
適航性極限:解構 6+2 軸動態模擬在 eVTOL 城市空中交通與垂直起降場的驗證革命
從「能飛」到「安全降落」的最後一哩路
隨著「敏捷至上」(Agility Prime)計畫的推動與城市空中交通(Urban Air Mobility, UAM)概念的實體化,電動垂直起降飛行器(eVTOL)正處於商業化爆發的前夜,然而當這些「飛行計程車」試圖從實驗室飛進高樓林立的都會區時,面臨著一個物理學上的巨大障礙——「都市峽谷效應」(Urban Canyon Effect)。
在摩天大樓之間,氣流會被壓縮、加速並產生不可預測的亂流與切變(Wind Shear),當一架載人或載貨的 eVTOL 試圖降落在 50 層樓高的垂直起降場(Vertiport)時,它可能在進場的最後幾秒遭遇瞬間強烈側風,傳統的飛行模擬器(Flight Simulator)大多採用長行程的液壓腳架,雖然能模擬飛行姿態,但缺乏模擬突發性「橫向平移」的高動態能力;而單純的振動台又無法提供足夠的空間位移。
為了取得嚴苛的適航認證(Airworthiness Certification),工程界正導入「6+2 軸複合運動模擬系統」作為驗證核心,本文將探討此架構如何透過重現極端氣流下的動力學響應,為 eVTOL 的飛控電腦(FCC)與電池結構提供生死攸關的驗證數據。

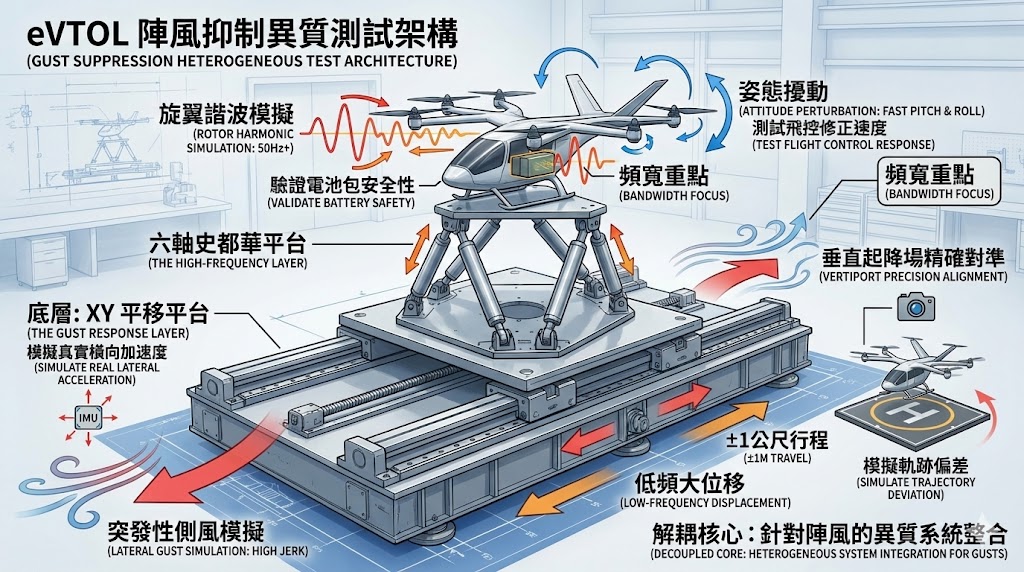
系統工程核心:針對「陣風抑制」的異質架構
eVTOL 與傳統飛機最大的不同,在於其對氣流的敏感度極高且缺乏滑跑緩衝,為了在實驗室內複製空中懸停(Hover)時遭遇的複雜力學環境,測試系統必須具備將「高頻振動」與「低頻大位移」解耦的能力。
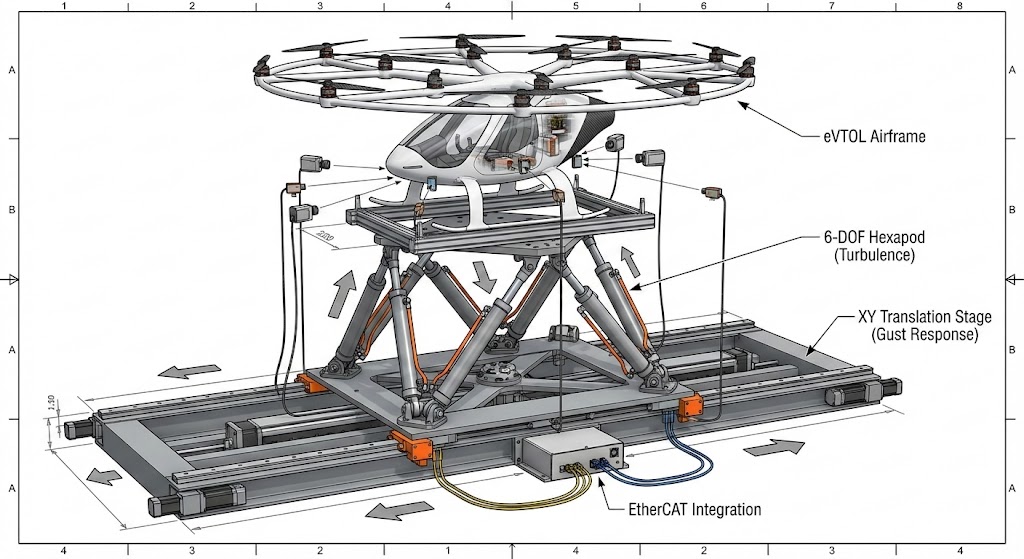
上層:六軸史都華平台 (The High-Frequency Layer) —— 氣動彈性與振動
位於上方的是高剛性的六軸平台(Stewart Platform),與一般強調大行程的飛行模擬器不同,此層級的設計重點在於頻寬(Bandwidth)。
- 旋翼諧波模擬:eVTOL 通常擁有多個螺旋槳,其高轉速會產生複雜的振動頻譜,六軸平台需產生 50Hz 以上的振動,模擬馬達與螺旋槳傳遞到機身的混合頻率。這對於驗證電池包(Battery Pack)內的電芯是否會因長時間共振而發生接觸不良或熱失控至關重要。
- 姿態擾動:精確複製機身在亂流中的快速俯仰(Pitch)與滾轉(Roll),測試飛控電腦的姿態解算與修正速度。
底層:XY 平移平台 (The Gust Response Layer) —— 模擬風切與側推
位於基座的是行程達 ±1 公尺的 XY 平移台,這是傳統模擬器所缺乏的關鍵拼圖。
- 突發性側風模擬(Lateral Gust Simulation):當 eVTOL 飛越建築物轉角時,常遭遇突發側風,在物理上,這表現為機身瞬間產生巨大的橫向加速度,XY 平台能以高加速度(High Jerk)驅動整個系統橫移,讓機上的慣性量測單元(IMU)感受到真實的「被風推著走」的物理量。
- 垂直起降場的精確對準:模擬在視距外(BVLOS)自動降落時,因陣風導致的軌跡偏差,強迫視覺導航系統進行修正。
關鍵應用場景一:垂直起降場 (Vertiport) 的抗風切驗證
在城市樓頂降落是 UAM 運作最危險的階段,除了地面效應(Ground Effect)外,建築物邊緣的渦流會對機身產生強烈的擾動。
模擬「失控邊緣」 (Edge of the Envelope)
透過 6+2 軸系統,我們可以設計出極限驗證腳本:
- XY 軸模擬陣風:設定 XY 平台執行隨機的脈衝運動(Pulse Motion),模擬陣風對機身的瞬間側推力。位移量可達 1 公尺,速度可超過 1.5 m/s。
- 六軸模擬亂流:同時疊加高頻的姿態擾動。
這種複合運動目的在測試 eVTOL 的陣風抑制演算法(Gust Rejection Algorithm):當機身被外力猛烈推動時,馬達控制器(ESC)能否在毫秒級內調整轉速以產生反向推力,且不會因為過度修正(Over-correction)導致機身翻覆。這是取得載人飛行許可的關鍵測試項目。

關鍵應用場景二:電池與結構的氣動彈性 (Aeroelasticity) 測試
eVTOL 的結構輕量化要求極高,這導致機身剛性較傳統飛機低,容易產生氣動彈性顫振(Flutter),此外,高能量密度的鋰電池組對振動極為敏感。
動態負載下的結構完整性
利用 6+2 軸系統,工程師可以在地面進行「飛行重現」:
- 頻譜複製:將試飛中採集到的真實振動數據(Time Domain Data)輸入給六軸平台,讓其在實驗室內精確重現長達數小時的飛行振動環境。
- 複合疲勞測試:在 XY 軸模擬反覆的加減速機動(如頻繁的起降循環)的同時,六軸平台持續輸入旋翼振動。
這能驗證電池模組的連接器是否會鬆脫、冷卻液管路是否會因疲勞而洩漏,以及複合材料機翼是否會因長期震動而產生微裂紋,這種「動態疲勞測試」比傳統的靜態應力測試更能反映真實壽命。
關鍵應用場景三:都市峽谷中的導航強韌性
在摩天大樓間飛行時,GNSS 衛星訊號會受到嚴重的遮蔽與多路徑反射(Multipath),導致定位誤差瞬間飆升至數十公尺,eVTOL 必須依賴視覺導航(Visual Odometry)與慣性導航的融合來維持定位。
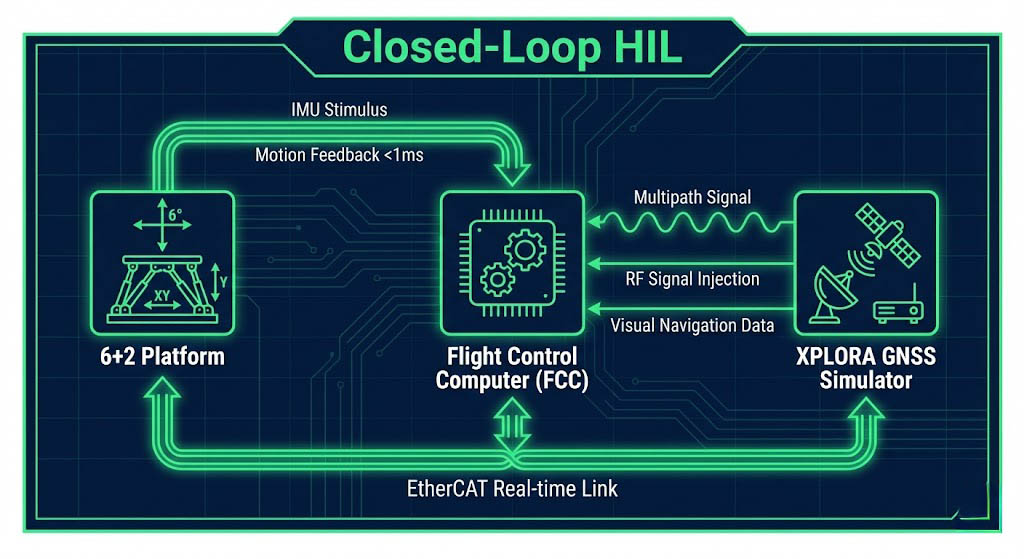
全域 HIL:當運動遇見訊號
為了驗證導航系統,必須建立硬體迴路(HIL)生態系:
- 物理運動:
6+2 平台模擬機身在樓宇間穿梭的複雜軌跡。 - 衛星訊號模擬:
利用 OHB XPLORA Pro 模擬器,根據平台的實時位置,動態計算並生成受到建築物遮蔽的 GPS/Galileo 訊號,特別是利用其多路徑模型(Multipath Models),重現訊號在玻璃帷幕大樓間反射的混亂狀況。 - 視覺與慣性融合:
結合 CAST-Inertial 系統注入虛擬 IMU 數據,驗證當 GPS 訊號因大樓遮蔽而突然消失(Outage)時,eVTOL 的導航電腦能否無縫切換至視覺/慣性導航,而不會發生迷航或撞擊。

XPLORA Pro 軟體介面可精確模擬城市環境中的衛星遮蔽與多路徑效應,為 UAM 導航驗證提供關鍵的射頻環境。
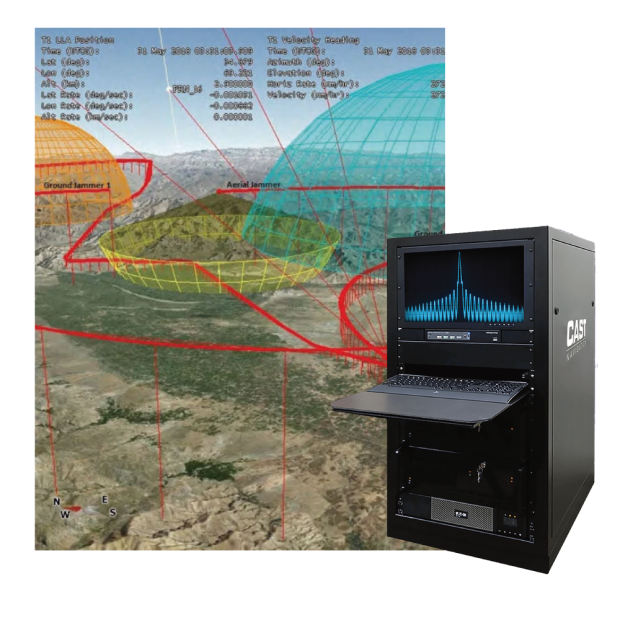
CAST-CRPA 系統是一套高精度 GNSS 波前模擬平台,支援多頻多星系訊號生成與動態 6-DOF 載具模擬,專為 CRPA 控制接收波束天線設計;可同時模擬 GNSS 與干擾訊號,具備相位一致性與可程式化能力,並搭配圖形化介面支援高度客製化場景設定,適用於軍用與商用導航測試需求。
定義未來的適航標準
「6+2 軸複合運動模擬系統」不僅是測試設備,更是 eVTOL 從概念走向商用的安全守門員,它填補了傳統風洞(缺乏動態位移)與試飛(風險過高)之間的缺口,提供了一種可重複、可控制且全維度的驗證手段;在未來,能否透過這種結合極端物理擾動與複雜電磁環境的「動態生存率」測試,將成為衡量一架 eVTOL 是否具備城市飛行資格的核心標準。
針對 eVTOL 與 UAM 的高階測試需求,奧創系統科技(Ultrontek) 提供了領先業界的整合方案。
奧創系統提供 SANLAB 的高動態 6+2 軸運動平台(具備優異的 EtherCAT 實時通訊能力),以及 OHB XPLORA 高階 GNSS 模擬器,透過奧創系統的 Real-time HIL 架構,客戶可以在實驗室內構建出虛擬的「紐約」或「台北」空域,同步模擬強烈的樓宇風切(機械運動)與嚴苛的衛星訊號遮蔽(射頻環境),這套整合式解決方案將協助航太製造商加速適航認證流程,搶佔未來空中交通的制高點。
在 奧創系統科技,我們不只提供單點設備,我們構建的是全域的整合思維。
從企業場域的精密佈局,到專案交付時的軟硬體協同,我們始終貫徹確保每一個節點、每一條訊號,都在最嚴苛的標準下,達成完美的系統共振。
實際系統配置將因應您的測試應用、規範、場地限制及待測物特性而有所不同。如需深入規劃與系統或軟硬體選配搭配建議,請聯繫「奧創團隊」,我們擁有豐富的系統整合經驗,隨時準備為您提供最專業的配置建議與技術支援。
- 線上表單: 點此填寫需求單
- 業務信箱: INFO@ultrontek.com
- 來電洽詢: 02 2278-9008