
超高解析度斷層掃描中的樣品操作精密運動控制
提升次奈米級成像表現的關鍵考量
在持續演進的超高解析度斷層掃描領域中,X 光扮演著關鍵角色,其運用於產生次 100 奈米(nm)等級的非破壞性、高解析度影像,為了精準地定位與操作斷層掃描實驗中的各項元件,例如:正在成像的樣品、X 光束以及偵測器或相機,精密運動設備(如線性與旋轉平台)不可或缺。
隨著 X 光束截面日益縮小,且偵測器解析度不斷提升至奈米級別,運動設備的定位性能必須超越期望的解析度與量測準確度;本文將深入探討典型同步輻射光束線實驗站所使用的運動元件,並詳述設計師與工程師在追求可靠的超高解析度斷層掃描結果時,必須考量的關鍵項目。
同步輻射光束線實驗站的組成與光束處理
在同步輻射設施中,X 光從同步輻射儲存環射出後,即進入光束線,一般而言,光束線主要由三個區域組成:光束處理區(亦稱光學艙),負責對光束進行調校;實驗站(或稱實驗艙),進行實際實驗操作;以及控制區/機艙,集中設置所有儀器與控制系統。
在光束處理區中,X 光束會被精確地處理成所需的大小、形狀與波長,此區域所使用的裝置包括:快門、濾波器、狹縫、衰減器、準直儀、單色器以及聚焦鏡,儘管這些裝置的運動設備對於高解析度、重複性、準確度與穩定性有嚴格要求,但其設計與選擇的詳細內容將不在此篇文章的討論範圍內。
光束線實驗站樣品定位配置概述
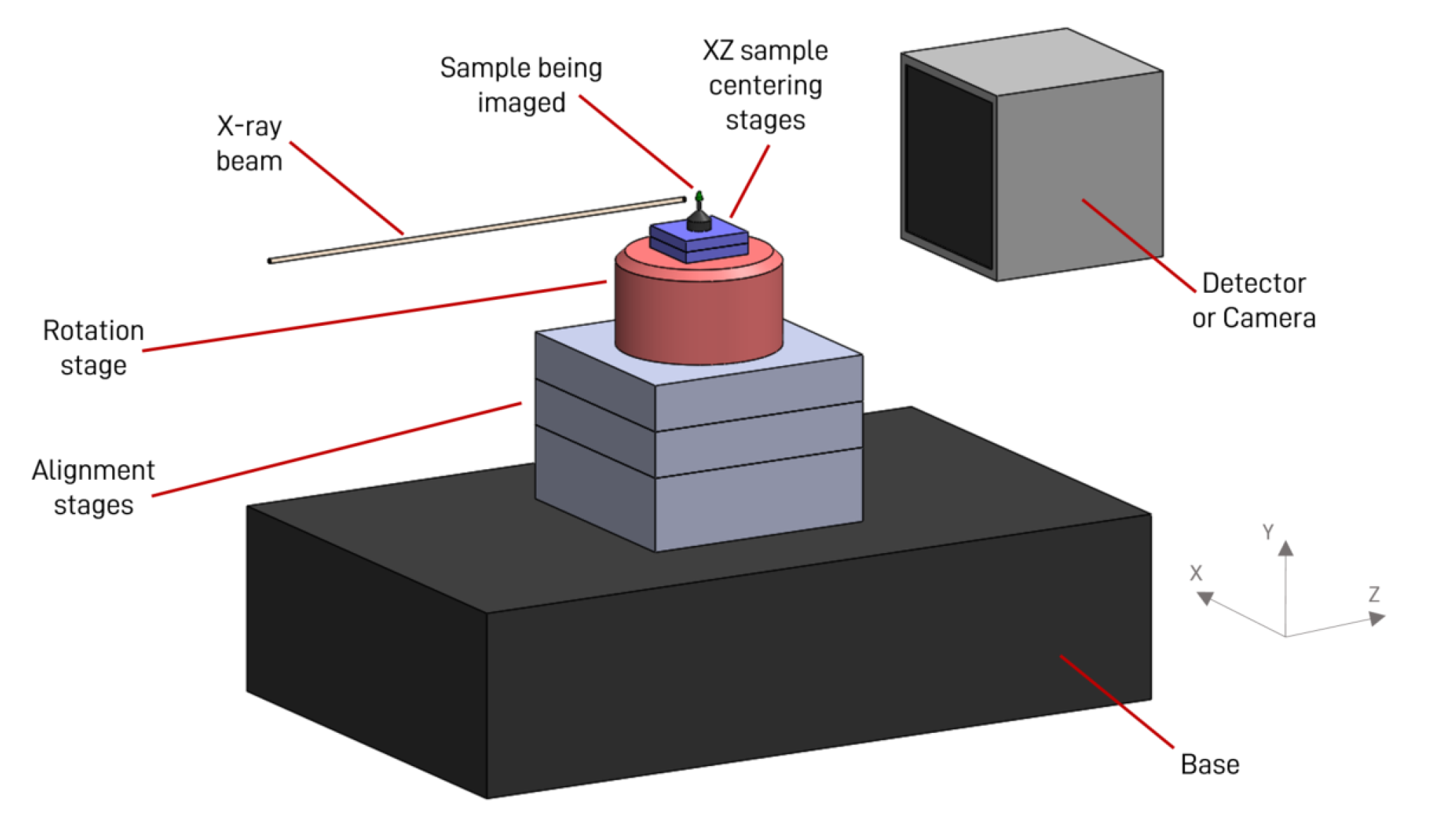
圖 1 呈現了典型光束線實驗站的樣品定位配置示意圖。
在此配置中,X 光由同步輻射設施產生並從儲存環射出進入光束線,因此光束相對於實驗位置通常是固定的,在實驗期間,偵測器也保持靜止狀態;對準平台的作用是將樣品精確地對準 X 光束與偵測器,根據實驗類型的不同,這些平台可具備三至六個運動軸,在大多數斷層掃描實驗中,對準平台會執行初始對準,隨後在整個成像過程中必須保持靜止不動。
旋轉平台與樣品對中機制詳解
旋轉平台通常設置於對準平台上方,其主要功能是旋轉待成像的樣品。當旋轉平台在不同角度位置移動時,偵測器會同步建立二維影像。隨後,這些二維影像會透過軟體進行整合,以建構出樣品的完整三維影像。
為了將樣品精確地對中並對準旋轉軸,旋轉平台上方通常會設置額外的平台,此類對準通常涉及 X、Z 軸的運動,有時也包含傾斜/擺動(tip/tilt)的調整,一旦樣品成功對準旋轉軸,這些平台在整個成像過程中便會保持靜止,以確保影像的穩定性與準確性。
對準平台的關鍵性能要求與設計考量
對準平台的核心功能是執行樣品相對於 X 光束與偵測器的初始對準,為此,機械解析度通常達到數百奈米或個位數微米已足以滿足需求;然而,一旦完成對準,這些平台在整個實驗過程中必須將其位置維持在極高的穩定度(約個位數奈米),以確保量測的精確性。
正如論文《光束線定位中的最小增量運動與保持穩定性》所闡述的,直驅式與螺桿驅動式伺服及步進馬達平台能夠實現奈米級的在位抖動(in-position jitter)與保持穩定性,然而,必須謹慎管理馬達運作時產生的熱量,以避免在較長時間(分鐘級別)內對性能產生不利影響;即使步進馬達的保持電流在軸對準後可降至零,但在對準運動期間使用的高電流可能導致實驗過程中出現熱漂移;相較之下,配備現代數位放大器的線性與旋轉伺服馬達在短期(數秒)和長期(數分鐘或數小時)穩定性方面通常表現最佳。
除了平台的保持穩定性,高機械靜態與動態剛度對於實現奈米級成像性能同樣至關重要。因此,實施良好的設計原則是必要的,這包括:
- 最小化運動平台的堆疊高度,減少累積誤差。
- 在堆疊底部選用尺寸較大且剛度更高的平台,以提供穩固基礎。
- 盡可能減輕平台重量與高度,降低慣性與結構形變。
- 採用平行運動學設計,可有效提升系統剛性與穩定性。
圖 2 顯示了用於光束線應用中樣品操作的 6 軸混合平行與串聯結構範例,其中,三個對準運動為 Y 軸、Z 軸以及繞 Z 軸的旋轉(橫搖);值得注意的是,橫搖運動可透過差動控制 Y1 與 Y2 兩種方式實現,若對 Y1 與 Y2 進行同步指令運動,將促使樣品在 Y 方向上移動,此設計方法不僅實現了小型化結構,更帶來了高剛度的優勢。
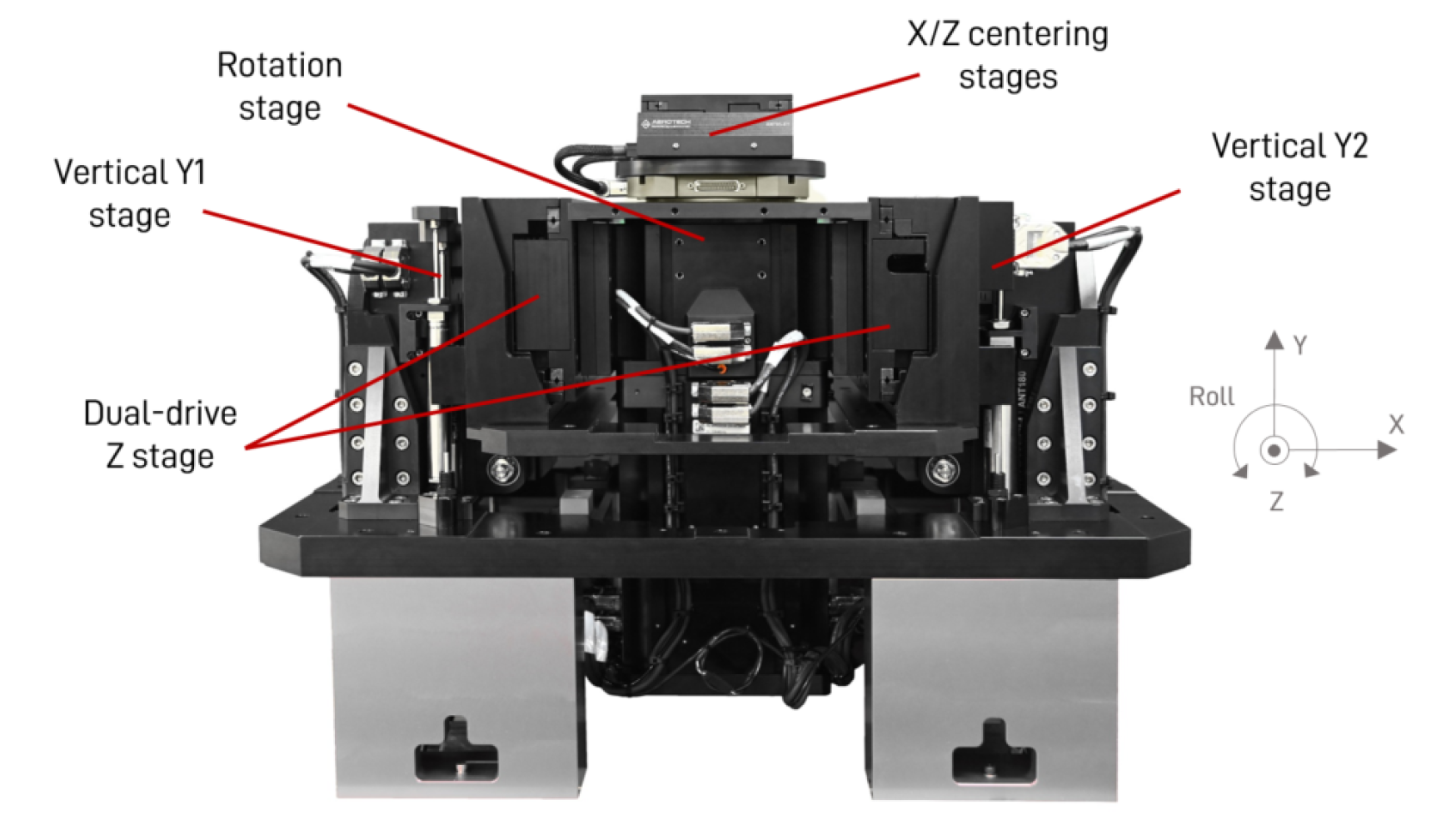
圖 2. 用於光束線樣品操作的 6 軸混合平行與串聯運動學結構。
另一種選擇是採用六軸平台(hexapod)作為對準軸,這種方法的優勢在於,它能在小型化系統封裝中實現所有六個自由度的對準運動;然而,其行程通常會限制在數十毫米的線性運動與數十度的旋轉運動範圍內,圖 3 顯示了一個六軸平台,其頂部配置了旋轉平台。
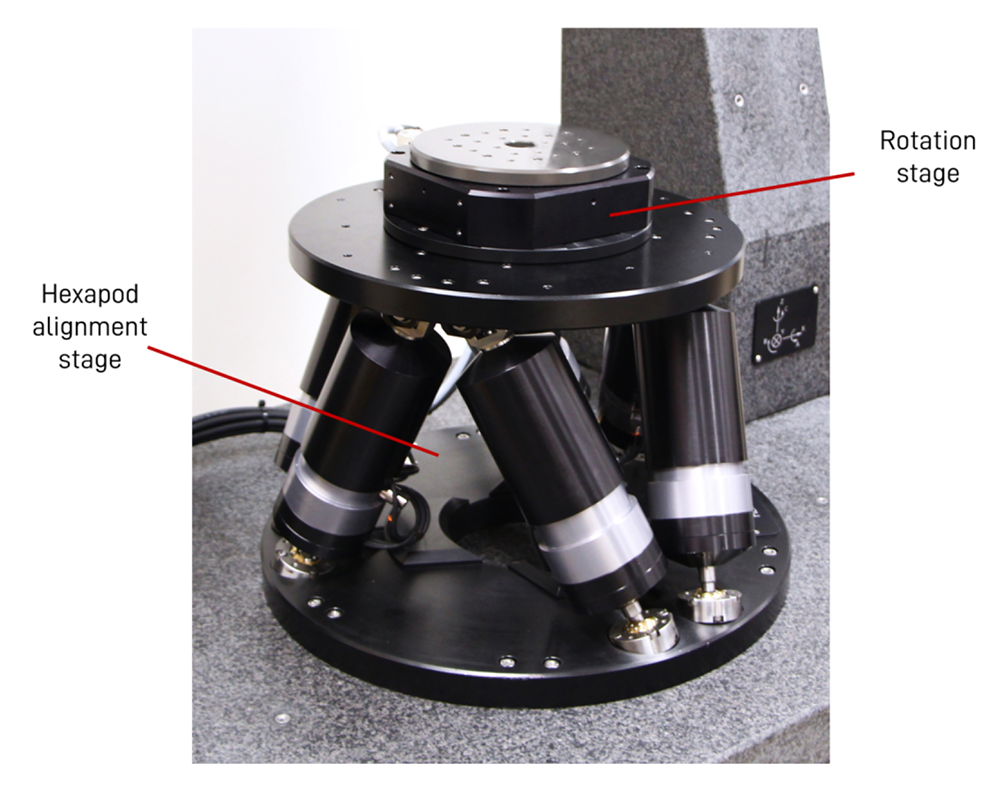
圖 3. Aerotech 的 HEX500 六軸平台與安裝在其移動平台上的精密旋轉平台。
旋轉平台性能要求與誤差運動評估
在奈米斷層掃描應用中,旋轉平台具備優異的誤差運動性能對於獲得高影像品質至關重要,大多數情況下,旋轉平台會採用空氣軸承設計,此設計可有效減少同步誤差運動(每次旋轉重複出現的誤差運動)與非同步誤差運動(每次旋轉不重複出現的誤差運動)。
為了精確量測旋轉平台的誤差運動,會將一個圓度小於 5 奈米的精密切削球形工件安裝在旋轉平台上,當平台連續旋轉多圈時,高解析度電容式感測器會持續對準該工件進行量測,收集到的資料經後處理後,即可精確判斷旋轉平台的徑向與軸向誤差運動性能。
圖 4 呈現了在 Aerotech ABRX250 平台上,以 60 rpm 轉速,在桌面上方 65 毫米(mm)高度處量測到的軸向與徑向誤差運動數據,諸如 ABRX 系列等高品質空氣軸承旋轉平台,能夠實現小於 25 奈米的誤差運動,這使其成為超高解析度斷層掃描實驗的常用選擇。
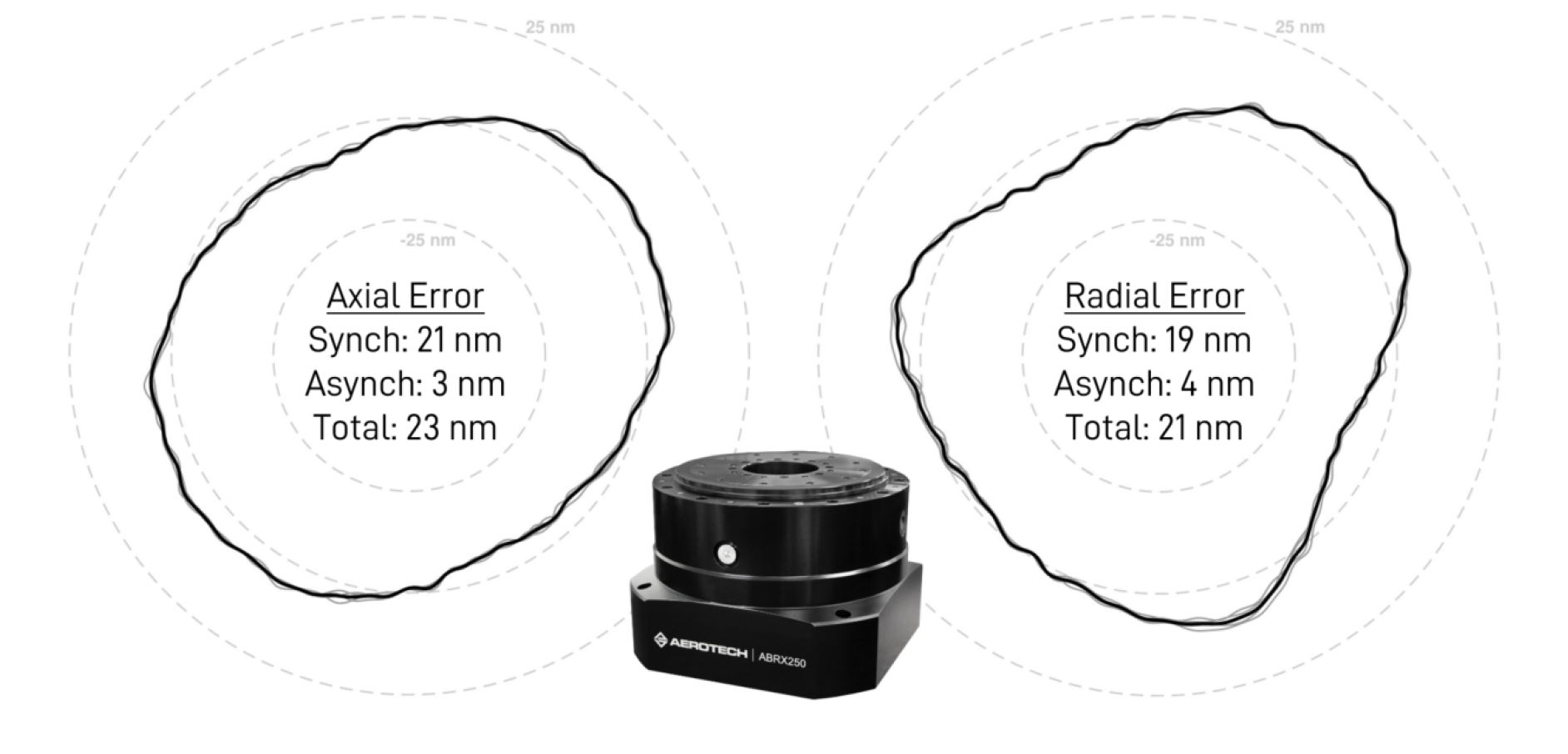
圖 4. 在 ABRX250 旋轉空氣軸承平台於桌面上方 65 毫米高度處、60 rpm 轉速下量測到的軸向與徑向誤差運動圖。
如前所述,旋轉平台通常會承載對中與對準平台,以便將樣品精確對準旋轉軸,由於需要連續旋轉,對中平台的馬達電源與回饋訊號通常會透過位於旋轉平台內部的滑環進行傳輸,旋轉平台設計與滑環介面必須經過特別優化,以最大程度地減少可能導致誤差運動增加的徑向力。
在斷層掃描應用中,由於需要在樣品處容納其他儀器設備與製程控制機制(例如低溫冷卻),使得量測點距離旋轉平台桌面 100 毫米或更遠的情況相當普遍,儘管這些較大的距離對於設備整合是必要的,但它們可能會因旋轉平台的傾斜誤差運動而對誤差運動(或模糊球容差)產生不利影響,進而影響整體量測精準度。
最後,為了提升超高解析度斷層掃描實驗的實驗通量,較高的旋轉速度扮演著不可或缺的關鍵角色。
表 1 顯示了在配備滑環的客製化 ABRX250 旋轉平台,於不同轉速與桌面上方不同高度下的誤差運動測試結果,充分展現了其卓越性能。
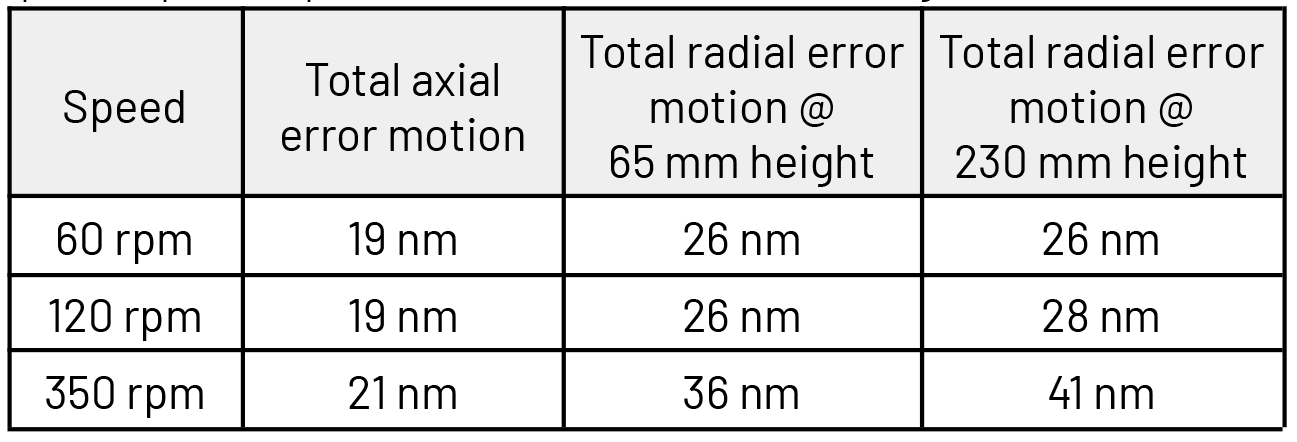
表 1. 配備滑環的 ABRX250 旋轉平台在 60 rpm、120 rpm、350 rpm 轉速以及兩種不同量測高度(65 mm 與 230 mm)下的總軸向與徑向誤差運動結果。
表 1 中的結果清晰展示了設計精良的超高解析度斷層掃描旋轉平台所具備的極低誤差運動能力,在此特定範例中,即使在旋轉平台桌面上方 230 毫米的高度處,仍能實現小於 50 奈米的模糊球,值得注意的是,若能將斷層掃描的量測高度降低,將可進一步縮小模糊球,進而大幅提升量測的精準度。
對中與對準平台的嚴格要求:確保樣品精確到位
對中與對準平台的核心功能是將樣品精確地對準旋轉平台的旋轉軸,這些平台必須具備小於 50 奈米的最小增量運動能力,以確保微觀定位的精準性,一旦樣品對中並對準完成,平台在旋轉過程中必須將其位置維持在數奈米範圍內,因為任何微小的移動都可能導致成像誤差;最後,將整體高度保持在最小,能夠使樣品盡可能地靠近旋轉平台桌面,這對於影像品質的提升至關重要,其原因已如前述。
結構設計:影像品質的根本保障
在光束線斷層掃描實驗中,結構路徑或結構迴路通常會相當長,值得注意的是,光束、樣品與偵測器之間發生的任何不必要的相對運動,最終都會直接反映為影像誤差,為將這種相對運動降至最低,以下設計實踐至關重要:
- 最小化運動平台的堆疊高度,以有效減少累積誤差與結構不穩定性。
- 盡可能縮短整體設計路徑長度,降低系統對振動與熱變形的敏感度。
- 為偵測器、樣品與其他儀器設計高剛度夾具,確保其在操作過程中的穩定性。
- 盡可能最小化並/或隔離振動,避免外部干擾影響成像品質。
- 選用具備高靜態與動態剛度的高品質運動設備,從根本上提升系統的穩定表現。
資料擷取與控制:實現高效能同步成像
由於旋轉平台必須連續高速旋轉,因此具備一個能夠在連續掃描同時同步影像資料收集的運動控制系統顯得至關重要;理想情況下,這些觸發事件應基於旋轉平台或其他運動軸的位置回饋產生,且具備低延遲性,以便於後處理中的影像重建,諸如 Aerotech 的位置同步輸出(Position Synchronized Output)等工具,即能高效實現此類資料收集,同時維持高影像保真度。
總結:系統級設計推動超高解析度成像進程
在超高解析度斷層掃描應用中,樣品操作的精密運動控制對於獲得優異的成像結果至關重要,除了選擇高品質的運動控制元件外,諸如良好的結構設計與高速、同步資料擷取等面向也同樣不可或缺,透過對所有元件(包含精密運動系統)採取系統級設計方法,將更能輕易地實現實驗成功,推動科學研究的進程。
更多精密運動解決方案
除了本文討論的技術,我們也提供一系列用於滿足高精度運動控制需求的產品,包含:
- 史都華六軸平台(Hexapods):提供六個自由度的精密運動控制,適用於需要高靈活性與高剛度的應用。
→ 前往了解更多:史都華六軸平台 - 平衡環轉台(Gimbals):專為精確角度定位和穩定性設計,常用於光學、感測器和雷達系統。
→ 前往了解更多:平衡環轉台 - 特定製程運動控制(Process-specific Motion Control):針對特定工業製程優化的運動控制解決方案,確保最佳性能與效率。
→ 前往了解更多:特定製程運動控制 - 運動控制龍門(Gantries Products):高剛性、高負載能力的龍門系統,適用於大型工件的精密定位與搬運。
→ 前往了解更多:運動控制龍門 - 客製化運動平台(Custom Motion System):依據客戶獨特需求量身打造的運動控制系統,滿足最嚴苛的技術挑戰。
→ 前往了解更多:客製化運動平台
關於作者

Brian O’Connor 擔任 Aerotech 行銷副總裁一職,負責全球業務發展、產品管理與行銷傳播事務。他在 Aerotech 服務近 20 年,期間曾擔任多個技術與業務領導職位,並擁有三項用於 Aerotech 產品設計的專利。Brian 同時也是美國精密工程學會(ASPE,American Society for Precision Engineering)的活躍成員,於 2019 年至 2021 年期間擔任執行委員會成員,並於 2020 年擔任會長。

Chris Charlesworth 是 Aerotech 的歐洲控制系統專家,主要負責管理控制系統業務,並為控制元件提供應用支援。Chris 過去曾從事多種自動化相關職位,其中包括在英國同步輻射設施工作 4.5 年,期間他負責光束線控制系統的設計與實施,特別專注於運用斷層掃描與繞射技術的光束線。

Darrell Paul 是 Aerotech 的業務發展經理,在自動化與運動控制領域擁有超過 20 年的豐富專業知識。在 Aerotech,他專注於關鍵的精密自動化產業,例如半導體、測試與檢測、光學與光子學、航空航天與先進科學等領域。