

R&S RadEsT 與 CARLA VIL 測試解決方案
重塑車輛迴路測試 (VIL):逼真雷達與攝影機同步模擬
在先進駕駛輔助系統 (ADAS) 與自動駕駛 (AD) 的開發過程中,測試驗證常受限於昂貴且封閉的專有平台,不僅大幅提高成本,更犧牲了開發的靈活性;為突破此困境,本解決方案創新地整合了 R&S RadEsT 車用雷達目標產生器與國際主流的 CARLA 開源駕駛模擬器,此整合充分利用 CARLA 龐大且靈活的虛擬測試場景資料庫,並結合 R&S RadEsT 精準、即時的 OTA 雷達回波產生能力,打造出一個物理世界與虛擬環境完美同步的高傳真測試平台。
開發者因此能擺脫專有解決方案的束縛,在一個具備高度擴展性與成本效益的開放架構中,實現逼真的雷達與攝影機同步模擬,從而大幅加速感測器融合演算法的驗證與部署流程。
量測任務
先進駕駛輔助系統 (ADAS, Advanced Driver Assistance Systems) 與自動駕駛 (AD, Autonomous Driving) 功能需要大量的實際道路測試,以確保其安全性、穩健性與法規符合性,隨著感測器融合與演算法的複雜性日益增加,對於可控、可重複且具備成本效益的驗證環境需求也變得更加迫切。
車輛迴路 (VIL, Vehicle in the Loop) 系統透過結合實體感測器、致動器與虛擬駕駛情境,已成為一個強大的解決方案,然而,傳統的 VIL 設置通常仰賴專有的模擬平台和複雜的硬體迴路 (HIL, Hardware in the Loop) 配置,這些系統不僅建置成本高昂,設定與在不同滾輪測試台之間的轉移也相當困難,尤其是在與現有的滾輪測試台或產線終端 (EOL, End-of-Line) 系統整合時,挑戰更為顯著;在此背景下,雷達感測器驗證成為一項關鍵挑戰,以電子方式產生能精準呈現移動車輛及其周遭環境的逼真、同步雷達回波至關重要,若缺少這些回波,將幾乎不可能對偵測、追蹤與決策演算法進行有意義的測試。
將 R&S RadEsT 與 CARLA 整合至 ADAS/AD VIL 功能測試台
應用
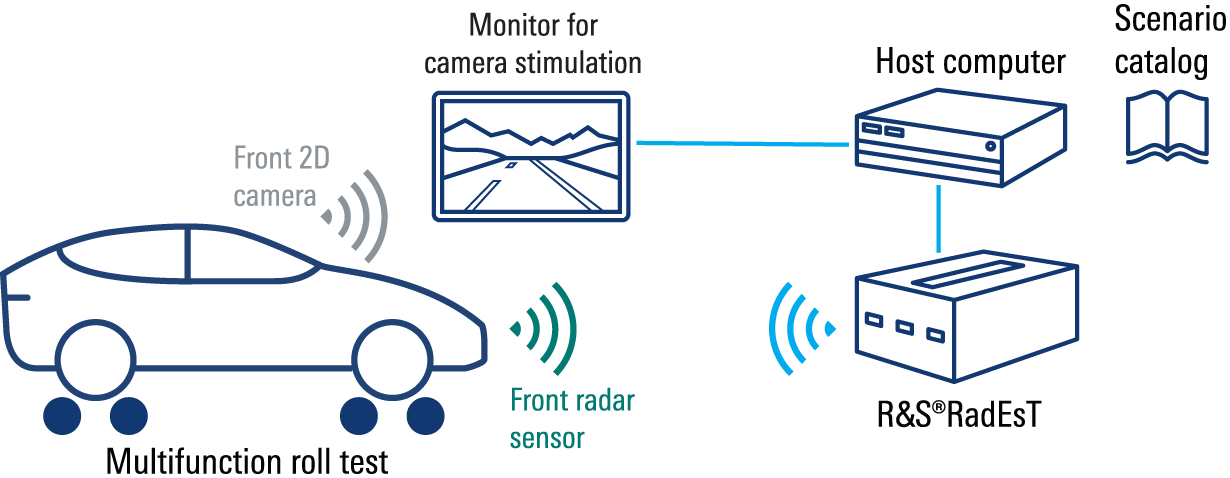
在一個典型的設置中,自駕車被放置在滾輪測試台(也稱為動態車輛測試儀)上,同時由一個模擬環境產生動態交通情境,用以刺激雷達與攝影機感測器,雷達目標資料會即時傳送至 R&S RadEsT 雷達目標模擬器,該模擬器能透過空中下載 (OTA, Over-the-Air) 技術產生與虛擬場景精準對齊的回波;與此同時,一個顯示系統會將模擬的環境呈現給車輛的前置攝影機。
這種配置能夠對運用雷達和攝影機的感知系統進行同步測試,讓開發人員得以在 ADAS/AD 軟體堆疊中評估物件偵測、追蹤與感測器融合的效能,此系統支援廣泛的測試情境,包括:關鍵的邊緣案例與多樣化的環境條件,且所有測試皆在可控、可重複且安全的條件下進行,諸如:主動式巡航控制 (ACC, Adaptive Cruise Control)、自動緊急煞車 (AEB, Automatic Emergency Braking)、車道維持輔助 (LKAS, Lane Keeping Assist) 及盲點偵測 (BSD, Blind Spot Detection) 等關鍵的 ADAS 功能,都能在此設置中獲得逼真的驗證。
Rohde & Schwarz 解決方案
透過將 R&S RadEsT 雷達目標模擬器嵌入 CARLA 開源駕駛模擬器,重新定義了 VIL 測試,這項創新的整合,將 OTA 雷達模擬的物理真實性與虛擬測試環境的靈活性及開放性完美結合。
整合的關鍵優勢
- 即時雷達目標產生:
利用 CARLA 開源駕駛模擬器的動態場景資料,包含車輛、行人與基礎設施,即時產生與模擬環境同步的精準雷達目標。 - 精準同步:
透過穩健的介面與同步機制,確保雷達刺激與自駕車的運動、感測器位置和時間參考緊密耦合,實現高度精確的模擬。 - 可擴展且具適應性的系統架構:
相容於多種滾輪測試台與測台,此系統大幅簡化了設置的複雜性,並為不同的實驗室和測試環境提供最大的靈活性。 - 具備成本效益的 VIL 測試:
結合 CARLA 與 R&S RadEsT 雷達目標模擬器,打造一個可擴展、高效能的 VIL 設置,其成本僅為專有解決方案的一小部分,這種方法適用於開發與驗證階段,能顯著降低測試開銷並優化預算分配。 - 靈活的開源模擬平台:
客製化您的測試環境以符合特定的開發目標,CARLA 提供對交通情境、環境條件和感測器配置的完全控制,有助於快速創建複雜的邊緣案例與量身打造的測試場景。 - 逼真的即時雷達刺激:
透過 R&S RadEsT 由 CARLA 動態模擬資料直接驅動,即時產生 OTA 回波,實現高度精確的雷達感測器測試,這使得同步且精準的刺激成為可能,從而獲得可重複且可靠的結果。 - 無縫整合至現有設置:
能輕鬆部署於各種測試環境、底盤測功機、EOL 站點或實驗室設置中,且僅需最少的配置,可將 VIL 測試嵌入現有工作流程,而無需進行重大的基礎設施變更。 - 前瞻性的模組化設計:
此系統建構在一個模組化、開放的架構之上,支援未來與其他模擬工具、平台和資料系統的整合,讓您能夠隨著 ADAS 需求的演進而擴展和調整。 - 為定期技術檢驗 (PTI) 與車隊測試做好準備:
隨著 ADAS 成為安全合規的必要條件,此解決方案亦支援未來的應用案例,例如:定期技術檢驗 (PTI, Periodic Technical Inspections) 檢測與車隊層級的驗證,將其價值從開發階段延伸至營運測試和法規保障。


小型化且輕巧的 R&S RadEsT 雷達基礎測試儀,機構尺寸 (寬 × 高 × 深):186.5 mm × 138.6 mm × 275 mm (7.34 in × 5.46 in × 10.83 in),重量:3.2 kg (8 lb)。
相關產品
R&S RadEsT 車用雷達目標模擬器
雷達測試的基石:從實驗室到實車的全能夥伴

R&S RadEsT 是一款功能廣泛且多用途的車用雷達目標模擬器,其設計可滿足從實驗室到實車的所有測試需求,憑藉其穩健的特點、寬廣的應用範圍和卓越的價值,R&S RadEsT 為雷達測試開創了新的可能性,體驗 R&S RadEsT 帶來的全能優勢,它是實現精準、可靠且動態雷達目標模擬的完美解決方案。
主要特點
- 動態且精準的目標模擬
- 驗證雷達感測器訊號功率 (EIRP, Effective Isotropic Radiated Power)
- 確定佔用頻寬
- 內建自我檢查功能
- 電池供電
CARLA
為自動駕駛研究而生的開源模擬器

CARLA 的開發初衷即是為了支援自動駕駛系統的開發、訓練與驗證,除了開源程式碼與協定外,CARLA 還提供為此目的而創建的開放數位資產(都市規劃、建築、車輛),並且可供免費使用,該模擬平台支援感測器套件的靈活規格定義、環境條件設定、對所有靜態與動態角色的完全控制,以及地圖產生等眾多功能。