
鏈路韌性:解構 6+2 軸動態模擬在低軌衛星通訊與自駕車聯網中的全域驗證革命
當「移動」成為通訊與導航的最大變數
在萬物聯網(IoE)與低軌衛星(LEO)通訊爆發的年代,我們正目睹一場關於「連結」的物理學挑戰,過去通訊基站是固定的,車輛的導航容許公尺級誤差;然而,隨著自動駕駛 Level 4/5 的推進以及星鏈(Starlink)、Oneweb 等非靜止軌道衛星(NGSO)成為軍民兩用的通訊骨幹,系統運作的場景已從靜止轉變為極端動態。
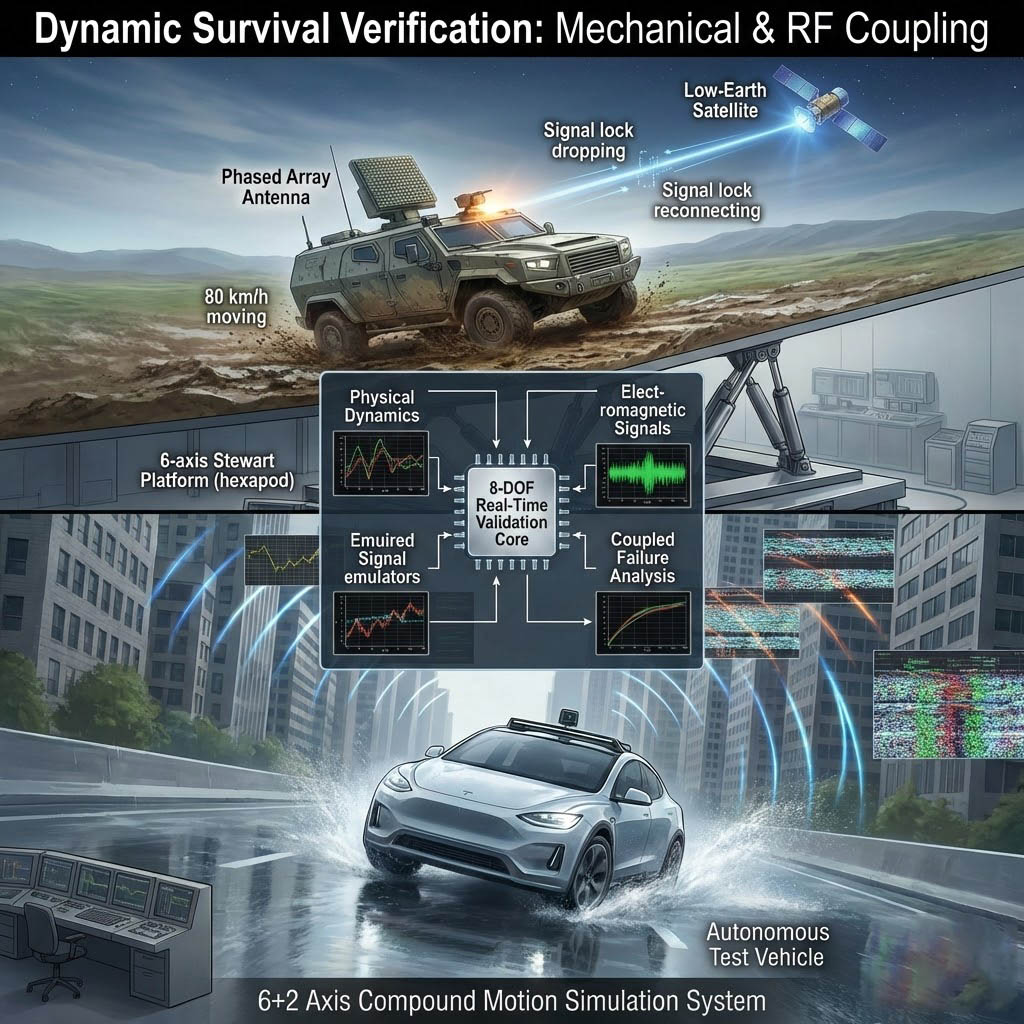
想像一輛裝甲指揮車在崎嶇的非鋪裝路面以時速 80 公里行駛,同時試圖透過相控陣列天線鎖定一顆以時速 27,000 公里飛越天頂的低軌衛星;或者一輛自駕車在暴雨積水的路面發生「水漂效應」(Hydroplaning),車身橫移的同時,GPS 訊號因高樓遮蔽而產生多路徑干擾。在這些場景中,物理運動(Mechanical Dynamics) 與 電磁訊號(Electromagnetic Signals) 的劇烈變化是同時發生的。
傳統的測試方法將兩者割裂:在震動台上測試天線結構,在暗室中測試訊號收發,這種「分治法」無法重現兩者耦合時的災難性失效——例如,車體震動導致天線伺服馬達頻寬飽和,進而跟丟衛星訊號,為了填補這一驗證缺口,工程界正導入一種具備 8 自由度(8-DOF) 的高階驗證架構:「6+2 軸複合運動模擬系統」,本文將探討此系統如何結合即時通道模擬(Channel Emulation),為下一代移動通訊(SATCOM-on-the-Move, SOTM)與自駕導航提供終極的「動態生存率」驗證。
系統工程核心:重新定義物理模擬的邊界
要模擬真實世界的複雜運動,單一的運動機構往往捉襟見肘,標準的六軸史都華平台(Stewart Platform)雖然擅長模擬高頻振動與姿態,但其水平位移範圍極小(通常 < 400mm);而長行程滑軌雖然位移大,卻無法產生複雜的傾角,「6+2」架構的工程哲學在於「頻率與空間的解耦」(Decoupling of Frequency and Space),透過兩層異質機構的串聯,創造出實驗室內的虛擬戰場或虛擬道路。
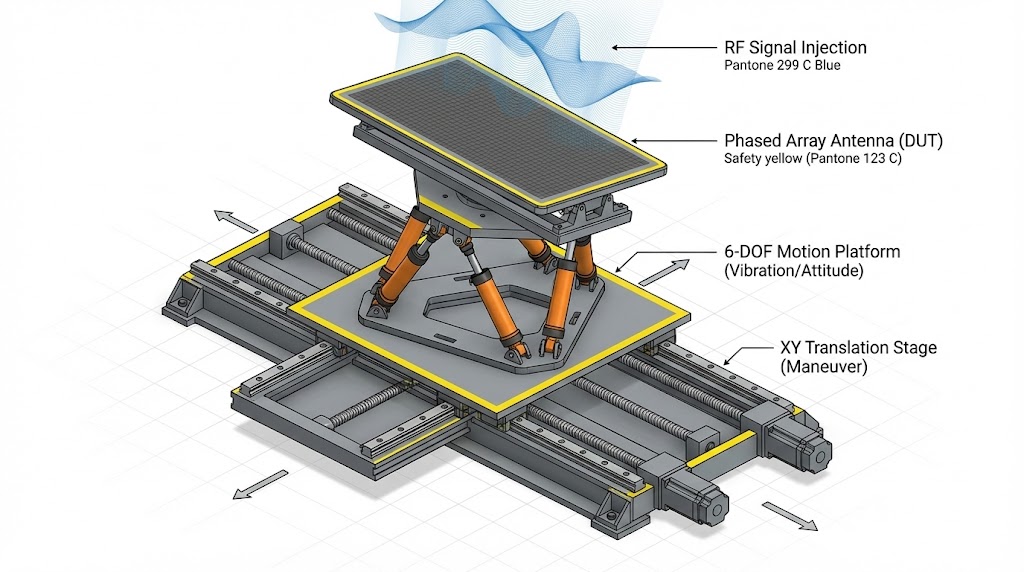
底層:XY 平移平台 (The Excursion Layer) —— 模擬軌跡與 G 力
位於系統基座的是行程可達 ±1 公尺(總行程 2 公尺)的高剛性 XY 平移台,這層結構打破了傳統模擬器的空間限制。
- 持續性加速度模擬:
當車輛高速過彎或閃避障礙物時,會產生持續數秒的側向 G 力,XY 平台透過長距離的加速位移,能物理性地重現這種離心力感受。 - 低頻大位移:
模擬船艦在湧浪中的大幅度橫移(Sway)或車輛在泥濘路面的側滑(Skid),這對於驗證自駕車的「防滑控制系統」或衛星天線的「粗追蹤」(Coarse Tracking)馬達至關重要。
上層:六軸史都華平台 (The High-Frequency Layer) —— 模擬姿態與紋理
疊加於 XY 平台之上的是高頻響應的六軸並聯機構。這層結構負責處理高頻譜的運動細節。
- 路面紋理與振動:模擬輪胎壓過碎石路、減速帶傳遞到車體的 50Hz 以上高頻振動。
- 載台姿態:精確複製車輛的側傾(Roll)、俯仰(Pitch)以及船艦的搖晃。對於安裝在其上的光電感測器或相控陣列天線而言,這是測試其「穩定補償演算法」的核心輸入。
這種複合運動不僅是位移的疊加,更是對科氏力(Coriolis Force)與陀螺效應的真實重現,這是單軸測試無法達到的物理傳真度。

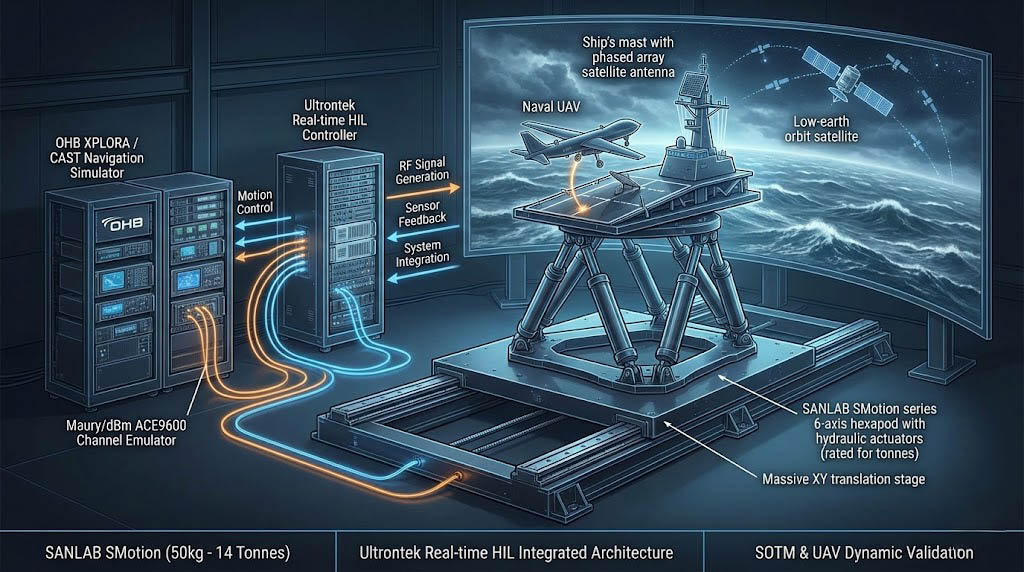
SANLAB SMotion 系列重型運動平台,具備高剛性與高頻寬特性,為複合運動模擬系統的核心物理層。
關鍵應用一:移動中的衛星通訊 (SATCOM-on-the-Move)
隨著星鏈(Starlink)與軍用低軌衛星通訊系統的普及,通訊終端(Terminal)不再固定於地面,而是安裝在劇烈晃動的卡車、船舶甚至飛機上,這產生了極大的技術挑戰:天線必須在載台劇烈運動的同時,精確追蹤一顆快速飛越天際的衛星。
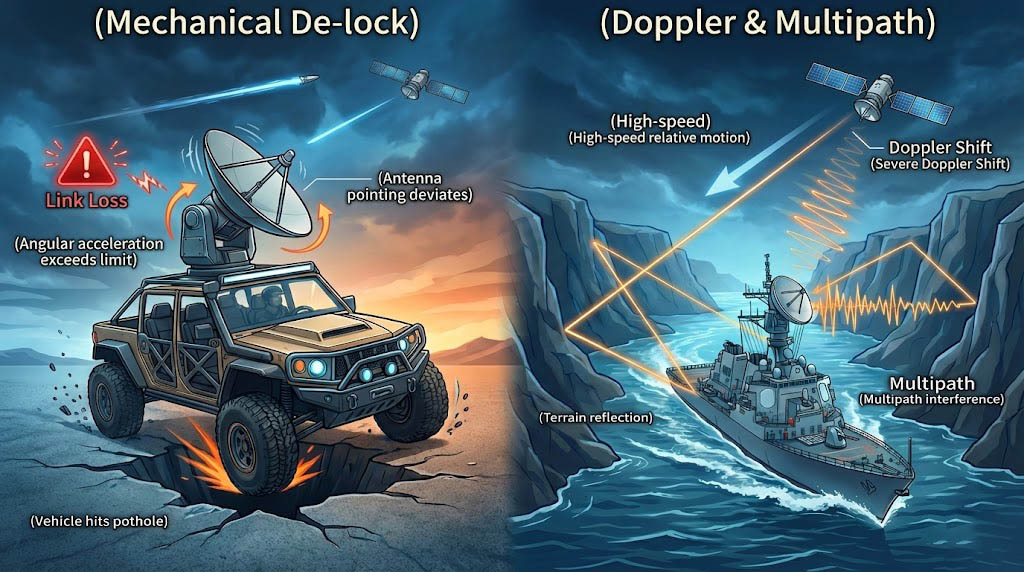
機械與射頻的雙重動態耦合
在 SOTM(SATCOM-on-the-Move)場景中,失效往往來自兩個維度:
- 機械脫鎖:
車輛撞擊坑洞的瞬間,角加速度超過了天線穩定雲台(Gimbal)的馬達扭力極限,導致天線指向偏離衛星,鏈路中斷(Link Loss)。 - 多普勒效應與多路徑:
載台與衛星的高速相對運動會產生劇烈的都普勒頻移(Doppler Shift),而周遭地形(如隧道、峽谷)會造成訊號反射(Multipath)。
6+2 軸系統的驗證方案
利用 6+2 系統結合射頻通道模擬器,我們可以構建一個「物理-電磁雙重迴路」測試場:
- 物理層:
6+2 平台模擬載台在越野路況下的顛簸(六軸)與戰術規避動作(XY 軸),這考驗天線底座的 SANLAB 穩定平台 技術是否能有效隔離載台運動。 - 訊號層:
利用 ACE9600 通道模擬器,根據平台的位置與速度,即時計算並注入對應的都普勒頻移、傳輸延遲與雨衰(Rain Fade)模型。
這種測試能驗證通訊數據機(Modem)的適應性演算法:當天線因震動而輕微偏離時,數據機是否能快速調整調變編碼策略(ACM)以維持連線,而非直接斷線。這是確保戰場通訊韌性的關鍵。

針對移動衛星通訊 (SOTM),穩定平台需補償載台的劇烈姿態變化,確保天線波束鎖定衛星。
關鍵應用二:自駕車的極限邊界測試 (V2X & Sensor Fusion)
自動駕駛技術已進入深水區,Level 4/5 的關鍵在於處理「長尾效應」(Long-tail Cases),即那些極少發生但一旦發生就可能致命的邊界情況。
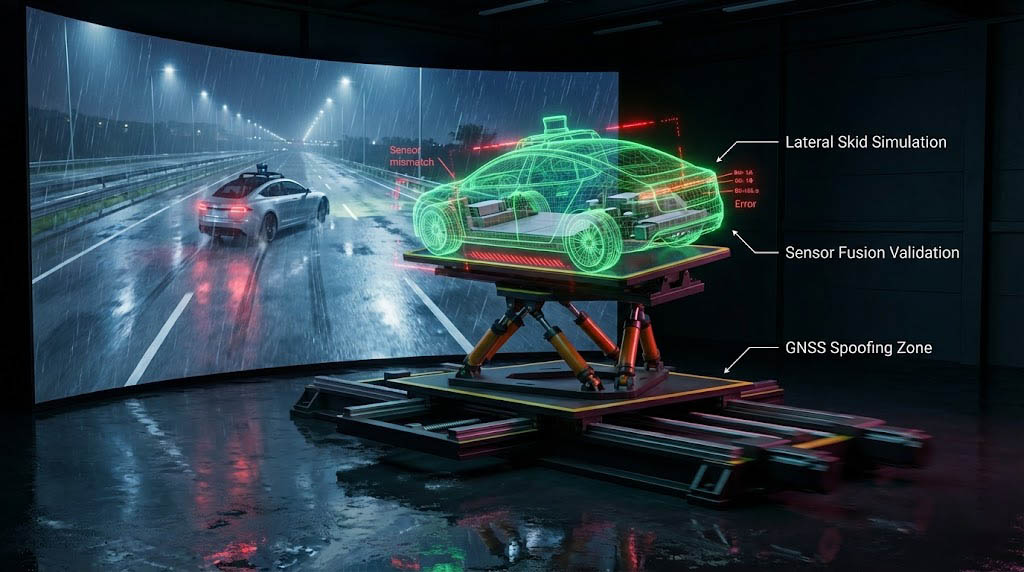
側滑與「迷航」 (The "Lost Robot" Scenario)
當自駕車在結冰或積水路面上高速轉彎時,可能會發生側滑(Skid),此時,車輪在轉動(里程計有讀數),但車輛實際運動軌跡與車輪方向不符,這種數據衝突極易導致感測器融合演算法(Sensor Fusion EKF)崩潰,使車輛「迷航」,利用 6+2 系統的 XY 平移平台,我們可以物理性地模擬這種「車身橫移但車頭未轉」的側滑運動,同時利用 CAST 或 XPLORA GNSS 模擬器 產生與運動同步的 GPS 訊號。
複雜電磁環境下的感知
未來的車聯網(V2X)極度依賴 GNSS 定位,如果車輛行經干擾源(如機場附近或惡意干擾車),GPS 訊號可能會被壓制或欺騙(Spoofing),透過整合 XPLORA Pro 與 GIDAS 干擾偵測系統,測試系統可以在平台執行劇烈閃避動作的同時,注入強烈的射頻干擾。這能驗證自駕車的慣性導航單元(IMU)是否能在 GPS 失效的瞬間,無縫接手導航任務,確保車輛安全停靠。
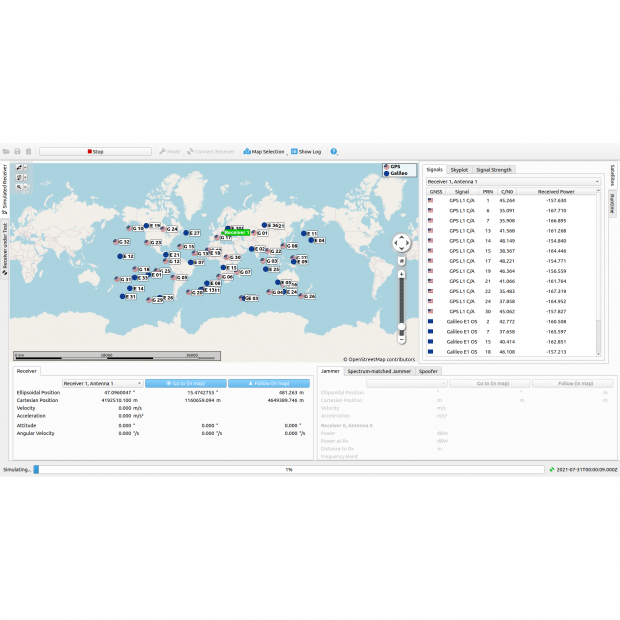
XPLORA Pro 模擬軟體可即時生成複雜的 GNSS 星座與干擾訊號,與運動平台同步進行導航強韌性測試。
全域動態生態系:硬體迴路 (HIL) 的深度整合
上述應用的核心在於「同步」,如果運動平台往左晃,但模擬的 GPS 訊號顯示往右,待測系統會立即判定感測器故障,因此必須建立一個微秒級(<1ms)同步的 硬體迴路(Hardware-in-the-Loop, HIL) 生態系。
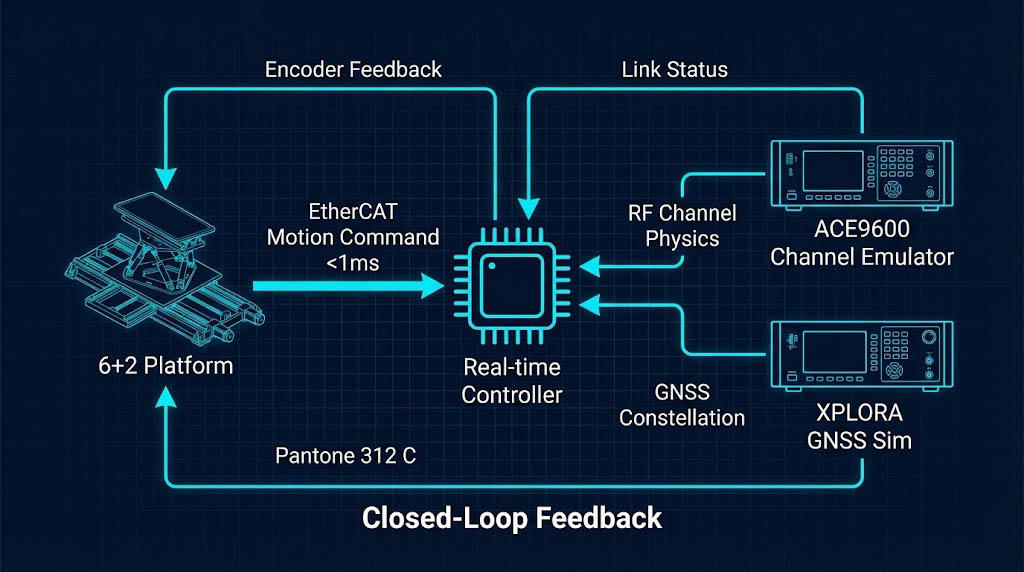
EtherCAT 實時通訊骨幹
為了達成這種極致的同步,系統採用 EtherCAT 作為神經網路。
- 實時控制器 (Real-time Controller):作為大腦,以 1000Hz (1ms) 的頻率更新載台的運動軌跡。
- 運動指令:透過 EtherCAT 驅動 6+2 平台的伺服馬達,產生物理運動。
- 訊號指令:同步發送位置數據給 CAST/XPLORA 模擬器 與 ACE9600,確保 RF 訊號的相位中心(Phase Center)與物理平台的位置完全重合,。
這種架構不僅驗證了單一設備,更驗證了整個系統在「物理-資訊」交互作用下的動態行為,是目前國際高階實驗室的標準配置。
建構未來的動態驗證標準
綜上所述,建置「6+2 軸複合運動模擬系統」不僅是硬體設備的升級,更是科研與產業界從「靜態規格」邁向「動態生存率」驗證的關鍵里程碑,它填補了傳統震動機(缺乏大位移)與駕駛模擬器(頻寬不足)之間的技術缺口,提供了獨有的複合運動線索;面對未來通訊與自駕技術的複雜性,唯有透過這種結合機械力學、電磁頻譜與數位孿生的全維度測試場域,才能確保我們的衛星終端、自駕車與無人載具,在部署前已通過最嚴苛的物理環境考驗。
針對上述高科技測試需求,奧創系統科技(Ultrontek) 提供了完整的整合解決方案。
奧創不僅提供 SANLAB 的高階運動模擬平台(涵蓋從 50kg 到 14 噸的 SMotion 系列,以及專用的穩定平台技術),更具備深度整合 OHB XPLORA / CAST Navigation 衛星導航模擬器、Maury/dBm ACE9600 通道模擬器的工程能力,透過奧創的 Real-time HIL 整合架構,客戶可以獲得一套完整的 6+2 軸動態驗證實驗室,從無人機的甲板起降到低軌衛星通訊的動態連結,提供一站式的技術支援與客製化服務,協助客戶在下一代通訊與載具技術競賽中取得領先地位。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008