
自動駕駛的精準之眼:GNSS與IMU緊/深耦合演算法的挑戰與工程實踐
導論:自動駕駛對連續、高精度定位的極致需求
自動駕駛技術的飛速發展,正引領我們駛向一個更安全、更高效、更便捷的出行未來,從L2級的輔助駕駛到L5級的完全自主駕駛,每一個等級的提升都對車輛的環境感知、決策規劃以及定位定向能力提出了更高的要求。在這其中,連續、高精度、高可靠性的定位資訊,無疑是自動駕駛車輛安全行駛的「眼睛」和「羅盤」。
全球導航衛星系統(GNSS)以其全天候、全球覆蓋的特性,成為自動駕駛定位系統不可或缺的一環。然而,在複雜的真實駕駛環境中,尤其是在高樓林立的都市峽谷、隧道、樹蔭遮蔽路段,GNSS訊號容易受到多路徑效應、訊號遮擋、甚至惡意干擾的影響,導致定位精度下降、輸出中斷,無法滿足自動駕駛對PNT(定位、導航與授時)資訊的嚴苛需求。
為彌補GNSS的不足,慣性測量單元(Inertial Measurement Unit, IMU)以其獨特的優勢成為了理想的互補感測器,IMU由陀螺儀和加速度計組成,能夠以極高的更新率(通常數百Hz至kHz)自主提供載體的姿態、速度和位置變化量,具有良好的短期定位精度和抗干擾能力,能夠在GNSS訊號失效時進行航位推算(Dead Reckoning);然而,IMU的誤差會隨時間累積,導致長期定位結果漂移;因此,如何將GNSS的長期絕對定位精度與IMU的短期相對定位精度及高更新率有機結合,實現優勢互補,成為自動駕駛高精度定位技術的核心課題,而緊耦合與深耦合演算法正是解決這一問題的關鍵技術路徑。
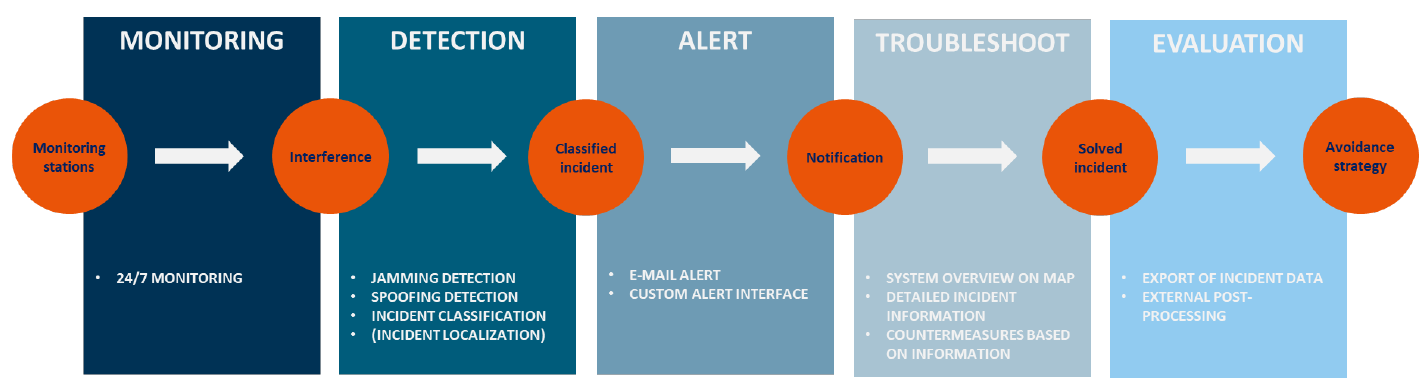
自動駕駛車輛在真實環境中,其賴以定位的GNSS訊號可能遭受干擾(Interference)或欺騙(Spoofing)攻擊,這使得基於GNSS與IMU的感測器融合及強韌性設計至關重要。
GNSS+IMU整合的三重境界:從鬆耦合到深耦合
GNSS與IMU的整合,根據兩者數據融合的層次與緊密程度,通常可以劃分為鬆耦合(Loose Coupling)、緊耦合(Tight Coupling)和深耦合(Deep Coupling / Ultra-Tight Coupling)三個主要級別。
鬆耦合 (Loose Coupling)
- 原理: GNSS接收機和IMU各自獨立解算,輸出位置、速度等資訊,再由中央融合濾波器(通常是卡爾曼濾波器)進行加權融合。
- 優點: 演算法相對簡單,模組化程度高。
- 缺點: 資訊損失較多;GNSS衛星數少於4顆或輸出品質差時,融合系統無法從GNSS獲得校正,完全依賴IMU推算,誤差迅速累積。
緊耦合 (Tight Coupling)
- 原理: 直接使用GNSS的偽距/偽距率、載波相位/都卜勒等原始觀測量,與IMU預測的觀測量進行比較,差值(新息)送入中央卡爾曼濾波器,統一估計PNT狀態及IMU感測器誤差。
- 優點: 即使GNSS衛星數少於4顆(但至少1顆有效),仍能利用有限資訊校正IMU,提升弱訊號下的定位能力;更易於故障檢測與排除(FDE);IMU誤差估計更精確。
- 挑戰: 演算法複雜度高於鬆耦合,需更緊密的系統整合,對GNSS接收機輸出原始數據有要求。
深耦合 (Deep Coupling / Ultra-Tight Coupling)
- 原理: IMU資訊直接輔助GNSS接收機最底層的訊號擷取和追蹤環路(PLL/DLL)。IMU預測的都卜勒和碼相位可縮小搜尋範圍,提升追蹤靈敏度和抗干擾能力。融合甚至可在I/Q相關值層面操作。
- 優點: 在極微弱訊號、極高動態或極強干擾環境下性能最優;顯著提升抗干擾能力。
- 挑戰: 演算法最複雜;需GNSS接收機底層開放介面(通常需SDR或專用ASIC);對處理能力和即時性要求嚴苛。
緊/深耦合演算法的關鍵技術與工程挑戰
實現高性能、高可靠性的GNSS+IMU緊/深耦合定位系統,研發工程師需攻克一系列關鍵技術難題:
- 精密的IMU誤差建模與校準: 必須對IMU主要誤差源(偏置、比例因子、非對準、隨機遊走等)進行精確數學建模,並在卡爾曼濾波器中估計與補償。
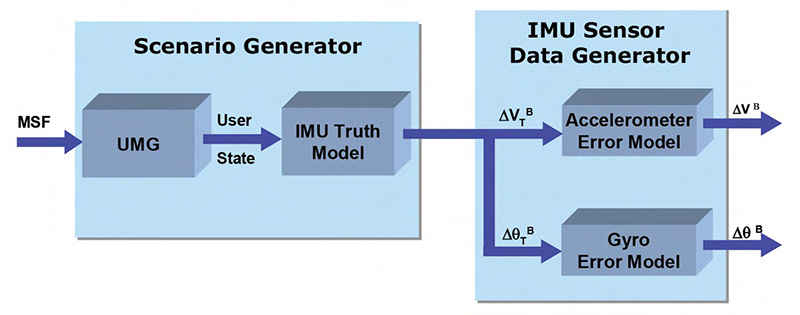
高擬真IMU模擬是GNSS+IMU耦合測試的關鍵環節,場景產生器提供真實運動狀態(User State),經過IMU真值模型(IMU Truth Model)後,再疊加加速度計誤差模型(Accelerometer Error Model)與陀螺儀誤差模型(Gyro Error Model),最終生成帶有真實感測器特性的IMU數據(DeltaV_TB,Deltatheta_TB),用於驅動或驗證融合演算法。
- 時間同步的嚴苛性: GNSS觀測量與IMU高速採樣數據間需實現微秒級甚至更高精度的時間戳對齊。
- 卡爾曼濾波器的設計與調優: 包括狀態向量選擇、系統/觀測模型建立、以及關鍵的系統雜訊協方差矩陣Q和觀測雜訊協方差矩陣R的準確設定與調優。
- 非完整性约束 (NHC) 與零速更新 (ZUPT) 的利用: (適用於地面車輛)
- 多路徑與非視距 (NLOS) 訊號的應對: 在耦合濾波器中對受污染的GNSS觀測量進行降權或剔除。
工程驗證的關鍵:GNSS+IMU耦合系統的模擬與測試
對於自動駕駛研發工程師而言,全面驗證緊/深耦合演算法在各種複雜場景下的性能至關重要。這需要一個能夠精確模擬GNSS訊號特性,並能與IMU動態行為同步的測試環境。
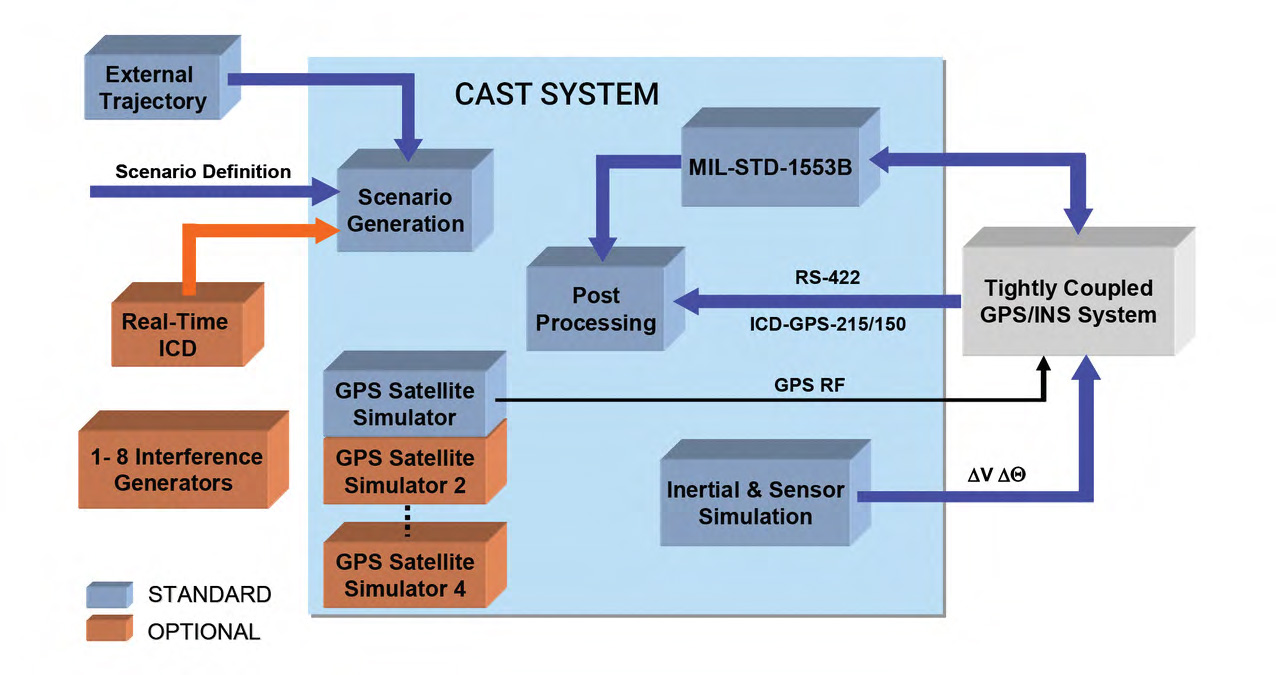
典型的GNSS+INS緊耦合系統硬體迴路(HIL)測試平台架構示意圖,其中GNSS衛星訊號模擬器與慣性及其他感測器模擬(Inertial & Sensor Simulation)協同工作,為待測的緊耦合GPS/INS系統提供全面的測試輸入,甚至可以整合干擾產生器(Interference Generators)以評估抗干擾性能。
專為GNSS與慣性導航系統(INS)整合測試設計的平台,例如 GNSS-INS即時模擬平台,便致力於解決這一挑戰。這類平台通常結合高傳真GNSS訊號模擬與運動模擬能力,GNSS訊號的模擬部分,可以由如OHB XPLORA Pro或OHB XPLORA One等模擬器承擔;XPLORA Pro以其高通道數和即時模擬能力,特別適合模擬複雜的多星座GNSS環境,並可與外部運動模擬器(如六軸運動平台 (Hexapods),根據負載需求可選擇 250kg以下 或 250kg以上 的機型)進行同步,實現對GNSS+IMU系統的硬體迴路(HIL)測試;其可選配的干擾/欺騙訊號生成功能,則能驗證耦合系統在GNSS受攻擊時的強韌性與故障弱化行為。

OHB XPLORA Pro GNSS模擬器,其高達50Hz的模擬更新率和對多種民用GNSS星座(GPS, Galileo, GLONASS, BeiDou等)及其主要頻段的支援,使其能精確模擬車輛在高動態行駛過程中的GNSS訊號變化,為緊/深耦合演算法的HIL測試提供可靠的訊號源。
而XPLORA One則以其高性價比和便攜性,支援多星座真實環境模擬(包括大氣延遲、多路徑、天線方向圖等),適合進行演算法的初步驗證和整合測試,其內建的高精度GPSDO參考時鐘(與UTC時間偏差±50 ns RMS) 對於驗證GNSS與IMU數據的時間同步精度至關重要。

OHB XPLORA One 以其輕巧便攜的設計(1RF輸出版本重量僅1.2kg)和對Windows/Linux作業系統的廣泛支援,可方便地與研發工程師的COTS筆記型電腦配合使用,快速搭建GNSS+IMU演算法的初步驗證環境。
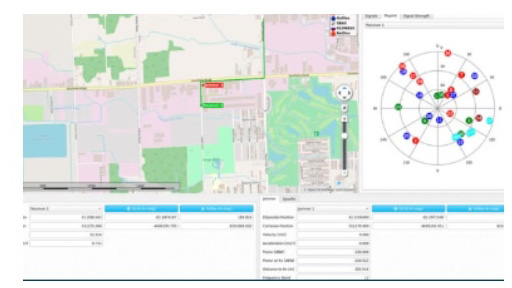
OHB XPLORA One的XPLORA Core軟體操作介面示意,工程師可透過地圖定義車輛行駛軌跡(左側面板),並即時監控模擬的衛星星空圖(右上角Skyplot,顯示不同星座衛星)及接收機狀態(下方Position/Velocity/Time等資訊),以進行GNSS+IMU耦合演算法的開發與驗證。
對於需要精確參考軌跡以評估耦合定位精度的場景,sPositioner400 精密單點定位系統可以提供公分級的定位結果作為基準。更進階的測試可能還需要考慮通道效應,如使用ACE9600 先進通道模擬器來模擬複雜的城市或室內訊號傳播環境。
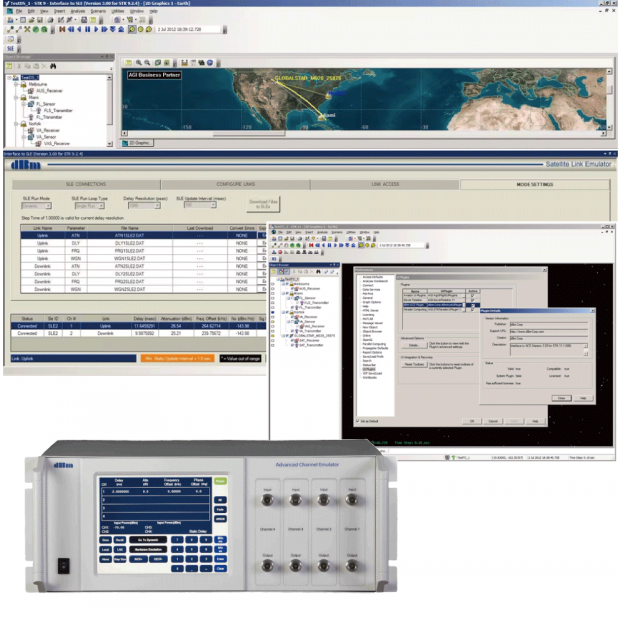
為更精確模擬GNSS訊號在複雜環境(如都市峽谷、室內)中的傳播特性(多路徑、衰減、相位變化等),可採用如DBM ACE9600 先進通道模擬器(硬體如圖下方所示,軟體介面如圖上方所示)等專業設備,對GNSS模擬器輸出的RF訊號進行處理後再送入待測系統。
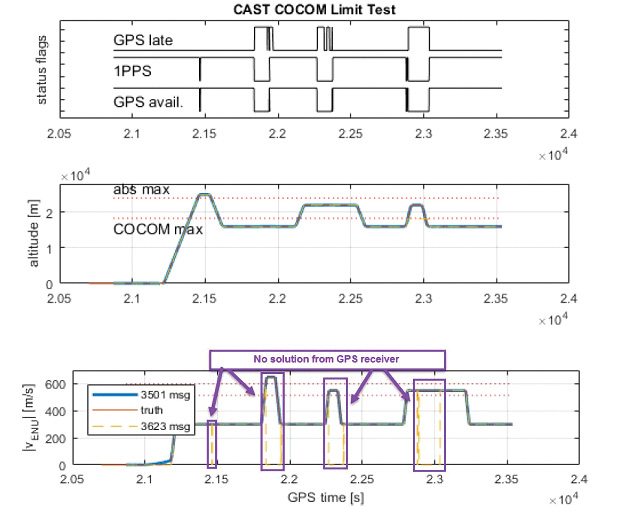
GNSS接收機在動態或COCOM(美國出口管制條例)限制條件下的性能測試結果範例,圖中顯示了狀態旗標(如GPS late、1PPS可用性)、高度及速度的變化,在GPS接收機無解算輸出的時段(紫色框標示),緊/深耦合的IMU能發揮航位推算作用,維持定位連續性,這類測試對於驗證GNSS+IMU系統在GNSS訊號間歇中斷時的強韌性至關重要。
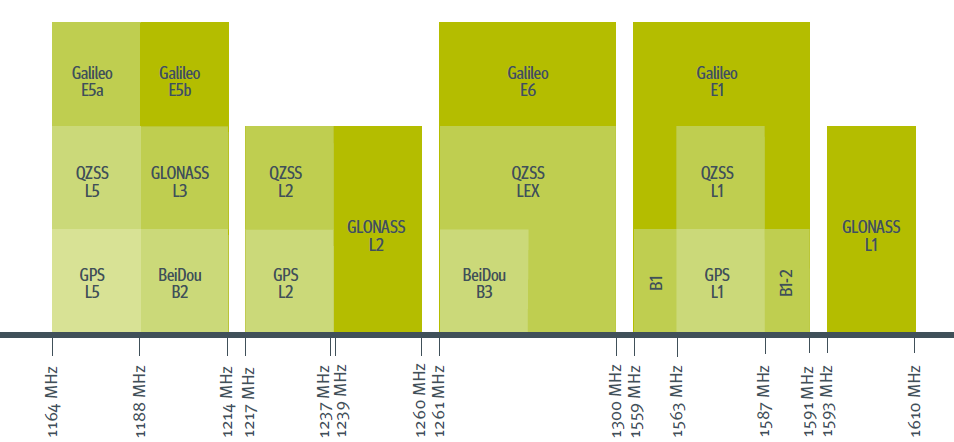
GNSS+IMU耦合系統中的GNSS部分需處理來自多個星座、多個頻段的複雜訊號(如圖所示的GPS L1/L2/L5, GLONASS L1/L2/L3, Galileo E1/E5a/E5b/E6, BeiDou B1/B2/B3等)。模擬器需要能準確再現這些訊號特性,而耦合演算法也需能有效融合這些多樣化的觀測數據。
不同耦合等級的性能比較與應用考量
|
特性比較 |
鬆耦合 |
緊耦合 |
深耦合 |
|
融合層級 |
位置/速度域 |
原始觀測量層級(偽距、載波相位等) |
訊號追蹤環路/I&Q相關值層級 |
|
GNSS最少衛星需求 |
通常4顆 |
1至3顆仍可輔助 |
1顆星的微弱訊號亦可能追蹤 |
|
弱訊號/遮蔽環境性能 |
差 |
較好 |
最佳 |
|
抗干擾/欺騙能力 |
弱 |
中等 |
強 |
|
演算法複雜度 |
低 |
中 |
高 |
|
系統整合要求 |
低 |
中 |
高(需開放GNSS接收機底層介面) |
|
典型應用 |
消費級導航、早期ADAS |
中高階ADAS、無人機 |
極端挑戰環境、軍用、未來高階自駕 |
未來趨勢:AI、LEO PNT與感測器深度融合的展望
GNSS+IMU耦合技術仍在不斷發展,未來幾個趨勢值得關注:
- AI/機器學習的應用:
利用AI/ML技術優化卡爾曼濾波器的雜訊參數自適應調整、更智慧地識別和處理多路徑/NLOS訊號、甚至直接進行PNT狀態估計。 - LEO PNT星座的融入:
新興的低軌道(LEO)PNT星座將為GNSS+IMU融合帶來新的機遇與挑戰。 - 與視覺、光學雷達等更多感測器的超緊密融合(X-in-the-loop):
實現全場景、全天候的無縫高精度定位。 - 車規級高性能MEMS IMU的進步:
進一步提升GNSS+IMU耦合系統的性價比和普及度。
緊/深耦合 – 賦能全場景自動駕駛的定位基石
對於追求在各種複雜駕駛環境下都能實現連續、高精度、高可靠定位的自動駕駛系統而言,GNSS與IMU的緊耦合乃至深耦合技術,無疑是不可或缺的定位基石。相較於鬆耦合,它們能夠更充分地利用來自GNSS的原始資訊,更有效地抑制IMU的誤差累積,在GNSS訊號部分遮擋或品質下降時展現出更強的韌性。雖然其演算法複雜度和系統整合難度更高,但隨著車規級處理器算力的提升和感測器技術的進步,緊/深耦合方案的應用前景日益廣闊。
對於致力於此領域的研發工程師而言,深刻理解不同耦合方式的原理與特性,掌握關鍵的誤差建模、時間同步、濾波器設計與調優技術,並輔以如OHB XPLORA系列GNSS模擬器、GNSS-INS即時模擬平台及六軸運動平台 (Hexapods)等先進的模擬與測試工具進行全面、嚴苛的工程驗證,將是成功開發出滿足自動駕駛嚴苛要求的PNT解決方案的關鍵。這是一條充滿挑戰但也極具價值的技術探索之路,其成果必將為未來智慧出行舖平道路。
想了解OHB XPLORA Pro或XPLORA One如何以其焦點規格(如高精度時鐘、多樣化場景模擬、干擾注入等)助力您的GNSS+IMU融合定位系統研發與測試?或是對我們的GNSS-INS即時模擬平台及六軸運動平台 (Hexapods) 感興趣?立即聯繫OHB技術專家,獲取專業的解決方案與產品演示。
探索更多關於OHB所有產品在自動駕駛及高精度PNT領域的應用。