命。
端到端(End-to-End)架構的崛起
傳統的自動駕駛系統採用模組化的設計,即「感知-預測-規劃-控制」的序列式流程,這種架構的缺點在於,每個模組的誤差都會向下一個模組累積,可能導致最終決策的偏差,為了解決這個問題,業界正轉向端到端(E2E)架構,E2E模型試圖建立一個單一的、可微分的深度神經網路,直接將原始的感測器輸入映射到最終的車輛控制指令(如轉向和加減速),目的在提升系統的整體性能、簡化開發流程並增強其可擴展性。
新型AI模型的驅動作用
E2E架構的實現離不開人工智慧模型的突破性進展。
- Transformer模型:這種最初應用於自然語言處理的模型,因其強大的序列數據處理能力,現已被廣泛應用於處理自動駕駛中的時空數據,模型如DriveTransformer,能夠同時處理來自多個感測器的時間序列資訊,從而更深刻地理解複雜的交通動態。
- 世界模型(World Models):這類模型不僅僅是被動地處理輸入數據,它們還會學習一個關於環境動態的內在表徵(或稱「世界模型」),這使得AI能夠在內部「想像」或「預測」不同行動可能導致的未來場景,從而做出更具前瞻性的規劃,這是基於強化學習(RL)方法的重點研究方向。
- 視覺語言模型(VLMs):為了彌補純E2E模型在應對新奇或複雜場景時可能出現的「缺乏常識」問題,研究人員開始將大型視覺語言模型整合到自動駕駛系統中,例如SOLVE框架,試圖利用VLM的常識推理能力來增強系統對駕駛環境的理解,並提升決策的可解釋性和安全性。
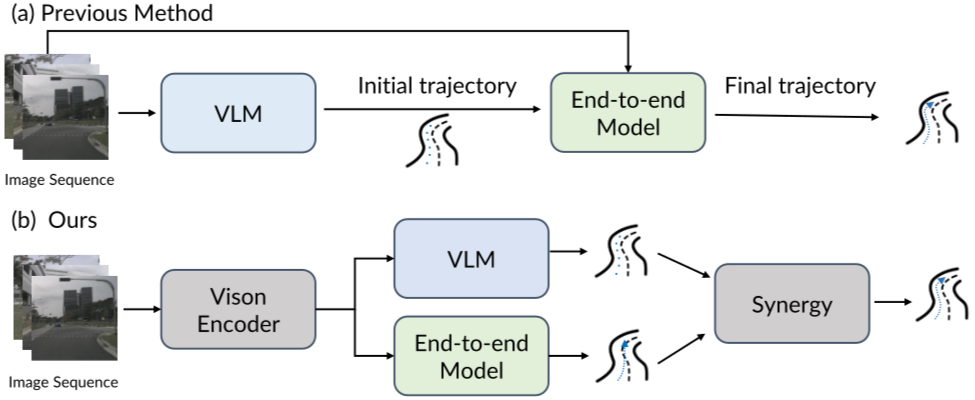
這張圖展示了一種名為 SOLVE 的新型自動駕駛AI模型架構,其核心理念是融合「視覺語言模型 (VLM)」與「端到端 (End-to-End) 模型」的優勢,SOLVE模型讓兩種AI模型各自發揮所長並互補不足,從而做出既符合邏輯(VLM的貢獻)又操作平穩(端到端模型的貢獻)的駕駛決策,提升了自動駕駛系統的可靠性。
這些先進模型都極度依賴數據;一個E2E系統的性能優劣,與其訓練數據的規模、品質和多樣性直接相關,這催生了一個強大的正回饋循環:擁有最大規模車隊、在最多樣化道路上運行的公司,能夠收集到最優質的數據,從而訓練出最先進的AI模型,進而鞏固其競爭優勢。
一個強大且自我強化的「硬體-數據-軟體」回饋循環已經形成,而中國目前正在這個循環中佔據主導地位,這個循環是理解當前全球自動駕駛技術競賽中最重要的戰略動態,首先,在硬體層面,中國製造商正在引領光達的量產和成本降低,使其在經濟上可以被大規模部署,甚至應用於平價車型,其次,這種大規模部署在中國複雜的道路上產生了海量、多樣且具有獨特性的數據,這些「中國數據」對於訓練能夠適應中國交通環境的模型至關重要;最後,在軟體層面,最先進的E2E和世界模型是數據驅動的,擁有最佳數據的公司能夠訓練出最強大的模型,這個循環— 更便宜的硬體促成更廣泛的部署,從而產生更優質的數據,進而訓練出更強大的軟體— 為中國企業構築了一道堅實的競爭護城河,這也解釋了為何特斯拉急於將其FSD系統推進中國市場,因為它迫切需要接入這個數據循環以保持其在中國市場的競爭力,同時也解釋了美國政府對此類數據安全日益增長的擔憂。
全球監管的挑戰:比較分析
自動駕駛的發展不僅是一場技術競賽,更是一場監管哲學的較量,在全球三大主要市場 — 美國、歐盟和中國 — 以及一個獨具特色的小型經濟體台灣,我們看到了截然不同的監管路徑,這些路徑不僅反映了各國對創新與安全之間平衡的不同取態,更日益成為實現產業政策和地緣政治目標的工具。
美國:邁向全國框架的碎片化路徑
美國的自動駕駛監管格局呈現出一種獨特的「碎片化」特徵,其核心在於聯邦與州政府之間的持續博弈。
- 聯邦與州的權力博弈:國家公路交通安全管理局(NHTSA)負責制定聯邦機動車安全標準(FMVSS),並尋求建立一個統一的全國性監管框架;然而,車輛的測試和商業部署許可權,卻掌握在各州監管機構手中,其中以加州車輛管理局(DMV)最具影響力,這種雙軌制導致了法規的不一致和不可預測性。
- NHTSA態度的轉變:早期,NHTSA的監管步伐相對緩慢,然而,近年來,面對技術的快速發展和來自中國的競爭壓力,其態度發生了顯著轉變;2025年6月,NHTSA宣布將精簡豁免審查程序,允許製造商每年部署最多2,500輛不配備方向盤、煞車踏板等傳統手動控制裝置的自動駕駛汽車,這一舉措被視為打破先前僵局、為真正意義上的無人駕駛汽車商業化掃除障礙的關鍵一步。
- 地緣政治的潛在影響:美國的產業政策越來越多地被置於「與中國競爭」的框架下進行審視,出於對數據安全的擔憂,美國政界出現了限制中國自動駕駛公司在美運營、阻止其將在美測試數據傳回中國的呼聲,這表明,監管不僅是安全問題,也已成為地緣政治博弈的籌碼。
- 結果:美國形成了一個複雜、多變且充滿訴訟風險的監管環境,這種「拼布式」的法規體系,使得任何一家公司,無論是國內還是國外,都難以實現全國範圍內的大規模、標準化部署。
歐盟:透過協調實現標準化
與美國的碎片化形成鮮明對比,歐盟採取了一種更為系統化、協調統一的監管路徑,其核心是透過聯合國歐洲經濟委員會(UNECE)的世界車輛法規協調論壇(WP.29)制定具有國際約束力的法規。
- UNECE框架:歐盟的監管方法以全面、前瞻和協調為特點,其制定的法規不僅適用於歐盟成員國,也為包括英國、土耳其、澳大利亞在內的50多個國家所採納,形成了一個廣泛的統一市場。
- UN R157(ALKS):這是全球首個針對Level 3自動駕駛系統(自動車道維持系統,ALKS)的具有法律約束力的國際法規,是歐盟監管框架的基石。
- 初始版本:2021年實施的初始版本對L3系統的運行條件限制非常嚴格,僅允許在高速公路上以低於60公里/小時的速度運行,且僅適用於M1類乘用車。
- 2023年關鍵修正案:2023年1月生效的01系列修正案極大地擴展了L3系統的商業應用潛力,它將最高運行速度提升至130公里/小時,首次允許系統執行自動車道變換,並將適用範圍擴展到N類商用車,這一修訂使得L3功能從一個有限的「交通擁堵輔助」變為一個更具實用價值的高速公路巡航功能。
- 配套法規體系:R157並非孤立存在,它與 UN R155(網路安全)和UN R156(軟體更新)共同構成了一個三位一體的監管體系,為車輛的型式認證提供了全面的法律框架。
- 結果:歐盟建立了一個發展步伐較為穩健、但高度可預測和穩定的監管環境,它為汽車製造商提供了清晰的、跨國界適用的規則,降低了合規成本,促進了區域內市場的統一。
中國:自上而下的加速與管控
中國的監管模式展現了國家主導下的強大動員能力和靈活的政策調整。
- 國家戰略目標:中國政府已將智能網聯汽車(ICV)確立為國家戰略性新興產業,並制定了宏大的發展目標:到2025年,實現L3級有條件自動駕駛汽車的規模化生產,並在特定環境下實現L4級高度自動駕駛汽車的市場化應用。
- 「先部署,後規範」的循環:在發展初期,中國政府透過積極的產業政策、巨額的基礎設施投資(如5G-V2X通訊網路、高精度地圖)和地方先行先試,極大地促進了技術的快速部署和數據積累。
- 2025年的監管收緊:隨著市場的快速擴張,安全事故和誤導性營銷等問題也開始浮現,為此中國工業和信息化部(MIIT)在2025年4月左右出台了一系列嚴格的新規,對產業進行了及時的規範,這些新規包括:
- 禁止未經官方批准的「千人、萬人」規模的公開測試活動。
- 嚴格規範營銷術語,禁止使用「自動駕駛」、「無人駕駛」等詞彙,強制要求使用「L (數字) 級輔助駕駛」的標準化命名。
- 禁止無駕駛員監管的功能,如遠程代客泊車和一鍵召喚。
- 嚴格限制空中下載(OTA)軟體更新的頻率和流程,緊急更新需納入召回管理。
- 數據主權:中國對汽車數據的跨境流動實施嚴格的監管,2025年6月發布的《汽車數據出境安全管理指南(徵求意見稿)》要求數據處理者必須經過安全評估等程序才能將數據傳輸至境外,這實質上要求源自中國車輛的數據必須在中國境內進行處理。
- 結果:中國形成了一個獨特的國家主導型生態系統,它既能以驚人的速度推動產業發展,也能在必要時迅速轉向,實施嚴格的集中管控,這為國內外企業創造了巨大的機遇,也帶來了獨特的政策風險。
台灣:敏捷治理的案例研究
作為一個小型經濟體,台灣在自動駕駛監管方面採取了一種務實而靈活的策略。
- 沙盒模式:台灣於2018年通過並實施的《無人載具科技創新實驗條例》,其核心是建立一個「監理沙盒」(Regulatory Sandbox)機制,該條例允許創新實驗計畫在特定時間和範圍內,豁免適用部分現行交通法規的處罰規定,為新技術的實地測試創造了一個合法、安全的空間。
- 實證成效:該模式已成功推動了至少18個多元化的實驗計畫在全台各地落地,涵蓋自駕巴士、物流車、觀光接駁船等多種應用場景,這些實驗不僅測試了技術的可行性,更積累了關於運營模式、公眾接受度和現實挑戰的寶貴數據,例如,工研院在桃園機場進行的時速50公里的接駁測試,是目前台灣速度最快的自駕沙盒實驗。
- 學習與適應:沙盒實驗的經驗,幫助政府清晰地識別出台灣特有的挑戰,例如:如何應對汽機車混流的複雜交通環境,以及現行保險和責任法規的不足,政府利用這些第一手經驗,滾動式地修訂相關法規和技術指引,例如:數位發展部在2025年2月修正了實驗可用的無線電頻率條件,交通部也發布了自駕公車的實驗運行安全指引。
- 結果:台灣的監理沙盒模式,體現了一種在鼓勵創新與管理風險之間取得平衡的敏捷治理方法,它非常適合小型經濟體在資源有限的情況下,以較低的試錯成本,探索新興科技的發展路徑,為其他國家提供了有價值的借鑑。
| 特性 | 美國 | 歐盟 | 中國 |
|---|---|---|---|
| 治理模式 | 聯邦與州共管,碎片化 | UNECE框架,協調統一 | 中央政府主導,自上而下 |
| 核心監管機構 | NHTSA / 各州DMV | UNECE / 各國認證機構 | 工業和信息化部 (MIIT) |
| 核心法規 | FMVSS豁免程序 | UN R157 (ALKS) | MIIT相關通知與指南 |
| L3最高速度 | 視各州批准而定 | 130 km/h | 視批准情況而定,無統一標準 |
| L3允許變換車道 | 視各州批准而定 | 是 | 視批准情況而定 |
| 操作設計域 (ODD) | 由製造商定義,州政府審批 | 由製造商定義,需通過型式認證 | 由製造商定義,需通過官方審批 |
| 駕駛員監控 | 要求嚴格的監控系統 | 要求駕駛員保持接管能力 | 強制要求駕駛員監控,手離方向盤不得超過60秒 |
| 數據治理 | 關注數據安全,有對華限制趨勢 | 遵循GDPR,強調個人隱私保護 | 嚴格的數據出境管制,強調數據主權 |
| 總體特點 | 靈活但不可預測,訴訟風險高 | 穩健但保守,可預測性強 | 發展迅速但政策多變,國家控制力強 |
市場動態與商業化策略
隨著技術的成熟和法規的逐步落地,自動駕駛產業的商業化競賽已進入白熱化階段,市場上主要形成了兩條截然不同的發展路徑:一條是以實現完全無人駕駛計程車(Robotaxi)為目標的高風險、高回報賽道;另一條則是傳統汽車製造商(OEM)所採取的,從高級駕駛輔助系統(ADAS)向更高階自動駕駛逐步演進的漸進式賽道,下文將透過對關鍵參與者的案例分析,揭示這兩種策略的內在邏輯與市場現實。
Robotaxi競賽:一場策略的較量
Robotaxi被視為自動駕駛技術的終極應用場景,但其高昂的研發成本、複雜的運營挑戰和嚴苛的監管要求,使得這條賽道充滿了不確定性,Waymo和Cruise的迥異命運,為我們提供了深刻的教訓。
Waymo:穩健的馬拉松選手
- 策略:作為Google自動駕駛項目的繼承者,Waymo從一開始就採取了極為穩健和審慎的擴張策略;其核心思想是,在進入一個新城市之前,必須透過長時間的數據採集和測試,積累數百萬公里的自動駕駛里程,以確保系統的安全性,並與當地監管機構建立牢固的互信關係。
- 2025年現狀:Waymo的耐心得到了回報,截至2025年,它已在美國多個主要城市,包括鳳凰城、舊金山、洛杉磯和奧斯汀等,成功運營著商業化的、完全無需安全員的Robotaxi服務,其車隊規模超過1,500輛,每週提供超過250,000次付費行程,累計的完全自動駕駛里程已超過1.6億公里。
- 擴張步伐:Waymo正在加速其擴張步伐,公司正與製造業巨頭Magna合作,在美國亞利桑那州投資建設一座新的自動駕駛汽車工廠,計劃生產數萬輛配備其最新Waymo Driver系統的車輛,這將為其進軍亞特蘭大、邁阿密等新市場提供充足的運力保障。
Cruise:曇花一現的短跑選手
- 策略:在通用汽車(GM)的雄厚資本支援下,Cruise採取了與Waymo截然相反的激進擴張策略,它試圖在短時間內,同時在多個城市快速推出其Robotaxi服務,以搶佔市場先機。
- 崩潰的導火線:2023年10月,一起嚴重的事故成為了Cruise命運的轉捩點,在舊金山,一輛Cruise的Robotaxi在與另一輛人類駕駛的汽車碰撞後,未能準確識別被撞倒在地的行人,並在隨後的操作中將其拖行了數公尺,更致命的是,公司在向監管機構(加州公用事業委員會)匯報此事時,被指控隱瞞了拖行的關鍵細節,徹底摧毀了監管機構和公眾的信任。
- 最終的結局:這起事件引發了連鎖反應,Cruise的所有無人駕駛測試許可被吊銷,公司進行了大規模裁員和高層改組,最終,在巨大的虧損和品牌聲譽的崩塌下,通用汽車於2024年12月宣布,將停止對Cruise Robotaxi業務的資助,這家曾經的明星新創公司就此落幕,其剩餘的技術團隊將被整合進通用汽車內部,轉而專注於為個人車輛開發ADAS功能,這標誌著一次徹底的戰略潰敗。
OEM戰場:從ADAS到自動駕駛
與Robotaxi 不同,傳統OEM廠商的自動駕駛之路更加務實和漸進,它們的核心策略是,將自動駕駛技術作為提升產品競爭力的功能,從相對成熟的L2級ADAS開始,逐步向上探索。
案例分析:特斯拉FSD - 全球雄心與本土挑戰
- 產品定位:特斯拉的FSD(Full Self-Driving)是一個功能極其強大的Level 2+系統,其核心策略是利用其龐大的全球消費車隊作為數據採集器,透過OTA軟體更新,不斷迭代和提升系統的能力。
- 全球擴張:2025年,特斯拉計劃將FSD正式推向中國和歐洲市場,這一步對其至關重要,不僅是為了開闢新的收入來源,更是為了獲取這兩大市場獨特的、海量的駕駛數據,以訓練和優化其AI模型。
- 面臨的阻力:特斯拉的擴張之路並非坦途;在中國,它面臨著來自蔚來、小鵬等本土競爭對手的激烈挑戰,這些對手在感測器配置(如標配光達)和定價策略上更具優勢;在監管層面,無論是在美國(因其「全自動駕駛」的命名而備受爭議)還是在中國(因其「用戶公測」模式和營銷術語而被新規禁止),特斯拉都面臨著日益嚴格的審查。
案例分析:賓士Drive Pilot - 謹慎的認證之路
- 產品定位:賓士的Drive Pilot是全球首個獲得國際認證(UN R157)的Level 3有條件自動駕駛系統。
- 策略核心:賓士採取了「法規先行」的極度保守策略,其Drive Pilot的ODD被嚴格限制在極其特定的場景內:僅限於部分認證高速公路、交通擁堵、時速低於40英里(約64公里)、且天氣良好,這種嚴格的限制並非完全出於技術瓶頸,而是一種主動的法律風險管理策略,目的在將公司承擔L3責任的範圍最小化。
- 未來展望:儘管L3的部署極為謹慎,賓士並未停止向更高階自動駕駛邁進的步伐,公司已在北京等複雜的城市環境中,積極測試其Level 4系統,這表明其長遠目標是在技術和法律框架成熟後,逐步提升其產品的自動化水平。
案例分析:福特BlueCruise - 贏在L2+賽道
- 產品定位:福特的BlueCruise是一個功能強大且市場反響良好的Level 2+高速公路「放手」駕駛輔助系統。
- 策略核心:福特的策略極為務實,它選擇專注於一個商業上成功、法律風險可控的ADAS功能,並將其快速擴展到旗下最暢銷的車型上,如 F-150皮卡、Mustang Mach-E,並計劃推廣至Bronco、Ranger和Mustang等更多車型。
- 對L3的態度:福特高層已明確表示,公司不會在2025年推出Level 3系統,坦誠地承認了該技術的複雜性和挑戰性,公司選擇先將L2+系統打磨到極致,積累用戶數據和信任,並將其作為未來在2026年或之後推出L3系統的基礎,這是一種以營收和風險控制為導向的明智策略。
| 系統名稱 | 主導公司 | 宣稱的SAE等級 | 主要感測器方案 | 核心功能/場景 | 商業化現狀與規模 |
|---|---|---|---|---|---|
| Waymo Driver | Waymo (Alphabet) | Level 4 | 光達為主,融合雷達、攝影機 | 城市Robotaxi服務 | 在美國多個城市商業運營,車隊>1,500輛,每週>25萬次付費行程 |
| FSD (Full Self-Driving) | Tesla | Level 2+ | 純視覺(攝影機)為主 | 高速公路自動輔助駕駛,城市街道輔助駕駛(Beta版) | 全球數十萬用戶訂閱/購買,計劃2025年進入中國/歐洲市場 |
| DRIVE PILOT | Mercedes-Benz | Level 3 | 光達、雷達、攝影機、濕度感測器 | 高速公路擁堵路況下的有條件自動駕駛(ODD極為嚴格) | 在德國、美國部分州認證可用,速度和場景限制嚴格,規模有限 |
| BlueCruise | Ford | Level 2+ | 雷達、攝影機 | 高速公路「放手」駕駛輔助 | 在北美和歐洲超過13萬英里的預定路網可用,已裝備超過75萬輛車 |
未解的邊界:責任、倫理與社會衝擊
儘管自動駕駛的硬體和軟體技術日新月異,但真正制約其大規模普及的,已不再是純粹的技術瓶頸,一系列深刻的、非技術性的挑戰——法律責任的界定、演算法的倫理困境、數據隱私與安全——構成了產業發展必須跨越的「未解邊界」,解決這些問題,對於贏得公眾信任和實現商業可行性,其重要性甚至超過了對感測器精度或AI模型的下一次迭代。
責任的重大轉移:從駕駛員過失到產品責任
- 法律共識的形成:當一輛處於Level 3或更高等級自動駕駛模式(且在其ODD範圍內)的車輛發生事故時,法律審查的焦點將從駕駛員的行為,轉向車輛及其系統的性能,潛在的責任主體不再僅限於駕駛員,而是擴展到一個複雜的鏈條,包括汽車製造商、軟體開發商、感測器等零部件供應商,甚至是車輛的維護服務提供商。
- 法律框架的演變:以人類駕駛員的「過錯」為核心的傳統交通法規,在面對由機器決策引發的事故時,顯得力不從心,法律界普遍認為,涉及高階自動駕駛汽車的事故索賠,將越來越多地適用於「產品責任法」的框架,在該框架下,受害者需要證明事故是由於產品(即車輛或其系統)存在設計或製造上的缺陷所導致的。
- 「人機共駕」的困境:Level 3系統所創造的「人機共駕」模式,是目前法律上最模糊、最具挑戰性的地帶,系統要求駕駛員在必要時接管,但「必要時」的定義、系統發出接管請求的「及時性」和「合理性」、以及駕駛員需要多長時間做出反應,都缺乏明確的法律標準,如果系統發出接管請求後,駕駛員因分心未能及時反應而導致事故,責任應如何劃分?這個問題的答案,將由未來一系列具有里程碑意義的判例來界定。
- 「黑盒子」的決定性作用:在所有事故調查中,車載數據記錄儀(DSSAD)將扮演至關重要的角色,它所記錄的數據—系統是否處於自動駕駛模式、是否發出接管請求、駕駛員是否做出反應—將成為判定責任歸屬、區分是系統失效還是人為失誤的決定性證據。
倫理演算法:從電車難題到現實偏見
自動駕駛的倫理討論,常常始於著名的「電車難題」(Trolley Problem)—在不可避免的碰撞中,系統應該選擇保護乘客還是保護行人,然而,儘管這個思想實驗有助於引發公眾思考,產業面臨的真實倫理挑戰卻更為實際和緊迫。
- 演算法偏見(Algorithmic Bias):這是一個更為現實的倫理風險,自動駕駛系統的性能高度依賴其訓練數據,如果訓練數據主要來自某個特定地區或人群,那麼系統在面對其他不同環境或人群時,其安全表現可能會下降,例如,一個主要在美國郊區訓練的系統,可能難以準確預測亞洲人口密集城市中行人和非機動車的行為模式,這可能導致一種基於地理和文化的「歧視性」安全結果。
- 透明度與可解釋性:許多先進的AI模型,特別是深度神經網路,其決策過程如同一個「黑盒子」,外界很難理解系統為何會做出某個特定的駕駛決策,這種不透明性不僅給事故後的責任認定帶來了巨大困難,也嚴重影響了公眾對這項技術的信任。
- 尋求「演算法正義」:為應對這些挑戰,研究人員正在探索超越簡單功利主義計算的倫理框架,例如,有學者提出可以設計基於「最大化最小值」(maximin)原則的碰撞演算法,即在所有可能的糟糕結果中,選擇那個「最不壞」的選項,以此作為一種可以在法庭上被辯護的、更具公平性的倫理決策依據。
數據即石油:隱私與安全
自動駕駛汽車是移動的數據收集中心,其產生的海量數據在帶來巨大價值的同時,也引發了嚴峻的隱私和安全擔憂。
- 無所不在的數據採集:一輛自動駕駛汽車透過其感測器,會持續不斷地收集關於車輛位置、行駛軌跡、周圍環境的詳細影像,甚至車內乘客的狀態等高度敏感的資訊。
- 隱私風險:這些數據可以輕易地勾勒出一個用戶完整的日常生活圖譜,這使其成為極具價值的商業目標(用於精準廣告等)和潛在的政府監控工具。
- 網路安全威脅:車輛的高度聯網特性,使其成為網路攻擊的潛在目標,惡意行為者可能透過遠程攻擊,癱瘓一輛甚至一個城市的車隊,或者利用車輛的感測器進行間諜活動,這種擔憂在日益緊張的國際關係背景下尤為突出,已成為中美等國制定相關政策時的重要考量。
- 監管應對:為了應對這些風險,各國政府正在建立日益嚴格的數據治理法規,歐盟的《通用數據保護條例》(GDPR)和中國嚴格的數據出境安全管理規定,都在為數據的收集、使用和跨境流動設定法律邊界,這也進一步加劇了全球市場的碎片化。
這些法律和倫理挑戰並非遙遠的未來議題,它們正在積極地塑造著當今的產品設計、企業戰略和國際關係,Level 3系統之所以推廣緩慢,其背後最深層的原因正是責任轉移帶來的巨大法律風險,例如,賓士為其Drive Pilot設定的極其嚴苛的ODD,本質上是一種法律防禦策略,目的在將其承擔責任的場景壓縮到最小、最可控的範圍內;同樣,福特公開宣布推遲L3系統的發布,也是對這種巨大法律和財務風險的直接回應;因此可以說,當前阻礙「放眼」自動駕駛在消費級車輛中普及的最大障礙,已非技術本身,而是企業在現行法律框架下,尚無法或不願承擔隨之而來的、幾乎沒有上限的產品責任。
戰略展望與建議(2026-2030年)
綜合以上對技術、法規、市場和法律倫理等多個維度的分析,本文對自動駕駛產業在未來五年的發展軌跡提出以下戰略展望與建議,產業正從技術驅動的探索期,步入一個由商業可行性、法規成熟度和公眾信任度共同決定的落地應用期。
大規模採用的關鍵障礙
儘管前景廣闊,自動駕駛要實現大規模普及,仍需克服以下幾個關鍵障礙:
- 技術層面:對於Level 4/5系統而言,核心挑戰在於解決所謂的「長尾問題」,即如何處理那些極端罕見但可能致命的邊緣駕駛場景。
- 法規層面:全球範圍內缺乏統一的安全標準和測試協定,且監管政策日益成為地緣政治博弈的工具,這增加了跨國企業的合規成本和不確定性。
- 成本層面:雖然感測器成本持續下降,但整個自動駕駛系統的整合成本、冗餘設計和驗證費用依然高昂,限制了其在主流車型上的應用。
- 責任層面:針對L3及以上等級自動駕駛事故的法律責任框架仍不清晰、不完善,這已成為OEM廠商大規模部署「放眼」功能的最大制動器。
- 公眾信任:一系列高調的事故,特別是Cruise的失敗案例,對公眾信心造成了打擊,重建和培養用戶對機器的信任,將是一個漫長而艱鉅的過程。
未來軌跡:一個分化的市場
展望2026至2030年,自動駕駛市場將呈現出明顯的「雙軌發展」態勢:
- 軌道一(地理圍欄內的L4/L5應用):以Robotaxi和自動化商業物流為代表的賽道將繼續發展,其主要模式將是在特定的、受控的環境中(如人口稠密的城市核心區、大型物流樞紐、工業園區或大學校園)提供服務,這條軌道的特點是資本極度密集、運營複雜,且在可預見的未來,其地理範圍將受到嚴格限制,Waymo和亞馬遜旗下的Zoox是這條賽道上的主要玩家。
- 軌道二(消費級車輛的L2+/L3應用):這將是未來幾年自動駕駛技術最主要的商業化戰場和收入來源,市場將會看到大量功能更強大、體驗更流暢的L2+級「放手」高速公路輔助駕駛系統的普及,與此同時,ODD極為有限的L3級「交通擁堵輔助」功能也將在更多高端車型上出現,但其部署將非常謹慎,OEM廠商將在這條軌道上展開激烈競爭,爭奪用戶和數據。
此外,車聯網(V2X)技術的成熟,將可能成為下一輪自動駕駛性能飛躍的關鍵驅動力,透過讓車輛與車輛、車輛與路邊基礎設施進行即時通訊,V2X能夠為自動駕駛系統提供超越單車感知範圍的資訊,極大提升其在交叉路口、惡劣天氣等複雜場景下的安全性和效率,這項技術的部署需要政府和私營部門在智慧基礎設施方面進行大規模投資,目前已成為中國國家智能網聯汽車戰略的重要組成部分。
參考方向
基於以上分析,為不同市場參與者提出以下參考方向:
對汽車製造商(OEMs):
- 核心戰略:應集中資源在L2+級輔助駕駛領域建立領導地位,以此作為創造營收、積累數據和培養用戶信任的基礎。
- L3策略:對於L3功能的推出必須極度謹慎,前提是對其法律責任有清晰的認知,並設計出一個範圍極小、風險可控的ODD。
- 能力建設:必須將軟體開發和數據處理能力視為與傳統製造同等重要的核心競爭力,加大相關投入。
對技術供應商(如光達、AI晶片公司):
- 產品方向:應持續專注於降低成本、提升可靠性和簡化整合難度。
- 市場策略:與主流OEM廠商建立深度合作關係,力爭被整合進高銷量的車型平台中,是實現規模化商業成功的關鍵。
- 合規能力:必須具備應對不同國家和地區複雜的數據安全和網路安全法規的能力。
對政策制定者與監管機構:
- 國際合作:應盡可能地推動安全標準、測試協定和數據格式的國際協調與統一,以降低產業的全球化壁壘。
- 法律建設:加快制定針對L3及以上等級自動駕駛事故的、清晰且可預測的法律責任框架,為創新提供穩定的法律環境。
- 基礎設施投資:應將智慧交通基礎設施(如5G-V2X網路)的建設納入公共投資的優先領域,為下一代更安全的自動駕駛技術鋪平道路。
對投資者:
- 市場認知:必須清晰地認識到市場的分化趨勢,要區分對L4/L5 Robotaxi的長期、高風險投資,與對L2+/L3 ADAS產業鏈中短期、更具規模效應的收入機會。
- 評估標準:在評估一家自動駕駛相關企業時,其駕馭複雜監管環境的能力,應與其技術實力被置於同等重要的位置。
- 關注焦點:除了關注整車企業,也應關注在感測器、晶片、軟體和測試驗證等細分領域具備核心技術和市場優勢的供應商。
奧創系統 (Ultrontek)
奧創系統科技 (Ultrontek) 是一家專業的訊號應用系統整合服務公司,以成為市場頂尖的訊號模擬與測試工程系統商為目標;公司總部位於台灣新北市,專為技術密集型產業提供從概念到實現的全週期客製化解決方案,協助客戶應對最嚴苛的測試挑戰。
核心業務與價值主張
奧創系統科技的核心業務是提供高附加價值的工程整合服務,服務涵蓋初期諮詢、可行性研究、平台評估、新舊技術整合,乃至最終的系統優化,公司立基於五大合作優勢:豐富的專案實績、整合新技術的卓越能力、協助客戶規避投資風險與節省時間的寶貴經驗、採用業界標準並客製非標方案的彈性,以及賦能客戶自主維護的完整技術轉移。
主要應用領域
奧創系統科技的專業技術服務橫跨多個尖端領域,展現其深厚的技術底蘊與市場洞察力:
- 航太國防應用: 提供無人載具、訓練模擬器、衛星干擾防禦等關鍵系統。
- 半導體量測設備: 涵蓋探針平台、高溫壽命測試 (HTOL) 等方案。
- 運動模擬平台: 包含高精度六軸平台與產業訓練模擬器。
- 射頻 (RF) 測試儀器: 從訊號產生、分析到完整測試系統建置。
- 光電影像模擬: 提供紅外線目標投影器、黑體校正源等專業設備。
- 車用製造與衛星測試: 針對新興的車用雷達與低軌衛星產業提供測試方案。
- 客製化系統: 包含電波/電磁暗房建置與自動化軟體開發。
奧創系統科技不僅是設備供應商,更是能與客戶共同成長、持續創造雙贏的工程夥伴,以卓越的解決方案,驅動產業的創新力量。
參考資料
- 《SAE J3016 驾驶自动化分级》 更新版发布- 42 号车库
- Top 5 Self-Driving Car Companies in 2025 - Shapiro Law Team
- Cars with Autopilot in 2025
- 特斯拉自動駕駛開進中國!預告2025 年初登場只差政府點頭
- 自駕車|特斯拉目標2025推Robotaxi上路!但得先跨過監管這一關! | 優分析| LINE TODAY
- Understanding Liability in Accidents Involving Autonomous or Semi-Autonomous Vehicles
- Automated lane keeping systems | ALKS regulation | TÜV SÜD
- Autonomous Vehicle Insurance Claims: How Liability and Compensation Have Changed
- DRIVE PILOT Automated Driving - Mercedes-Benz USA
- 智驾汽车“人机共驾”模式下的侵权责任归责模式研究 - hanspub.org
- Explainer: when will we have driverless vehicles? - Just Auto
- UNECE R157: Specifications on assistance systems for automated driving - EFS Consulting
- Road Safety: China Tightens Regulations on Intelligent Driving - APCO Worldwide
- China's MIIT tightens regulations on autonomous driving features, banning key functions
- UNECE adopts new regulation for emergency lane keeping system and guidance on data storage for automated driving
- 自动驾驶汽车事故:责任归属、法律适用与“双层保险框架”的构建 - 中国法学网
- Automotive Grade LiDAR Scanner 2025-2033 Overview: Trends, Competitor Dynamics, and Opportunities
- Emerging Market Insights in Long-range Automotive LiDAR: 2025-2033 Overview
- 2025: MEMS Mirrors Will Fix Automotive LiDAR - Semiconductor Digest
- Aeva Introduces Atlas Ultra, Its Slimmest High-Resolution Long-Range 4D LiDAR Sensor at CES 2025
- Autonomous Vehicle Safety Systems in 2025: Smarter, Safer, Ready - MOTORWATT
- Automotive LiDAR 2025 - Yole Group - Follow the latest trend news ...
- Exploring the Unseen: A Survey of Multi-Sensor Fusion and the Role of Explainable AI (XAI) in Autonomous Vehicles - MDPI
- ARBE Robotics Blog post / Interesting piece on Sensor Fusion (4D Radar / Vision / LiDar ) : r/SelfDrivingCars - Reddit
- The Future of Autonomous Vehicles - Number Analytics
- Advancements and Limitations in Sensor Fusion for AI-Controlled Vehicles
- [2503.07656] DriveTransformer: Unified Transformer for Scalable End-to-End Autonomous Driving - arXiv
- arXiv:2505.16805v1 [cs.CV] 22 May 2025
- From Imitation to Exploration: End-to-end Autonomous Driving based on World Model - arXiv
- 美国彻底把中国自动驾驶关在了门外
- 美自駕車上路法規將鬆綁| 美國新聞| 國際 - 經濟日報
- Autonomous Vehicle Collision Reports - California DMV - CA.gov
- 自駕車|美國國家公路交通安全管理局:簡化自駕車法規審查程序 ...
- The State of Autonomous Driving in 2025 | AUTOCRYPT
- Questions and answers on the Commission unveiling the Action Plan to drive innovation, sustainability, and competitiveness in the automotive sector
- 政策综述关于智能网联汽车相关政策法规分析 - 中国汽车流通协会
- 智能网联汽车政策法规不断完善,推动行业发展
- 智能汽车创新发展战略
- 智能汽车创新发展战略
- China's MIIT tightens regulations on autonomous driving features, banning key functions
- China: MIIT requests comments on Guidelines for the Security of Automobile Data Export
- 《無人載具科技創新實驗條例》—完備智慧運輸 - 行政院
- 無人載具科技創新實驗條例 - 植根法律網
- 無人載具上路實證與挑戰| 電腦與通訊
- 修正「『無人載具科技創新實驗條例』可供創新實驗運用之無線電頻率與其地理範圍 - 數位發展部
- 無人載具科技創新實驗計畫-最新消息 - 經濟部
- Alphabet's Waymo picks up speed in US cities as Tesla robotaxi service expands
- Waymo - Wikipedia
- Self-driving cars are making progress. Here's where Tesla, Waymo, Uber and other robotaxi rivals stand - Safety21
- Scaling our fleet through U.S. manufacturing - Waymo
- Cruise (autonomous vehicle) - Wikipedia
- A Farewell from Cruise : r/SelfDrivingCars - Reddit
- GM to stop funding troubled Cruise autonomous vehicle unit, abandoning robotaxis
- GM | Zero Congestion with Self-driving Vehicles
- Clear attitude and technological progress (2024). | Mercedes-Benz Group
- Testing of level 4 automated driving in Beijing | Mercedes-Benz Group
- Explore Ford BlueCruise: Hands-Free Driving | Ford EV News
- Ford BlueCruise Coming To Three Additional Models
- Ford executive team admits no Level 3 autonomy by 2025 - Teslarati
- "Ford CEO Says Its Cars Will Have Hands-Free Autonomy in 2026" : r/SelfDrivingCars
- Determining Fault for an Accident Involving a Driverless Car - Roden Law
- Autonomous Vehicles and Personal Injury Law: Preparing for a New Era of Liability and Litigation | Spreeder
- When Robots Drive: Navigating Liability in Autonomous Vehicle Accidents - Mabra Law
- 浅析完全自动驾驶车辆交通事故的民事责任承担原则 - 锦天城律师事务所
- Autonomous Vehicle Accidents: Who Is Liable When a Self-driving Car Crashes?
- 自动驾驶汽车交通肇事的刑法归责 - 环球法律评论
- 郑玉双|自动驾驶的算法正义与法律责任体系
- 自動駕駛汽車如何因應道德問題 - 遠見雜誌
- 自動駕駛車輛的倫理、法律與社會影響. 導論| by 楊學智...
- 認識人工智慧技術下的自駕車—從道德到隱私問題